
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Opportunity Scales Spirit Mound, Takes Shot at Schiaparelli
Sols 4511 - 4540

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
November 5, 2016
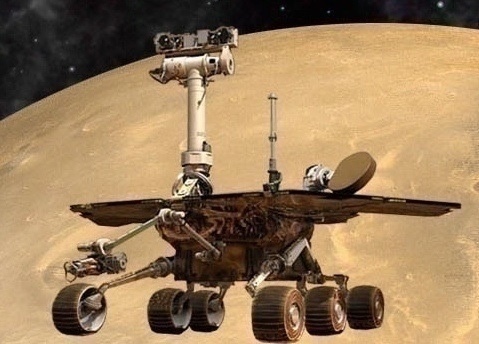
Mars Exploration Rover
NASA / JPL-Caltech / Maas Digital
Deep in the western rim of Endeavour Crater at Cape Tribulation, Opportunity spent the month of October on Spirit Mound studying the rich yet familiar geology at the first science stop on the Mars Exploration Rovers (MER) 10th extended mission – pausing only to take a shot at freeze-framing part of the descent of Europe’s Schiaparelli lander.
Imaging the Schiaparelli Entry, Descent and Landing Demonstrator Module (EDM) would require Martian luck, as well as Earthling skill. Part of the ExoMars programme, a joint mission of the European Space Agency (ESA) and the Russian space agency Roscosmos, Schiaparelli was dispatched to test technology for future soft landings on the surface of the Red Planet. Capturing images of the spacecraft would be almost as difficult for Opportunity as safely landing would be for Schiaparelli.
Schiaparelli hit the Martian atmosphere and began “six minutes of hell” as scheduled on October 19th and sped toward the surface of the Red Planet. Traveling at 21,000 kilometers per hour, the small European spacecraft was aiming for a target ellipse in Meridiani Planum not far from where Opportunity landed in 2004. The spacecraft was to deploy and jettison a parachute and then fire retro rockets to “soft land” on the surface.
Opportunity had less than a 1 in 3 chance of capturing images of Schiaparelli’s parachute. Schiaparelli’s odds of landing were, arguably, roughly the same.
Even if both lander and Opportunity succeeded, the parachute would only show up as one pixel in the rover’s Pancam frames. And it would be difficult to define. Nevertheless, in addition to allocating some of their downlink time to the ESA mission, the MER team staged two dress rehearsals for Opportunity and her Panoramic Camera (Pancam).
“We just don't get that many chances to image things that are landing on the surface of another world,” said John Callas, MER Project Manager, of the Jet Propulsion Laboratory (JPL), home to all NASA’s Mars rovers. Besides that, he added: “We wanted to support our fellow Mars explorers and allow them the best chance for success.”
Just 50 seconds before Schiaparelli was to land however, mission control lost contact with the spacecraft. The analysis began immediately and it brought reality front and center. Landing on Mars is still extremely difficult. It’s as simple and biting as that.
The Mars exploration community, despite all the recent talk of a human mission, is still a very small community. Not hearing the signal of survival from Schiaparelli was sobering for everyone.
Two days later, NASA released photos of Schiaparelli and its parachute. The before and after images taken by the High Resolution Imaging Science Experiment onboard the Mars Reconnaissance Orbiter (MRO) – known simply as the HiRISE camera – seemed to confirm what many in the Mars community had assumed: the European lander had crash landed.
The HiRISE images of Schiaparelli caused many of the MER team members to reflect on just how tricky landing on Mars is and just how remarkable Opportunity’s journey has been. Back in 2004, the odds then were 2 in 3 missions to Mars failed, and most of those were orbiters. One could count on a couple of hands and, okay, a couple of feet maybe, the number of people outside the team who truly believed that Spirit and Opportunity would land and successfully carry out their primary missions.
Since then, the MER team has lived and worked by a kind of code: “Every day on Mars is a gift.” Steve Squyres, MER Principal Investigator of Cornell University, first said it in those still early days, and has continued to repeat what has become the team’s guiding principle throughout the years.

