
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


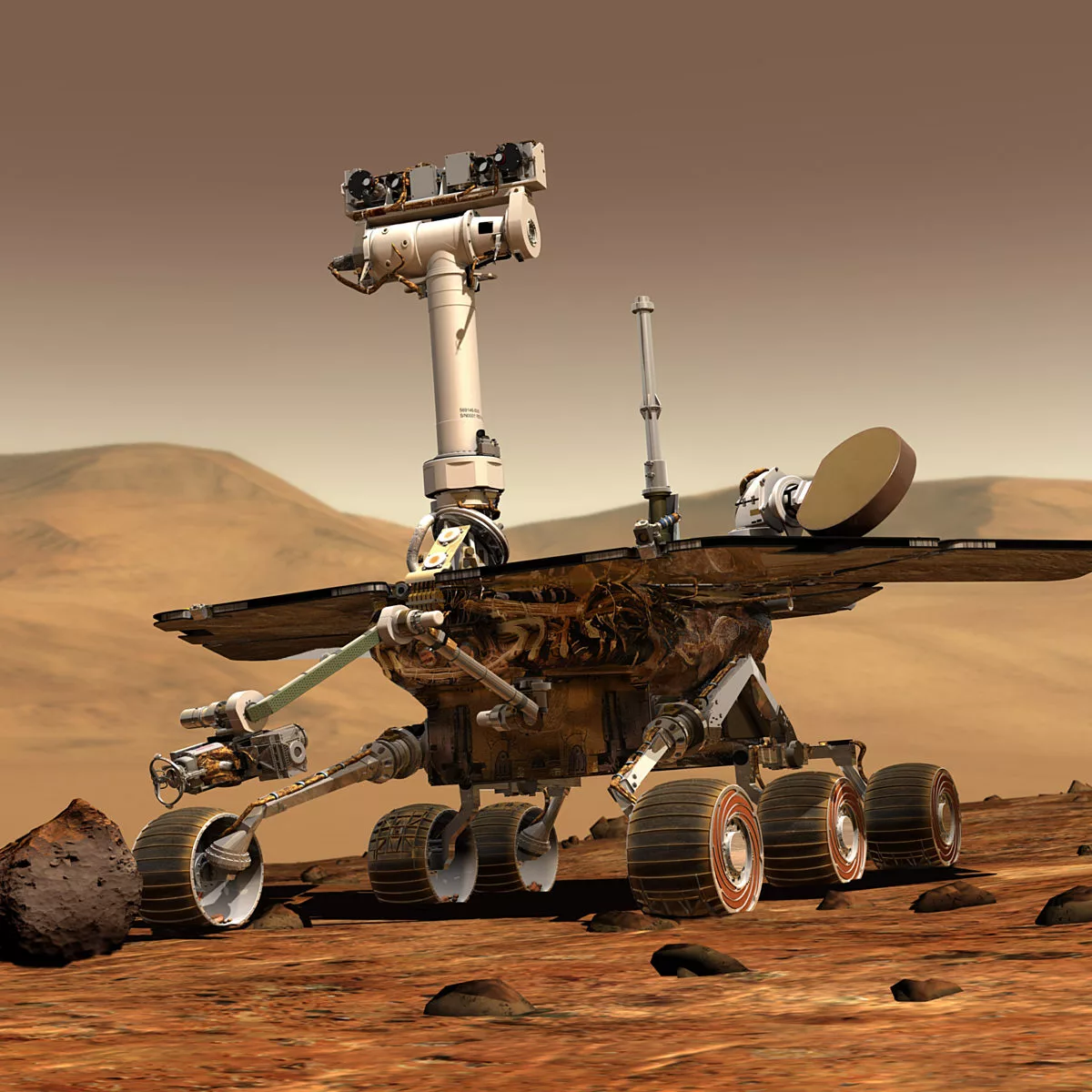
The twin Mars Exploration Rovers (MER), Spirit and Opportunity, were robot field geologists. They confirmed liquid water once flowed across the Martian surface. Both long outlasted their planned 90-day lifetimes. Following their landings on 3 and 24 January 2004, Spirit drove 7.73 kilometers and worked for 2210 sols (Martian days), until 22 March 2010. Opportunity drove 45.16 kilometers and worked for at least 5111 sols; the rover stopped responding on 10 June 2018, and the mission was declared over on 13 February 2019.
