
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


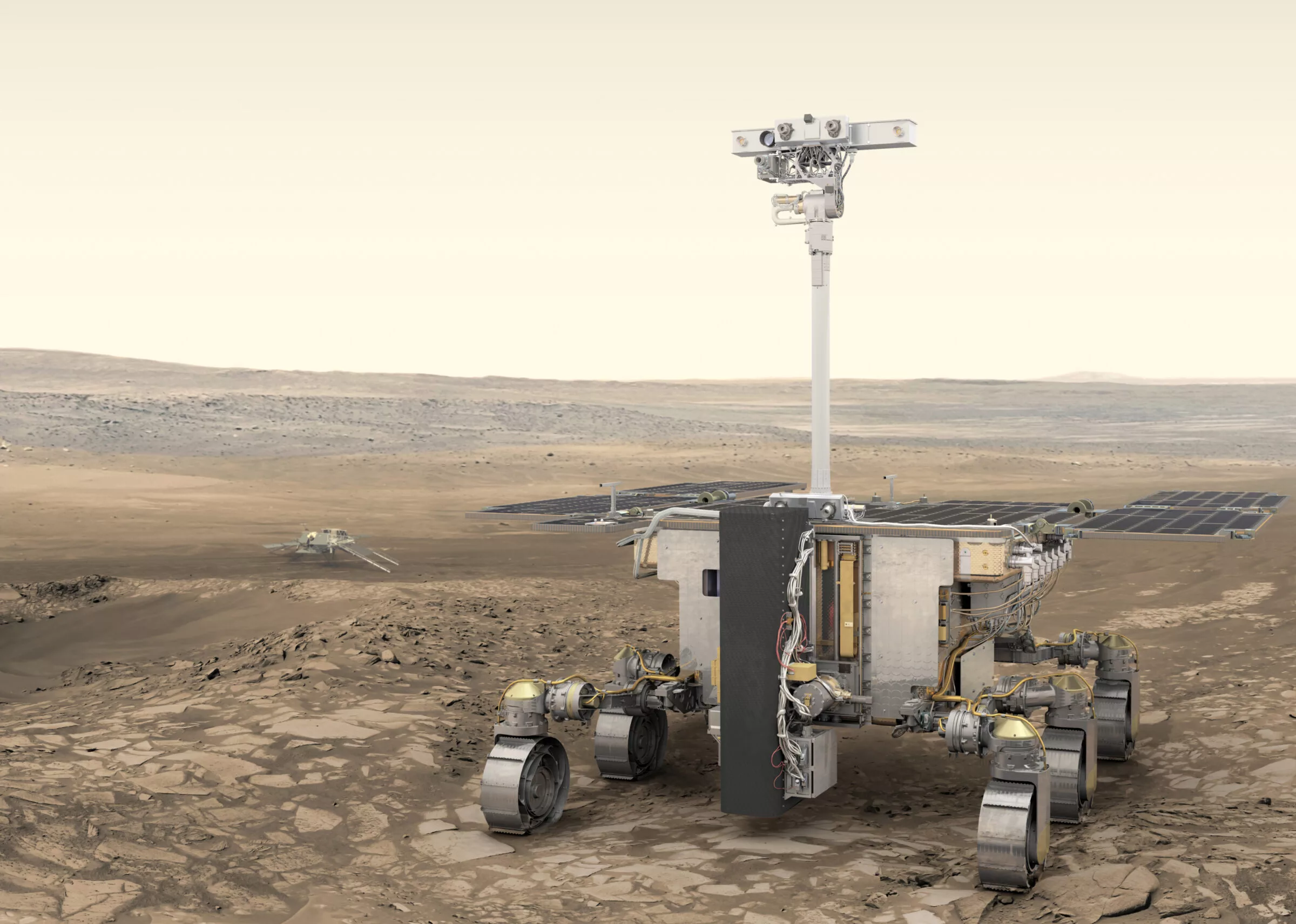
ExoMars Rosalind Franklin rover
Highlights
- The European Space Agency plans to launch its ExoMars rover, named Rosalind Franklin, in 2028.
- Rosalind Franklin will search for signs of past Martian life in an ancient watery environment using its sophisticated instruments.
- The rover is highly autonomous and agile, a crucial step in building technologies for future Mars exploration.
What is the ExoMars mission to Mars?
The intent of the ExoMars program is embedded in the program’s name, ExoMars, where ‘Exo’ refers to exobiology, the study of life beyond Earth.
ExoMars is made up of two Mars missions. The first — Trace Gas Orbiter — was launched in 2016 to study the likelihood of present Martian life from orbit. The second mission — a rover — will hunt for signs of past life on Mars’ surface. The rover is named Rosalind Franklin after the prominent British scientist who helped discover DNA’s structure. Rosalind Franklin is Europe’s first Mars rover and is designed to detect preserved signatures of life unlike any mission before.