Scaling Spirit Mound
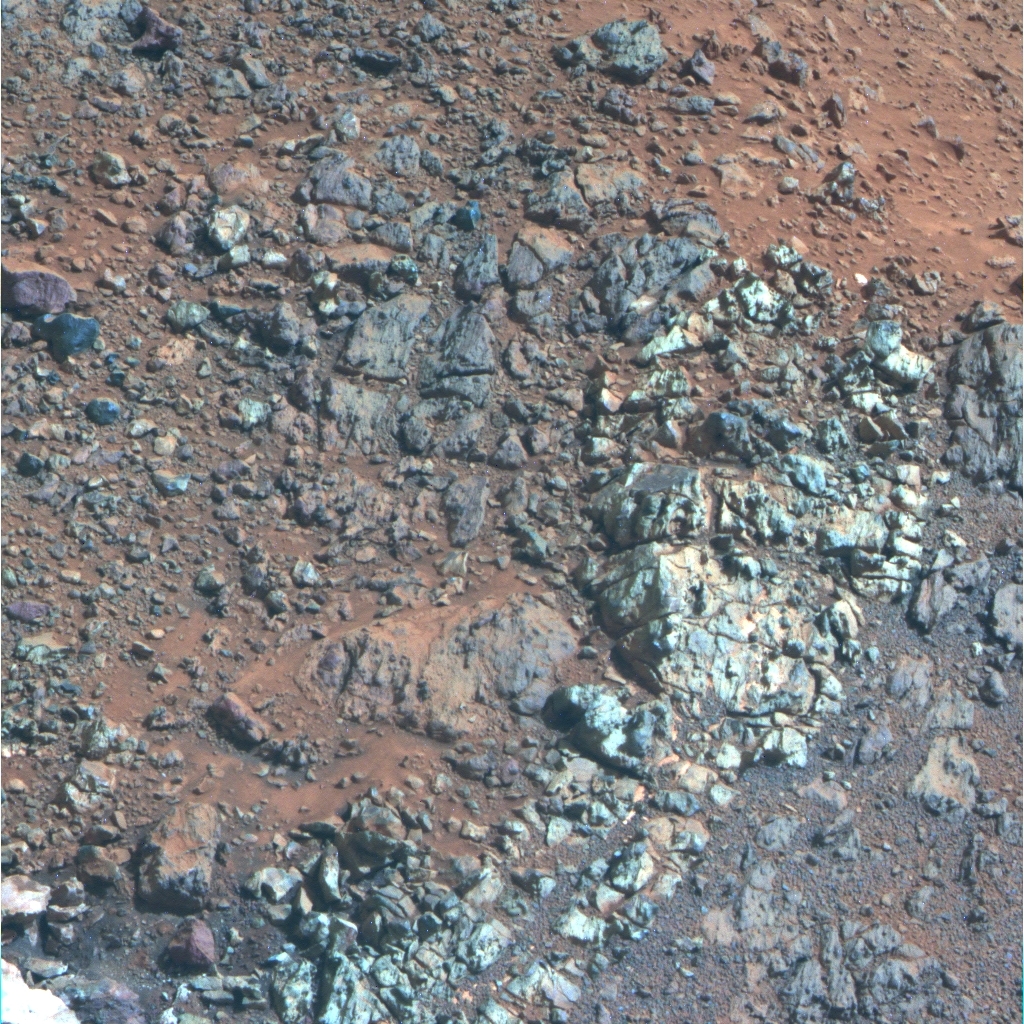
Opportunity took this image with her Panoramic Camera (Pancam) on Oct. 26, 2016, her Sol 4,534th Martian day or sol of exploration. It shows a part of Spirit Mound, which the rover scaled in October. The Pancam team processed this view in false color, a technique that allows scientists to better define and describe the various geological features in the image.NASA / JPL-Caltech / Cornell / ASU
While Spirit, Opportunity, Phoenix, and Curiosity seemingly improved the odds for landers, getting a spacecraft safely through the “six minutes of terror” (as NASA refined the phrase) and to the surface is still rocket science.
“It’s different every time,” Rob Manning told the MER Update years ago. Currently the Chief Engineer for the Low Density Supersonic Decelerator (LDSD) Project, MER Update readers remember Manning as the rocket scientist who led MER’s Entry Descent and Landing (EDL) team, as well as Pathfinder's EDL team, and who later served as Chief Engineer for the Mars Program at JPL, and for the Mars Science Laboratory/Curiosity mission.
Every time a spacecraft commits to diving into Mars’ atmosphere, only this much is certain: a harrowing ride has just begun. There is little to no margin of error on these missions. And yet a team, a group of engineers and scientists can do every single thing right and Mars can change the outcome in an instant. Whatever happened to Schiaparelli, the lander did not survive to complete its mission and ESA will have to take in the lessons learned and try again.
Although the sky over Endeavour Crater got a little hazier in October, Opportunity escaped the potential wrath of the Martian spring and worked through another month under “storm-free skies,” according to the Mars Weather Reports produced by the Malin Space Science System group that operates the Mars Color Imager (MARCI) onboard MRO.
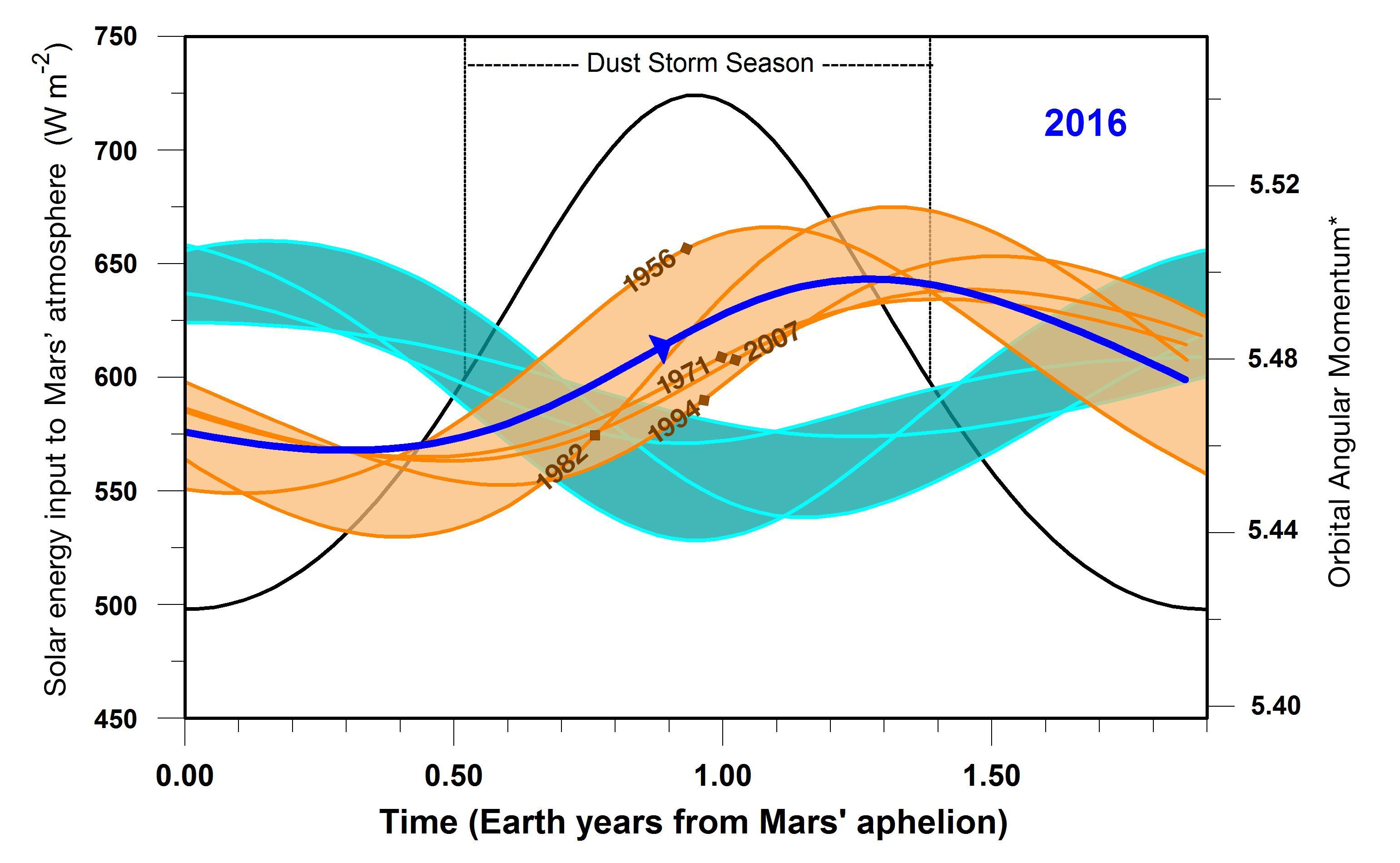
Meanwhile, James Shirley, a planetary scientist at JPL, who has been studying the historical pattern of dust storms on Mars, published a prediction October 5th that points to Mars experiencing a global dust storm in the next few months. Shirley’s 2015 paper in the journal Icarus reported finding a pattern in the occurrence of global dust storms when he factored in a variable linked to the orbital motion of Mars.
The MER mission last suffered a planet-circling dust storm in June–July 2007. Opportunity was literally pummeled by the storm and there were some long sols and nights when there was deep concern the rover would not make it. But true to her MER mettle, Opportunity managed somehow to shake off the dust and carry on.
So far this Martian spring “the rover has experienced no dust storms,” said Callas. “The Godzilla dust storm for Mars seems to be kind of like the Godzilla of El Niños predicted for California.”
That Godzilla of El Niños never arrived in California. However: “It ain’t over ‘til it’s over,” as Yankee philosopher Yogi Berra put it. And, the Chicago Cubs did just win the World Series.