Pictures taken from the rovers’ stereoscopic cameras captivated the public, giving us the feeling that we were standing on Mars. Before the landing, principal investigator Steve Squyres made the revolutionary decision of sharing all the rovers’ photos with the public as soon as they arrived on Earth. Because of that generosity, rover fans could follow the day-to-day adventures of Spirit and Opportunity in near real-time.
The names Spirit and Opportunity were selected by NASA in a student essay contest that drew nearly 10,000 entries, sponsored by The Planetary Society and LEGO. The Society and LEGO also provided DVDs carrying the names of 4 million people. The DVDs remain in Gusev crater and on Meridiani planum as testaments to public love for Mars exploration.
The Mars Exploration Rovers Update Archives
A one-of-a-kind mission history of the Mars Exploration Rovers Spirit and Opportunity, spanning from 2004 to 2019. Journalist A.J.S. Rayl captured every discovery, every success, and every challenge by these twin rovers and their team here on Earth.


Mission objectives
The Mars Exploration Rovers mission set out to achieve 7 primary science objectives, which both Spirit and Opportunity achieved by the end of April 2004, within their 90-day primary missions:
- Searching for and studying many different types of rocks and soils that might hold clues to past water activity.
- Producing maps showing the locations of different kinds of rocks and soils around the landing sites.
- Determining what forces have shaped the landscape and how they created the landscape.
- Examining places on the ground observed from orbiting spacecraft or, in other words, “ground truthing.”
- Studying iron-containing minerals and uncovering minerals that contain water or must have formed in water.
- Identifying the minerals and textures in rocks and soils and determining how they were made.
- Searching for clues to what the environment was like when liquid water was present, whether the water was present for a long time or not, and whether the environment could have supported life.
In Gusev crater, Spirit found evidence for both past and present water cycles. The rocks of the Columbia Hills had their minerals altered by percolating groundwater. Home Plate is the eroded remnant of an ancient volcanic fumarole, or opening, featuring hot springs of chemical-rich water like those in Yellowstone National Park. Dragging its wheel through the sand around Home Plate, Spirit turned up soils made of different layers of minerals. These layers were separated from each other in the geologically recent past, when thin films of water trickled in to the soil, dissolving some minerals and leaving less soluble ones behind.
At Meridiani planum, Opportunity was the first mission to study intact sedimentary rocks on Mars. It examined tiny spheres of hematite, dubbed “blueberries,” and layered bedrock, to determine the geologic history of the region. The visual and chemical evidence suggests that a large, salty body of water once pooled on the surface, sometimes evaporating to form sulfate-rich sands that were eroded and redeposited by wind in a desert environment, and later altered by groundwater. In 2011, after nearly 20 kilometers of driving among sand ripples, Opportunity reached much older rocks in the eroded rim of an ancient crater named Endeavour. The rover had lost two of its four science instruments and was plagued with memory problems, but with help from Mars Reconnaissance Orbiter, it found evidence of more benign, wet environments in Mars’ even more distant past.
Spirit (2004-2011)
"Our job was to wear these rovers out exploring, to leave no
unutilized capability on the surface of Mars, and for Spirit, we have
done that."