What is the European Space Agency (ESA)?
The international space agency helping European countries work together.
The landing site of the ExoMars rover
In order to increase the chances of the Rosalind rover finding signatures of past martian life, ESA went through a rigorous process to select its landing site over six years. The rover will explore the Oxia Planum region of Mars, a 3.9 billion years old clay-rich area surrounded by ancient valley systems, all strongly hinting at a watery past. Notably, Oxia Planum was a candidate landing site for NASA’s Perseverance rover.
There are signs of volcanic activity in the region, which may have overlaid the clay and other aqueous deposits. This could’ve preserved any life imprints below the surface, protected against the planet’s harsh radiation environment. These deposits have been exposed by erosion only within the last few hundred million years, giving the Rosalind rover a great opportunity to look for preserved remnants of microbial life.
How will the Rosalind rover look for signs of past life on Mars?
The six-wheeled Rosalind rover is designed to travel long distances in Oxia Planum over the length of its mission. Two panoramic stereo cameras and a high-resolution imager on its mast will help identify the best sites for the rover’s comprehensive instruments to analyze in detail. Aiding this task would be the rover’s infrared spectrometer, which will identify rocks altered by water in Mars’ past and water-bearing minerals on them.
For the most intriguing of such rocks, the rover will closely inspect them at a sub-centimeter scale — like a geologist with a hand lens — to help scientists better understand the chain of events that formed and shaped these rocks. This closeup imager can also identify preserved biofilm traces of any ancient microbial colonies that might have thrived in a watery environment.
Since finding signatures of past Martian life is likelier below the surface, as that affords protection from surface radiation, the Rosalind rover has a 2-meter (about 6.6 feet) drill to collect deeper samples than any previous Mars mission. Further, unlike other missions which rely on surface imagery and data to select areas to drill, the Rosalind rover will also use ground-penetrating radar to let scientists see up to 3 meters (about 9.8 feet) underground. It will also employ its neutron spectrometer to detect hydrogen — an indirect sign of water — to locate promising underground water-rich deposits. Having such holistic information about all promising locations will help scientists find optimal drilling points.
While the Rosalind rover drills Mars’ surface, a miniature spectrometer embedded inside the drill will image the walls of the borehole and determine its mineral makeup, providing scientists context for the collected samples. Once the rover has collected a drill sample, three spectrometers will study it in microscopic detail.
A visible-plus-infrared spectrometer will identify molecules and water-bearing minerals in the samples, helping scientists determine if the region was ever habitable. A Raman spectrometer will detect organic molecules within the samples, providing direct information on if Mars had specific organic compounds related to microbial life as we know it. Lastly, a gas chromatograph will detect even small concentrations of organic molecules in the samples, and determine their chirality, a chemical property, to tell us if they formed because of microbial life or by natural means.
The Rosalind rover thus provides us an unprecedented and promising shot at finding out if microbial life existed and thrived on Mars.
Preparing for Mars
Since operating a rover on Mars involves a four-to-24-minute time lag, it limits what a rover can do daily. ESA has thus designed the Rosalind rover to be highly autonomous and agile, an ability also useful as ESA prepares technologies for future Mars exploration.
The rover can autonomously and safely navigate to target destinations by avoiding rocks and other hazards, driving over boulders the size of its wheels, and negotiating steep slopes. If it gets stuck in soft or fluffy sand, it can lift each of its wheels independently to dig into and sweep along the surface — what ESA calls “wheel walking” — to get out of it. ESA conducted several roving tests on simulated Mars terrain with a test model to verify these abilities.
Russian participation
ESA previously partnered with the Russian space agency Roscosmos on the project. Russia would have provided a landing platform named Kazachok. ESA suspended the agreement after Russia’s invasion of Ukraine in February 2022. In a statement, ESA said its ruling council “acknowledged the present impossibility of carrying out the ongoing cooperation with Roscosmos on the ExoMars rover mission with a launch in 2022."

Support missions like ExoMars
Whether it's advocating, teaching, inspiring, or learning, you can do something for space, right now. Let's get to work.
Acknowledgments: this page was initially written by Jatan Mehta in 2021.