In other words, there are still weeks to go. According to Shirley’s prediction: Mars reached the midpoint of its current dust storm season on October 29th. “Based on the historical pattern found,” it is “very likely that a global dust storm will begin within a few weeks or months of this date.”
Truth be told, the MER team “actually packed sandbags around the doorway to the rover testbed” in preparation for the Godzilla El Niño predicted for California, said Callas. For good reason. Had the prediction occurred, the story could have been devastatingly different – and the MER team could not be the workaround champions in the realm of planetary science without being prepared for any thing and every thing.
On Mars, Opportunity, robotically undaunted, roved on, easily completing her investigation of Spirit Mound as the Sun set on October. “After finishing up measurements on some normal looking rocks, we decided to drive to top of Spirit Mound,” said Ray Arvidson, Deputy Principal Investigator, of Washington University St. Louis. “We wanted to look around and take images, just like we would if we were there in the field.”
As the ghosts and witches and goblins, the super heroes, creepy clowns and devils took to the streets on All Hallow’s Eve, Opportunity was near the top of Spirit Mound. In the quiet of Endeavour’s western rim, the robot field geologist looked out over Endeavour Crater and drank it in.
On leaving Marathon Valley, the rover hiked downhill to Spirit Mound in hopes of finding more of the most ancient Martian ground or bedrock as she descended, theoretically, back in geological time. The MER mission discovered this ancient ground in 2012 with bedrock dubbed Whitewater Lake at the base of Matijevic Hill, and identified and categorized as Matijevic Formation in 2013 in honor of rover pioneer Jake Matijevic, a member of the original design team at JPL and a former MER Chief Engineer. It was the oldest Martian ground any surface mission had ever discovered and the scientists have hypothesized that it dates back to the Noachian Period some 3.7 to 4.2 billion years ago.
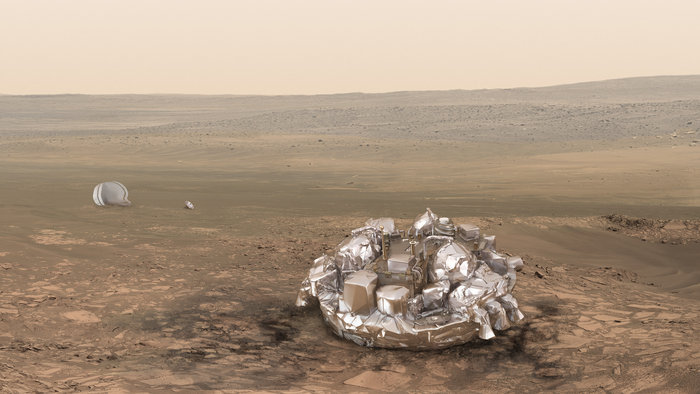
Artist impression of Schiaparelli
Schiaparelli was the Entry, Descent and Landing Demonstrator Module (EDM) of the ExoMars programme, a joint mission of the European Space Agency (ESA) and the Russian space agency Roscosmos. Built in Italy, it was intended to test technology for future soft landings on Mars’ surface. On Oct. 19, 2016, Schiaparelli entered the Martian atmosphere but crash-landed in a part of Meridiani Planum, not far from Opportunity. This scene shows the module, with the parachute and rear cover of the heat shield in approximate locations if all had gone according to plan.ESA/ATG medialab
Since then however, the rover hasn’t found any of the oldest Martian bedrock and the hope was once again dashed in October. “The rocks that we’ve analyzed at Spirit Mound are in family with the breccias that we have seen elsewhere on the rim, and certainly in Marathon Valley,” said Matt Golombek, MER Project Scientist at JPL. And, the veteran rover would not be venturing any further in Endeavour Crater at this point.