— John Callas, MER project manager, 2011
Spirit major mission events
- Landed 4 Jan 2004 | sol 1
- 6 wheels on soil 15 Jan 2004 | sol 12
- Sol 18 anomaly 21 Jan 2004 | sol 18
- Distant hills named for Apollo 1 crew 28 Jan 2004
- Reformatted flash memory 5 Feb 2004 | sol 32
- Discovery of evidence for groundwater alteration at Humphrey 28 Feb 2004 | sol 55
- Arrived at Bonneville crater, seeing no sedimentary rocks 10 Mar 2004 | sol 66
- Right front wheel drive actuator draws steadily increasing current 5 May-10 Jun 2004 sols 120-155
- Arrived at West Spur (foot of Columbia Hills) 11 Jun 2004 | sol 156
- Studied “Pot of Gold” rotted rock, discovers hematite 16 Jun 2004 | sols 161-172
- Wheels on bedrock for the first time; switch to primarily 5-wheel driving around 16 Jul 2004 | sol 190
- Mountain-climbed atop Clovis, later finding minerals containing bromine, sulfur, and chlorine as well as goethite 31 Jul 2004 | sol 205
- Intermittent dynamic brake fault on left front and right rear wheels 1 and 13 Oct | sols 265 and 277 (more)
- During climb up West Spur of Husband Hill, continuing evidence of volcanic rocks altered by groundwater at Tikal, Tetl, Uchben, Palenque, Lutefisk
- Suring climb up Cumberland Ridge toward Husband Hill peak, examined Wishstone, a clearly clastic phosphorus-rich rock beginning 10 Dec 2004 | sol 333
- Reached Paso Robles salt-rich site & began exploring Larry’s Lookout sol 16 Feb 2005 | 399
- Last RAT grind of Spirit mission (head worn down after 15 grinds) sol 416
- First-ever photo of Martian dust devils 10 Mar 2005 | sol 421
- Arrived at Methuselah outcrop; scientists begin making sense of Columbia Hills geologic story 15 Apr 2005 | sol 456
- Began final Husband Hill ascent sol 515
- Husband Hill summit reached 30 Sep 2005 | sol 619
- Descent down Haskin ridge toward Inner Basin and Home Plate; Comanche site reached 19 Dec 2005 | sol 697
- El Dorado basalt dune field reached 26 Dec 2005 | sol 706
- Wheels slipped into bright soil at Arad, which turns out to be rich in sulfate salts like that at Paso Robles 10 Jan 2006 | sol 719
- Recurrence of dynamic brake fault; temporary halt in use of left front and right rear steering motors 25 Jan 2006 | sol 733
- Arrived at Home Plate, quickly determining it was volcanic 5 Feb 2006 | sol 744
- Right front wheel drive actuator failed 13 Mar 2006 | sol 779
- Wheels dug into bright soil at Tyrone 16 Mar 2006 | sol 782
- Winter at Low Ridge Haven 9 Apr-3 Dec 2006 | sols 805-1037
- Dust storm limits activity 29 Dec 2006-4 Jan 2007 | sols 1062-1068
- Drove on toward Mitcheltree Ridge east of Home Plate 26 Jan 2007 | sol 1089
- Began studying outcrops on east side of Home Plate 27 Mar 2007 | sol 1148
- Driving in Silica Valley, wheel exposed bright silica-rich soils at Gertrude Weise, confirming volcanic origin 30 Apr 2007 | sol 1181
- Possible direct hit from a dust devil 13 Jun 2004 | sol 1224
- Parked at Innocent Bystander during global dust storm 10 Jul-23 Aug 2007 | sols 1250-1293
- Climbed atop Home Plate 6 Sep 2007 | sol 1306
- Trapped at Tartarus 15-29 Nov 2007 | sols 1375-1388
- Winter at Winter Haven 3 14 Dec 2007-7 Jan 2009 | sols 1403-1782
- “Sasquatch” or “Teeny Little Bigfoot” brouhaha Jan 2008
- Dust storm results in dangerously low power levels 8 Nov 2008 | sol 1725
- Odd “amnesia” memory problems 26 Jan 2009 | sol 1800
- Failed attempts to climb onto Home Plate 3 Feb-17 Mar 2009 | sols 1809-1850; decision to drive around west side of Home Plate
- Exposed nearly pure silica at Kit Carson 29 Mar 2009 | sol 1861
- Stuck at Troy 8 Apr 2009 | sol 1871 but at least the science is good at Ulysses
- Recurrence of odd memory faults and “amnesia” beginning 9 Apr 2009 | sol 1872
- Halt driving attempts on Mars; ramp up test work on Earth to determine extrication strategy 8 May 2009 | sol 1900
- Self-portrait under belly to determine condition of wheels 2 June 2009 | sol 1925
- Extrication efforts begin 17 Nov 2009 | sol 2088
- Right rear wheel motor fails 28 Nov 2009 | sol 2099
- Spirit declared a stationary lander (despite continuation of extrication attempts) 26 Jan 2010
- Last drive attempt 8 Feb 2010 | sol 2169
- Last contact 22 Mar 2010 | sol 2210
- End of mission declared 25 May 2011
Peer-reviewed papers detailing Spirit mission events
- Larry Crumpler et al. (2005): sols 1-150, landing to the base of the Columbia Hills (paywalled)
- Ray Arvidson et al. (2006): sols 1-512, landing through Larry’s Lookout on the way up Husband Hill
- Ray Arvidson et al. (2008): sols 513-1476, Cumberland Ridge to Winter Haven 3
- Ray Arvidson et al. (2010): sols 1410-2169, remaining science mission at Home Plate
Opportunity (2004-2018)
"Just think of some of the things that have happened back on Earth
[during Opportunity's mission]. The entire Obama Presidency. The entire
existence of Facebook. The Boston Red Sox winning the World Series three
times! We've been on Mars a very long time."