Even so, “it’s been a great month to be at this level in the rim, the lowest we’ve been for quite some time, and to establish the geology here,” Golombek said. “We’re pleased and ready to move on.”
Twelve years, nearly 10 months and counting, Opportunity dutifully awaits her commands. “The rover is doing wonderfully,” reported Bill Nelson, Chief of MER engineering at JPL. “Power is pretty good. We have had no memory problems since taking the rover’s Flash drive [non-volatile or long-term memory] offline and have been in RAM mode for the more than a year and we’re not experiencing any particular problems. We are extremely happy with the way things are running.”
As ESA picked up the pieces of Schiaparelli, metaphorically speaking, and focused on lessons learned, Opportunity continued the first overland expedition of Mars.
The notion that Opportunity roving is a gift is embedded now in the MER team’s “DNA.” But the rover and her team have logged so many milestones, they often get lost in the pipeline of news despite the fact that the intrepid rover’s achievements represent positive, thought-provoking good news in the turbulent and dirty seas of bad news cycles on Earth, especially those broadcasts of late in Opportunity’s home country on Earth.
Consider for example: Opportunity completed her 4500th hundred Martian day or sol of exploration in late September of this year. It’s just a number of course. But for this team and probably for history it’s a meaningful number. And Callas – who long, long ago spent many nights watching over the two MERs when they were still being assembled – was keeping track.
On that Martian day, September 20, 2016 on Earth, the MER mission “exceeded the prime-mission duration by a factor of 50," wrote Callas in an email of acknowledgment to the MER team. In that email, Callas also illuminated the wonders, the planetary and budgetary challenges to come, and what it will take to maintain this legendary mission as it roves toward the science of its lifetime on the planet to which we hope someday to send living, still breathing humans.
"We are now beginning our 10th extended mission for this 90-sol rover and the science ahead is some of the most compelling and first-of-a-kind since the surface mission began over twelve years ago,” Callas wrote. "We have known of water-carved channels and gullies on Mars ever since Mariner 9. Our species now has the chance to see a gully on Mars up close…
“Yet, the path forward is not easy. And, it never has been. Mars alone is a significant challenge. But we have challenges right down here on Earth. Regrettably, we have been experiencing ever decreasing project budgets, even though our exploration and scientific discovery continues at a remarkable pace. This coming fiscal year will be the smallest budget ever. You can't keep cutting resources without something eventually breaking. All of you have made mighty commitments to keep our exploration going, and you have done that again this year. In spite of these challenges, or maybe because of these challenges, all of you continue to excel and rise to the occasion to keep Opportunity productively exploring.”
The MER ops team has defined team effort and led by example from the very beginning, in various ways that have been covered over the years in the ‘pages’ of the MER Update. Team members – and, uncannily, the rover itself – represent the best of the human spirit, consistently demonstrating the value of working together and achieving the kind of greatness that only comes through unified collaboration.
If only politicians and governments could follow their example.
NASA / JPL-Caltech / Cornell / Arizona State University
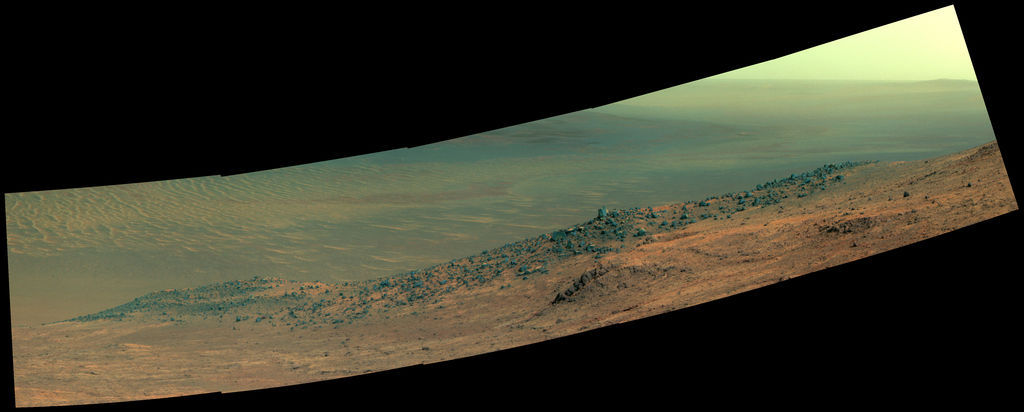
Wharton Ridge Panorama
On October 7, 2016, NASA and the Jet Propulsion Laboratory (JPL), home to all the American Mars rovers, issued the MER mission’s latest panorama named in honor of Robert A. Wharton (1951-2012). Heralded as an astrobiologist before the field officially came into existence, Wharton was a pioneer in the use of terrestrial analog environments, particularly in Antarctica, to study scientific problems related to the habitability of Mars. During his career, he also worked as a visiting senior scientist at NASA Headquarters; Research VP at the Desert Research Institute; Provost at Idaho State University; and President of the South Dakota School of Mines & Technology. The full extent of Wharton Ridge is visible, with the floor of Endeavour Crater beyond it and the far wall of the crater in the distant background. Near the right edge of the scene is the Lewis and Clark Gap, through which this rover crossed from Marathon Valley into Bitterroot Valley in September 2016. The scene is presented in enhanced color to make differences in surface materials more easily visible.When October dawned at Endeavour Crater, Opportunity was positioned over a target on the distinctive, linear, light-toned outcrop called Gasconade. Located on the western side of Spirit Mound, “kind of the foothills of Spirit Mound,” as Arvidson put it, the bedrock immediately beckoned the scientists.
As the month began, Opportunity was producing around 470 watt-hours of power under hazy skies, with an atmospheric opacity or Tau of 0.878. The rover’s solar array dust factor was good, 0.706, so she was utilizing about 70% of the sunlight hitting her solar panels. The rover had a total of 43.44 kilometers (26.99 miles) on her odometer – not bad for a rover that back in 2004 was to drive 600 meters to achieve mission success.
The multi-sol in-situ or contact campaign of a target on Gasconade that Opportunity started on Sol 4509 (September 29, 2016) extended through the first week of October. The rover conducted the routine science protocol, taking close-up pictures with her Microscopic Imager (MI) and sleuthing the chemical composition of the outcrop with her Alpha Particle X-ray Spectrometer (APXS).
From Sols 4512-4514 (October 2-4, 2016), the robot conducted fresh APXS offset placements on Gasconade and took additional MI mosaics, as well as aimed her Pancam at the surface target to take multi-spectral images.
Opportunity took the needed pictures for another MI mosaic of a target on a new offset section of Gasconade on Sol 4515 (October 5, 2016), and then placed the APXS on the spot for a multi-hour integration.
The next sol, Sol 4516 (October 6, 2016), the rover performed a small, 11-degree turn to set up for another surface target on Gasconade. And then Opportunity wrapped the first week of the month on Sol 4517 (October 7, 2016), following the science protocol of up-close examinations with the MI and APXS on that new surface target.

From Marathon Valley to the Gully
This map show a portion of Endeavour Crater's western rim that includes the Marathon Valley area that Opportunity investigated in 2015 and 2016, and a fluid-carved gully that is a major attraction destination to the south. Driving into this gully to learn more about that flow is one of the goals for a two-year mission extension that runs through 2018. The width of the area covered in the map is about 800 meters (about half a mile). Opportunity entered the northern end of the mapped area in January 2015 and entered Marathon Valley in July 2015. Tim Parker of JPL mapped the rover's traverse with a gold line onto an image from the High Resolution Imaging Science Experiment (HiRISE) camera on MRO. The route may not be visible without zooming into the image. North is up. The University of Arizona, Tucson, operates HiRISE, which was built by Ball Aerospace & Technologies Corp. of Boulder, Colorado.NASA / JPL-Caltech / Cornell / ASU
“Gasconade is interesting in that it appears to be a fracture zone on Spirit Mound,” said Arvidson. “It’s a little bit bright and has a fair amount of sulfur in it, so here we go again with fractures and ancient groundwater percolating up through the fractures and leaving behind sulfate deposits.”
That same sol, a Martian breeze cleared some of the accumulated, powdery dust from Opportunity’s solar panels, giving the solar-powered robot a bump in energy, upwards of 500 watt-hours. The atmospheric opacity or Tau was rising, to 0.907, but the rover’s solar array dust factor of 0.764 actually improved a bit.
During the second week of October, Opportunity took a Navigation Camera (Navcam) panorama of Spirit Mound on Sols 4518-4519 (October 8-9, 2016). The rover then backed up on Sol 4520 (October 10, 2016), just more than a meter to image the targets in the work volume of her arm or Instrument Deployment Device (IDD).
On Sol 4521 (October 11, 2016), Opportunity drove a short 1.9 meters (6.23 feet) to approach a new set of surface targets. Keeping with its Lewis and Clark / Corps of Discovery sites naming theme, the team dubbed the new target area Jefferson City, after a site that Lewis & Clark explored in 1804.
“We moved a little bit off to the right, but were still kind of on the edge of Spirit Mound, to make some of measurements of normal looking bedrock,” said Arvidson
There, parked amidst “normal looking bedrock,” the robot field geologist conducted another series of MI-APXS investigations of several targets, beginning with the first chosen target on Sol 4522 (October 12, 2016). The rover then offset her APXS relative to the initial target and on Sol 4524 (October 14, 2016) conducted further analysis of the chemical composition of the normal looking bedrock. Opportunity also took some Pancam panoramic images, as well as 13-filter of full color images of targets the scientists chose.
As the third week of October got underway, the rover continued the in-situ MI-APXS investigation of several targets in Jefferson City. But mostly the MER team turned its attention to preparing Opportunity to capture ESA’s Schiaparelli EDM.
“They were landing pretty close to us,” said Golombek. “Their ellipse was pretty close to our ellipse when Opportunity landed. But because the orbiters [Mars Odyssey and MRO] are on these north south passes, they either had to service the Europeans or us and not both.”