—Steve Squyres, MER principal investigator, 2016
Opportunity major mission events
- Landed 25 Jan 2004 | sol 1
- Arm heater determined to be stuck in “on” position 28 Jan 2004 | sol 4
- 6 wheels on soil 31 Jan | sol 7
- Exited Eagle crater and announced that Meridiani planum was once a salty sea 22 Mar 2004 | sol 57
- Arrived at Endurance crater 30 Apr 2004 | sol 95
- Arrived at heat shield 23 Dec 2004 | sol 325
- Right front wheel steering motor failed 7 Apr 2005 | sol 433
- Got stuck in sand at Purgatory Ripple 26 Apr 2005 | sol 446
- Arrived at Erebus crater 23 Sep 2005 | sol 592
- Publication of 9 articles in special issue of Earth and Planetary Science Letters synthesizing Opportunity results 30 Nov 2005
- Departed Erebus crater 17 Mar 2006 | sol 762
- Arrived at Victoria crater 27 Sep 2006 | sol 951
- Grind motor encoder failure on RAT 1 Jan 2007 | sol 1045
- Drive halt & mini-TES lost due to global dust storm that began 12 Jul 2007 | sol 1232
- Entered Victoria crater 11 Sep 2007 | sol 1291
- Revolve motor encoder failure on RAT 25 Oct 2007 | sol 1334
- Shoulder azimuth motor failure 15 Apr 2008 | sol 1502
- Exited Victoria crater 29 Aug 2008 sol 1634
- Endeavour crater goal (18 km away) announced 22 Sep 2008
- Departed Victoria crater 18 Oct 2008 | sol 1683
- Right front wheel overheating 10 Feb 2009 | sol 1795
- AEGIS autonomous targeting software debuted 4 Mar 2010 | sol 2172
- Turned eastward toward Endeavour crater 26 May 2010 | sol 2252
- Arrived at Santa Maria crater 15 Dec 2010 | sol 2450
- Drove onto Cape York at Endeavour crater/Cape York 9 Aug 2011 | sol 2681
- Stopped for winter at Greeley Haven 5 Dec 2011-8 May 2012 | sols 2795-2946
- Mössbauer spectrometer takes final data (too weak for further use) 29 Feb 2012 | sol 2879
- Discovery of smectite clay at Whitewater Lake Sep 2012 | after sol 3071
- Drove off Cape York 22 May 2013 | sol 3315
- Arrived at Solander Point 4 Aug 2013 | sol 3387
- Stopped for winter at Cook Haven 10 Dec 2013-10 Mar 2014 sols 3512-3599
- Science paper published on ancient aqueous environments at Endeavour crater 24 Jan 2014
- Set off-planet distance record of 39.22 km 24 Apr 2014 | sol 3644
- Dramatic increase in warm reboots due to flash memory problems beginning 8 Aug 2014 | sol 3746
- Ended use of flash memory 11 Dec 2014
- Resumed use of flash memory 21 Mar 2015 | sol 3966
- Entered Marathon Valley (entering Endeavour crater) 15 Jul 2015 | sol 4078
- Continued reboots require permanent switch to volatile memory 17 Nov 2015 | sol 4200
- Departed Marathon Valley 2 Sep 2016 | sol 4482
- Exited Endeavour crater, returning to Cape Tribulation, 3 Mar 2017 | sol 4659
- Arrived at top of Perseverance Valley 5 May 2017 | sol 4720
- Left front wheel steering motor failure 4 Jun 2017 | sol 4750
- Entered Perseverance Valley 6 Jul 2017 | sol 4781
- Took “selfie” to celebrate 5000th sol 16 Feb 2018 | sol 5000
- Contact lost during dust storm 10 Jun 2018 | sol 5111
Peer-reviewed papers detailing Opportunity mission events
- Steve Squyres et al. (2006): sols 1-511, landing to Purgatory
- Ray Arvidson et al. (2011): sols 511-2300, Purgatory to Endeavour
- (Squyres and Arvidson are no doubt working on a paper about the Endeavour phase of the mission.)