As a result of the MER mission’s support of Schiaparelli, Opportunity’s work slowed and the team wound up spending more time than they probably would have at Spirit Mound. “The European EDM ate our downlink, because the orbiters were servicing the ESA mission,” said Golombek. “Since we are in RAM mode, we can collect data, but can’t send it and can’t remember it. And when we did have a downlink, we wouldn’t have one on the next pass. We were reluctant to move the rover or the arm for fear that it might be left in some unknown state and we wouldn’t be able to diagnose it or figure it out for several days, until the next downlink. So basically, we spent more than a week in a kind of quiet, light remote sensing mode.”
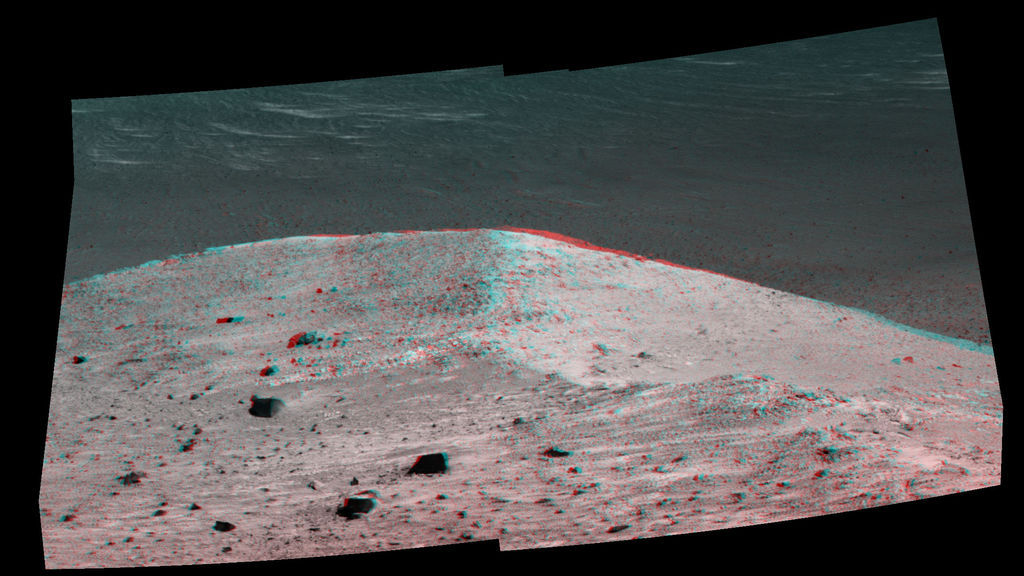
Spirit Mound 3D
Get your blue-red glasses on and check out this 3D image of Spirit Mound overlooking the floor of Endeavour Crater. The mound stands near the eastern end of Bitterroot Valley on the western rim of Endeavour Crater, and this view faces eastward. The image combines views from the left eye and right eye of Opportunity’s Pancam to appear three-dimensional when seen through blue-red glasses with the red lens on the left. For scale, the two rocks at lower center are each about 20 centimeters (about 8 inches) across. At the mound's crest line, the image covers an area about 8.5 meters (about 28 feet) wide.NASA / JPL-Caltech / Cornell / ASU
During that mode, Opportunity and her ground crew conducted two sets of dress rehearsals with the Pancam for imaging Schiaparelli’s arrival. “It took some time and we did allocate some more bandwidth to this effort,” said Callas. “At the time this was judged to be the right thing to do in order to capture this image.”
On Sol 4527 (October 18, 2016), Opportunity bumped back a little more than a meter (about 3 feet) to some new targets where she waited for Schiaparelli to arrive. The robot hunkered down there “to try and image the ESA lander’s parachute when it came down,” said Arvidson.
A few small bright features appeared in the rover’s workplane after she incidentally scuffed the area while turning for communication on that sol. The scientists wanted to at least quickly check them out, but there would be no time to do that until after Schiaparelli landed.
The following sol, the veteran robot field geologist and Martian photographer focused at the ready as Schiaparelli hit the Martian atmosphere. She was in position to image Schiaparelli’s parachute and she took multiple images. But the Pancam images of that effort show no sign of the European spacecraft or its parachute.
“Depending the actual ground tract – if Schiaparelli came in faster than expected or slower than expected or right on – about 70% of those possibilities were not visible for us, but there was a 30% chance, roughly one in three chance that the geometry would have been visible,” said Callas.
“The rim of Endeavour Crater obscures much of the western horizon and we only would have obtained images of the parachute if it kind of skewed to the east from where it was to be,” Arvidson added. “And the parachute in those images would be just 1 pixel [in size] in the Pancam frames.”
That noted, even if the geometry would have been positive, the contrast would be really tough to discern. For one thing, “The feature we would be trying to resolve would be over contrast at one end and under contrast in the other, so we imaged it in different filters hoping we would see either would we see a light pixel or dark pixel,” expounded Callas. “It was iffy at best, but it was worth the shot.”
NASA / JPL-Caltech
Godzilla of dust storms coming?
James Shirley, a planetary scientist at JPL, has been studying dust storms on Mars and in early October 2016 announced that based on historical patterns a monster or planet-circling dust storm may kick up on Mars in the next couple of months. In his paper, “Solar System dynamics and global-scale dust storms on Mars,” published in Icarus, in May 2015, he cited conditions in the current Mars dust-storm season as being “very similar” to those for a number of years when global storms occurred in the past. This graphic illustrates his findings, and a similarity between 2016 (dark blue line) and five past years in which Mars has experienced a global dust storm (orange lines and band), compared to years with no global dust storm (blue-green lines and band). The arrow nearly midway across in the dark blue line indicates the Mars time of year in late September 2016. A key factor in the graph is the orbital angular momentum of Mars, which would be steady in a system of only one planet orbiting the Sun, but varies due to relatively small effects of having other planets in the solar system.The landing of another spacecraft on Mars would have been a very cool thing to capture. Additionally, the images “would have also helped refine the geometry of the entry, so when they do the reconstruction of the orbit, if they had been successful, we could have given them a tie point on the sky,” said Callas. [A tie point is a point that has ground coordinates that are not known, but is visually recognizable in the overlap area between two or more images.]
As valiant as Schiaparelli’s entry was and Opportunity’s attempt to capture Schiaparelli’s landing was, neither happened. When NASA released the HiRISE images that showed Schiaparelli and its parachute two days later, a crash landing, which so many in the planetary exploration community suspected after the signal was lost, was all but confirmed.
Subsequent updated data indicated that the lander – named for Italian astronomer Giovanni Virginio Schiaparelli (1835-1910), a leading astronomer and science historian in his day – didn’t even come into view of the camera. For both Schiaparelli and for Opportunity capturing the landing, “it was a long shot,” said Arvidson. “In the end, it was a null, but at least we tried.”
Since the MER mission relinquished much of its relay support to the Schiaparelli EDM, Opportunity continued through Sol 4533 (October 24, 2016) working a science light, remote sensing campaign, which included one overnight APXS argon integration. Overall though, giving up downlinks wasn’t “too big an impact for us,” Callas said. “We had already planned the reallocation of some of the relay passes, and there were a few uncovered relay passes that we supplemented with direct-to-Earth links.”

Gasconade up close
Opportunity took these images of the linear, light-toned outcrop called Gasconade with her Pancam on Sol 4520 or Oct. 10, 2016. The Pancam team processed the top view in true color and the one just below it in false color. It is easy to see in these images, each showing exactly the same section of the outcrop, how the technique of processing Pancam images in false color helps scientists distinguish geological components in a given scene. “Gasconade appears to be a fracture zone,” said MER Deputy Principal Investigator Ray Arvidson, of Washington University St. Louis. “It’s bright and has a fair amount of sulfur in it, so here we go again with fractures and ancient groundwater percolating up through the fractures and leaving behind sulfate deposits.”NASA / JPL-Caltech / Cornell / ASU
By Sol 4534 (October 26, 2016), Opportunity was back to normal operations. The rover’s first assignment was to check out the small bright pebble or cobbles, as some scientists describe them, that appeared in the rover’s workplane following her incidental wheel scuffing during a turn for communication on Sol 4527 (October 18, 2016).
“When we moved the rover before the European spacecraft arrived, we noticed a series of light-toned pebbles,” said Golombek. The team nicknamed these little stones Lupus, after a site not far from Jefferson City, along the Missouri River, which Lewis & Clark explored.
Opportunity followed the science protocol, taking the pictures for a MI mosaic of the target at Lupus, and then placing her APXS on an offset target on Sol 4536 (October 27, 2016). “We APXS-ed those pebbles and we don’t have results yet,” said Golombek at month’s end.
The rover continued over the next few sols to take Pancam and Navigation Camera (Navcam) pictures. But as October was passing into All Hallow’s Eve, Opportunity pressed on, driving toward the summit of Spirit Mound. “The scientists wanted to look at the back side, but driving around the mound to get to the backside to image it would have required driving on slopes we’re just not comfortable with driving on,” said Nelson.
Instead, the plan changed to driving up to the summit and peeking over the top. The idea is to go up to the top of Spirit Mound and look down the other side to get an idea of what the regional geology looks like from the top of the mound,” Golombek said.
To that end, Opportunity drove 5.44 meters, on Sol 4538 (October 29, 2014), making a U-turn to circle around a potentially problematic rock. “The rover made about 1.5 to 2 meters forward progress toward the summit on that drive,” said Nelson. “It turned out it was close enough to the summit that the scientists didn’t feel the need to drive further.”
In other rover engineering business, a readout of the rover's EEPROM (non-volatile memory called electrically erasable programmable read-only memory) was successfully returned to Earth on Sol 4539 (October 30, 2016). This readout will be used to update the testbed rovers on the ground so that the testbed rovers will be more accurately configured like Opportunity.
Once Opportunity is done with her assignment at the summit of Spirit Mound, the MER mission will drive on. The plan as of October’s end was for Opportunity to pull out during the first week in November.
“The intent at Spirit Mound was to get as lowest section that we could access on the rim as we could to see if we could find Matijevic Formation and we did that in October,” said Golombek. “This is as low on the rim as we are prepared to go. If we went any lower, we wouldn’t be able to get back out. It would be too steep. So far we have not found any Matijevic rocks.
From Spirit Mound, Opportunity will continue off to the south and west exploring the rim of Cape Tribulation. “We will be heading southwest to go back up through the rim, said Arvidson. “Eventually we’ll climb out of the rim on the west side, the side we’ve been on all along,” continued Golombek. “We’ll keep our eyes open for sure for Matijevic rocks, but we’re heading out soon and generally heading for the gully in Cape Byron.”