Landing sites
The two rovers landed nearly on opposite sides of Mars, a fact that facilitated mission operations and communications planning.

More about the landing site selection (Golombek et al. 2003) and localization (Parker et al. 2004) for both rovers
Spirit landed on the flat floor of Gusev crater at 14.5692°S, 175.4729°E. Gusev is a 160-kilometer-diameter impact crater with a flat floor and subdued peaks. Ma’adim vallis, an 800-kilometer-long outflow channel, enters it from the south and exits it from the north, making it a near-certainty that water once ponded in Gusev. Once Spirit landed, science team members discovered that any sediments that might have been deposited in Gusev’s floor were later covered by volcanic deposits, so they took the rover to the Columbia hills in search of more ancient rocks.

Spirit rover localization (Li et al. 2006) | Phil Stooke’s Spirit route maps (book)
Opportunity landed within Meridiani planum at 1.948282°S, 354.47417°E. Meridiani planum contained large deposits of a dark-colored water-related mineral called hematite that were visible from orbit, as well as light-colored layered rocks. During its airbag-assisted landing, Opportunity fortuitously rolled into the 20-meter-diameter Eagle crater, which had punched a hole into the surface and exposed layered bedrock. Following work at Eagle, Opportunity embarked on a 15-year journey covering 44 kilometers of Meridiani planum and the rim of Endeavour crater, setting a distance record that is not likely to be broken on Mars for many years to come.


Rover dimensions: 1.5 meters from bottom of wheels to top of mast; 2.3 meters wingtip to wingtip; 1.6 meters front to back
Mass: 1,062 kg at launch (including 183 kg cruise stage, 52 kg propellant, 198 kg backshell and parachute, 90 kg heat shield, 365 kg lander, 174 kg rover)
Power: Bat-shaped solar panels that recharged lithium-ion batteries, providing a peak of 140 watts at landing time, up to 900 watt hours per sol
Cost: Total: $1.086 billion ($645 million spacecraft development and science instruments; $100 million launch; $75 million prime mission operations, $266 million extended operations)
More: Mission press kit | Mission overview by Crisp et al. (2003)

Cost of the Mars Exploration Rovers
The total cost of the Mars Exploration Rovers program was $1.08 billion. But that's not the whole story.
Spacecraft instruments and tools
Panoramic Camera (Pancams): High-resolution, stereo, color cameras mounted at the top of each rover’s mast. They helped the team select rock and soil targets for intensive examination, pick new regions to explore, and create panoramic views by taking many images for mosaicking together. Each camera has an 8-filter wheel containing visible, infrared, and solar neutral density filters for color (RGB or false color), spectral analyses of minerals and atmosphere, and solar imaging. Monochrome detectors, 1,024 pixels square, FOV 16x16°, pixel size 0.27 mrad, spectral range 400-1100nm, stereo separation 30 cm. Principal investigator: James F. Bell III. Pancam website | Bell et al. (2003)
Microscopic Imager (MI): Monochrome camera mounted on the robotic arm. Allows each rover to take very close-up images of the surface of rocks or soils, seeing features as small as 0.1 mm across, providing clues to how those rocks and soils were formed. The MI was aided by the use of the Rock Abrasion Tool (RAT) to expose fresh rock surfaces. It had a very shallow depth of field (±3mm), so it commonly took many images at different distances that could be “focus merged” on the ground. Monochrome detector, 1,024 pixels square, 31mm FOV when in focus, pixel size 30 microns when in focus, spectral range 400-700 nm. Pancam images taken of MI targets have about 60 pixels across the MI field of view to provide color information. Principal investigator: Kenneth Herkenhoff. Herkenhoff et al. (2003)
Engineering cameras: Navigation cameras (Navcams) and Hazard avoidance cameras (Hazcams): Stereo, monochrome, wide-angle camera systems that provide the rover and its drivers with 3D information about the terrain in which the rover is operating. The Navcams weremounted at the top of the mast, and were steerable to 360° around the rover and +90°/-104° elevation, with a 45° FOV. Forward and rear Hazcams were fixed to the body of the rover just beneath the solar panels, boresighted 45° below the rover deck (front) and 35° (rear), and had a 124° FOV. Monochrome detectors, 1,024 pixels square, spectral range 600-800 nm. Team leader: Justin Maki. Maki et al. (2003)
Miniature Thermal Emission Spectrometer (Mini-TES): Using the rover’s tubular mast as a periscope, Mini-TES recorded the thermal spectra of various rocks and soils to determine the types and amounts of minerals they contained, detecting radiation in 167 different infrared “colors.” The instrument itself sat inside the body of the rover, surveying the landscape using a tiltable mirror within the mast head for the vertical direction and panning of the mast head for the horizontal direction. Design heritage from the Thermal Emission Spectrometer aboard the Mars Global Surveyor spacecraft. Opportunity’s Mini-TES failed after its mirror was contaminated during the dust storm of summer 2007. Spectral range: 5–29 μm (339.50 to 1997.06 cm−1) with a spectral sample interval of 9.99 cm−1. Spot size 20 mrad (about 75 Pancam pixels). Principal investigator: Philip Christensen. Christensen et al. (2003)
Mössbauer spectrometer (MB): Mounted on the arm, MB sensitively detected the presence and abundance of iron-bearing minerals. It used a radioactive cobalt (57Co) source to generate gamma rays that were absorbed and then emitted by iron atoms in the target at slightly different wavelengths depending on the crystal structure in which the iron sat. Observations took hours so were typically performed overnight (or over many days). Because the half-life of 57Co is only 271 days, the performance of the Mössbauer degraded over time, requiring longer and longer integrations; Spirit’s was used until the end, but longer-lasting Opportunity’s became useless after sol 2879. Principal investigator: Göstar Klingelhöfer. Klingelhöfer et al. (2003)
Alpha Particle X-Ray Spectrometer (APXS): Mounted on the arm, APXS detected the elemental composition within the top few micrometers of rock and soil targets. It used alpha-particle and X-ray sources (radioactive curium, 244Cm) to irradiate the target and measured the wavelengths X-rays that were emitted in return. Observations were best quality when done overnight, but major elements could be detected in a few hours with “touch and go” observations. With a half-life of 18.1 years, the curium sources did not decay enough during the missions to affect data quality. Very similar to APXS instruments on Mars Pathfinder and Curiosity. Principal investigator: Rudi Reider. Reider et al. (2003)
Rock Abrasion Tool (RAT): Multipurpose brush/grinding/drilling tool for cleaning rock surfaces and exposing freshly cut mineral faces prior to imaging and spectrometry. Holes were 45 mm diameter, 5 mm or more deep. Grinding teeth on Spirit’s RAT wore down after 15 grinds (sol 416) though the brush was still useful. Opportunity’s landing site’s rocks were softer, so RAT functioned until the end. Team leader: Steve Gorevan. Gorevan et al. (2003)
The magnet array was a group of magnets mounted on the front of each rover, on the rover deck, and inside the RAT. They gathered magnetic particles for examination with the rover's cameras and spectrometers. Since magnetic minerals carried in dust could have formed in watery environments, scientists were interested in the composition of Martian dust. Team leader: Marten Madsen. Madsen et al. (2003)
A MarsDial (a Martian sundial) was mounted to each rover deck, to help the Pancam team calibrate the color and brightness of their images. It featured three gray regions and four colored regions, as well as a vertical post that casted a shadow across part of all three gray regions at some time between 10:00 a.m. and 2:00 p.m. (local Mars time) every day. They remained useful for calibration throughout the mission despite accumulation—and blowing away—of dust. MarsDial design
Useful resources
Rover images
- Raw and press-released images at JPL website
- Processed images at the Pancam website
- Damia Bouic’s gallery
- Raw images at Mike Howard’s midnightplanets.com
Operational mission information
- JPL rover status updates
- JPL press releases
- MER Analyst’s notebook (includes mission manager and science team notes)
- Scott Maxwell’s “Mars and Me” blog
Other tools
- Mars24 Mars sunclock application
- MER image filename-to-metadata converter
- MER photogrammetric range finder
Key peer-reviewed papers
Note: The Mars Exploration Rover team publishes many of their papers in the American Geophysical Union’s Journal of Geophysical Research, which makes all papers open-access 24 months after publication.
Mission overviews
- Joy Crisp et al. (2003): Mission overview
- Steven Squyres et al. (2003): Science overview
- Matt Golombek et al. (2003): Landing site selection
- Janet Vertesi (2015): Seeing Like a Rover: Sociology of the rover mission (academic book)
- Steven Squyres (2005): Roving Mars: Memoir (popular book)
Science results (both rovers)
- Mark Lemmon et al. (2014): MER meteorology (paywalled)
- Ray Arvidson (2015): Review article on the history of water on Mars from landed missions
Spirit mission science results
- Steven Squyres et al. (2004): First results (paywalled)
- Ron Greeley et al. (2006): Dust devils
- Doug Ming et al. (2006): Evidence for water on Mars in the Columbia Hills
- Nathalie Cabrol et al. (2006): More evidence for water in the Columbia Hills
- Steven Squyres et al. (2007): Home Plate was a site of explosive volcanism (paywalled)
- Timothy McCoy et al. (2008): Geology of Husband Hill
- Steven Squyres et al. (2008): Silica-rich deposits around Home Plate (paywalled)
- Kevin Lewis et al. (2008): Geology of Home Plate
- Melissa Rice et al. (2009): Using Pancam to find water-related minerals (paywalled)
- Richard Morris et al. (2010): Spirit found carbonate minerals (paywalled)
- Steven Ruff et al. (2014): Gusev crater held an ephemeral lake (paywalled)
- Ken Herkenhoff et al. (2006 and 2018): Everything from the Microscopic Imager
Opportunity mission science results
- Steven Squyres et al. (2004): First results (paywalled)
- Göstar Klingelhöfer et al. (2004): Water-related minerals at Meridiani Planum (paywalled)
- Andrew Knoll et al. (2004): Meridani Planum was habitable (paywalled)
- John Grotzinger et al. (2004): Geology of Meridiani Planum (paywalled)
- Scott McLennan et al. (2004): What sediment made the Meridiani rocks, and what turned it into rock? (paywalled)
- Richard Morris et al. (2004): Hematite spherules at Mauna Kea are like the ones at Meridiani (paywalled)
- Ray Arvidson et al. (2006): What are the blueberries, and where did they come from?
- Steven Squyres et al. (2006): Results from the first 2 years of the mission (paywalled)
- Wendy Calvin et al. (2008): More blueberry science
- Steven Squyres et al. (2009): Results from Victoria Crater (paywalled)
- Joel Hurowitz et al. (2010): What the Meridiani rocks have to say about ancient Mars atmosphere (paywalled)
- Steven Squyres et al. (2012): First results from Endeavour crater: water was involved (paywalled)
- Matt Golombek et al. (2014): What small craters in the plains tell us about modern Mars
- Arvidson et al. (2014): More watery results from Endeavour crater (paywalled)
- Larry Crumpler et al. (2015): Watery geology of Endeavour crater
- Valerie Fox et al. (2016): Seeing clays at Endeavour from space
- Christian Schröder et al. (2016): Meridiani meteorites
- David Mittlefehldt et al. (2018): Lots of different stuff happened to Endeavour’s rocks
- Fraeman et al. (2018): Commentary and context on what Opportunity has seen at Endeavour