Halloween View
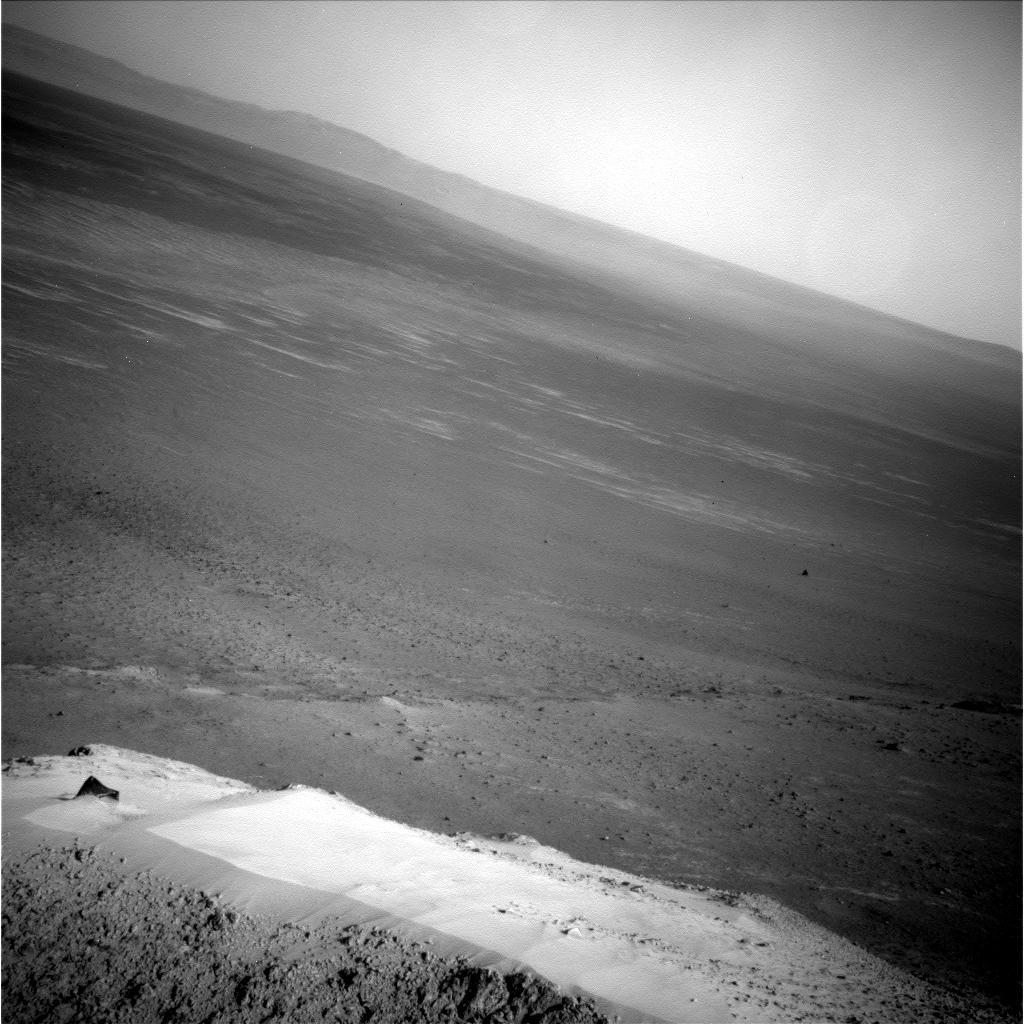
Opportunity woke up on Halloween morning on Mars to this view looking into Endeavour Crater from the top of Spirit Mound, the northeast rim Endeavour Crater in the distance. The rover captured the view in an image she took with her Pancam on Sol 4539 (Oct. 30, 2016). The linear bright patch in the lower part of the image is composed of wind-blown sands. The horizon is tilted because the rover was tilted.NASA / JPL-Caltech / Cornell / ASU
The centerpiece of the extended mission, the gully will likely provide Opportunity and the MER team with significant discoveries. The rover’s work there will mark the first time a surface mission on Mars has investigated a liquid-carved gully up close and whatever she finds, it will reveal something more about past water on the Red Planet.
In the meantime, there are plenty of things to investigate as the rover roves toward Cape Byron and the gully, which is still around 900 meters (about 0.56 of mile) away as the “Martian crow” might fly, and probably closer to around 1500 meters (0.932 of a mile) by the drive route, according to Arvidson.
The plan now calls for Opportunity to image more mounds that look similar to Spirit Mound, as well as take close looks at bedrock at the top of Endeavour’s western rim and other areas where the scientists in orbital images can see bedrock worth inspecting, bedrock that could be perhaps Matijevic or more Shoemaker Formation strata. Other discoveries and sites will no doubt be found on this discovery driven mission as the rover roves onward to the gully and beyond.
The skies have become dustier in October, but as November peeks over the horizon, the future is still bright for Opportunity and the MER mission. The rover has a total log of 43.45 kilometers (26.99 miles) on her odometer and was producing upwards of around 390 watt-hours as the eerie creatures of All Hallow’s Eve took to streets around the world. The Tau was fluctuating from 0.954 to 0.960, but the rover’s solar array dust factor of 0.711 was holding strong.
“We’ve had a little bit of Tau run-up, from.6 to about .9, which has had some impact on us, but it’s not severe,” said Nelson. “It’s roughly equivalent to a smoggy day in LA or light overcast. Past that, there is just nothing right now to point to as far as problems go. We are coming up to Summer Solstice and things are still going pretty good.”
Perhaps best of all, Mars was continuing to cooperate. Despite the historical pattern and the recent prediction, no major dust storms kicked up in October. Just another month or two to go and the breathing will be easier.
“Opportunity,” summed up Callas, “is the same old good story.”

NASA / JPL-Caltech / Cornell / Arizona State University
Spirit at the Edge of Endeavour
Opportunity took this image of Spirit Mound with her Panoramic Camera (Pancam) on Sep. 21, 2016. The view overlooks the floor of Endeavour Crater. The mound stands near the eastern end of Bitterroot Valley on the western rim of Endeavour, and this view faces eastward. The veteran robot field geologist is slated to depart Spirit Mound for good in November 2016.Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate