
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Opportunity Soldiers through Martian March Madness
Sols 4303 - 4331

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
April 4, 2016
Mars Exploration Rover
NASA / JPL-Caltech / Maas Digital
As March Madness on Earth sent sports fans into their annual kinetic frenzy watching more than 60 American teams battle it out for college basketball’s grandest title, Opportunity was experiencing her own Martian brand of March Madness. The pace may have been slower and her skill, tenacity, talent, and frustration weren’t displayed on national television, but for some robot fans, the rover’s valiant determination to reach a certain bedrock target may, actually, have been even more exciting.
On a steep slope of Knudsen Ridge in Marathon Valley, the Mars Exploration Rover (MER) pushed the limits of her human-given capability with a resolve that had everyone following her adventures and her ops team marveling. Opportunity was taking on tough terrain, a rubble laden Martian wall, too treacherous for her bigger, badder, laser-toting cousin, Curiosity, to even think about climbing.
The rover’s objective was to reach a target at the bottom of an outcrop that caps that part of Knudsen Ridge. “But it was on a steeper slope than either Spirit or Opportunity ever climbed,” said Ray Arvidson, MER deputy principal investigator, of Washington University St. Louis (WUSTL). There was also a light blanket of loose soil on her path up and some of the rocks broke up and crumbled under her wheels.
“That made it even more challenging,” said Ashley Stroupe, a MER rover planner, of the Jet Propulsion Laboratory (JPL), the birthplace of all NASA’s Mars rovers. “We just kept knocking pieces loose and couldn't get any real traction.”
“It’s not something we fault Opportunity for,” said Bill Nelson, chief of MER engineering at JPL. “We bumped up against some vehicle limits and got to the point where we were spinning our wheels. We were asking the rover to do more than she was capable of doing.”
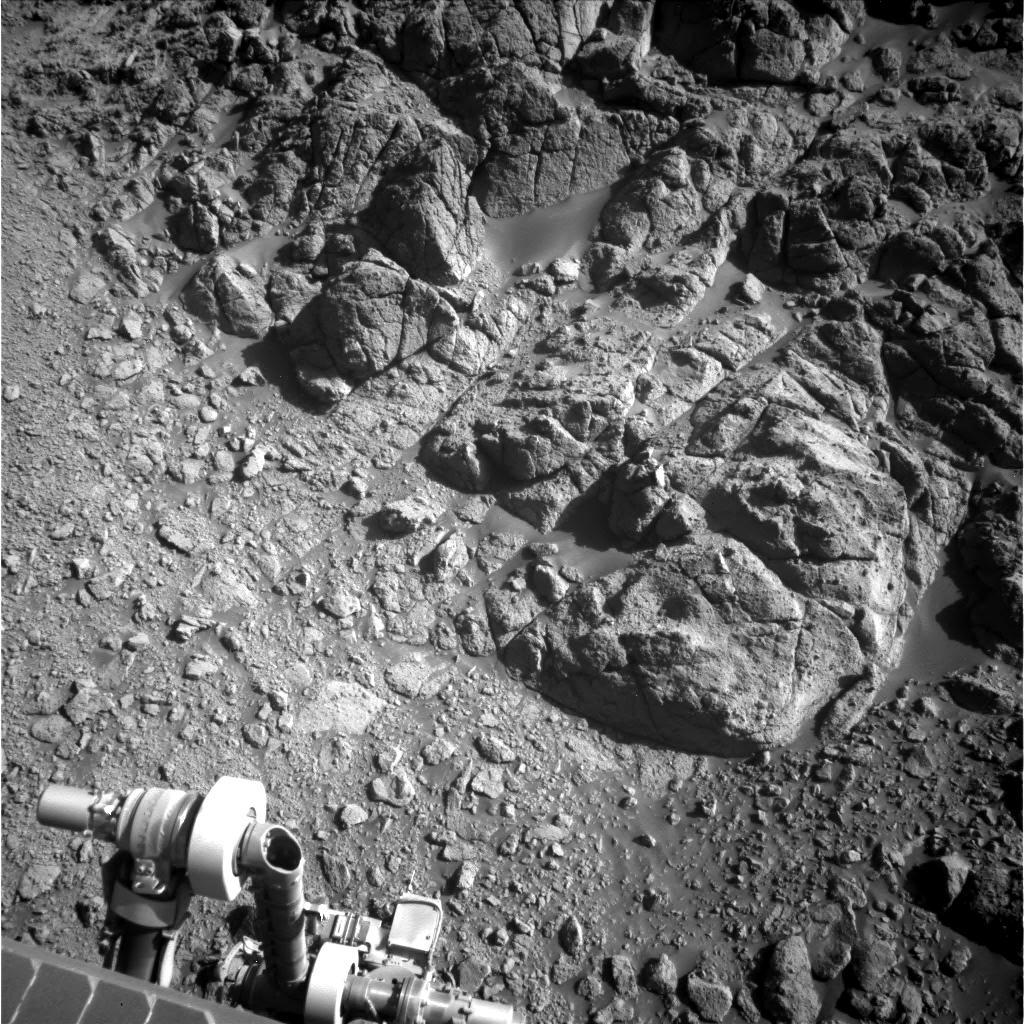
Pvt. Whitehouse
Opportunity took this raw image with her Navigation Camera on Sol 4311 (Mar. 10, 2016), the Martian day she made her last attempt to get to the first or four Pvt. Joseph Whitehouse targets atop a slope on Knudsen Ridge. Whitehouse-1 is the bright outcrop patch just above the bright cylinder on the Instrument Deployment Device (IDD), said MER Deputy Principal Investigator Ray Arvidson.NASA / JPL-Caltech
The MER ops team packed up its newfound knowledge and Opportunity backed down the slope. The veteran rover spent the second half of the month driving up the floor of Marathon Valley to a more accessible outcrop destination, along another slope on another part of Knudsen Ridge (unnamed as of post time), a site where Mars may finally give up its smectite secrets.
The Compact Reconnaissance Imaging Spectrometer for Mars (CRISM), a visible-infrared spectrometer aboard the Mars Reconnaissance Orbiter (MRO) searching for mineralogical indications of past and present water on Mars, first detected the signatures ancient phyllosilicates, specifically smectite clay minerals, in 2009. The orbital instrument indicated there is a mother lode of different types of smectites in Marathon Valley.
Opportunity the rover has been looking to uncover and characterize those remnant smectites since July 2015 when she first entered Marathon Valley from the western rim of Endeavour Crater. The working hypothesis is that the clay minerals are concentrated in areas the team has dubbed “red zones,” areas that feature deep red bands or “swirls in outcrops on the floor, linear veins, and perhaps layers in strata, as Arvidson described them.
Using additional CRISM data, Arvidson, also a co-investigator on CRISM, and his team at WUSTL, created a refined mineral map that the team has used to choose targets. When laid over an overhead image of Marathon Valley, the CRISM map shows “a one-to-one correlation between where the red zones are and the phyllosilicate signatures are,” as Steve Squyres, MER principal investigator, of Cornell, and Arvidson have both previously noted.
"The working hypothesis is that the floor of Marathon Valley is laced by a network of fractures that provide zones of weakness along which fluids can migrate," Squyres said. “Then the migration of those fluids produces local alteration, which changes the color, which changes the chemistry, which changes the mineralogy of the rocks.”
Opportunity pressed on through March, driving to the southwestern end of Knudsen Ridge where she climbed another slope. “The rover is actually exceeding our expectations,” reported Nelson. “Energy is excellent. The temperatures at Endeavour Crater are looking good. There are a lot of science opportunities ahead and we are actively exploring and looking forward.”
By month’s end, Opportunity was at the new site, surrounded by bedrock that may finally deliver the goods. “It's beautiful bedrock swept clean of sand with a very strong smectite signature,” said Arvidson. Twelve years and two months into her original 90-day mission, “it’s incredible,” he said.

NASA / JPL-Caltech / Cornell / ASU
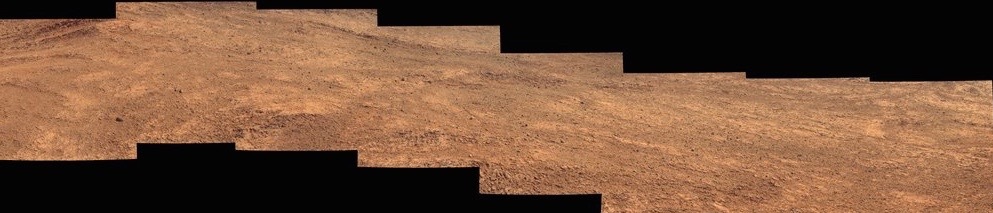
Knudsen Ridge
This Knudsen Ridge Panorama shows the slope that Opportunity has been scaling during the last couple of months. Reddish rock, such as within and between the knobs near the top of the scene, is what the rover team calls "red zone" material. Red zone locations in Marathon Valley correspond to locations of clay minerals mapped from orbit.When March 2016 dawned at Endeavour Crater, Opportunity and the MER team were focused on Pvt. Joseph Whitehouse, bedrock at the top of the Knudsen Ridge slope the rover was exploring. Named after a member of the Lewis & Clark Expedition, the bedrock is in one of the red zone areas that “may be a kind of broad alteration zone,” as Squyres described it, and the scientists were confident that this bedrock is harboring evidence of past flowing water and smectite clays.
The veteran rover drove into the month and began her approach, moving 1.9-meters (6.23 feet) on Sol 4303 (March 1, 2016) to reposition herself for a better angle on Pvt. Whitehouse. The rover’s tilt on the slope, in excess of 30 degrees, challenged her limits.
The post-drive imagery of the rover’s new position indicated that slippage from the steep slope required Opportunity make another 1.2 meter (4-foot) drive. And, on Sol 4304 (March 2, 2016), the rover did just that. While the robot did make some uphill progress toward the bedrock target, she again experienced significant slip.
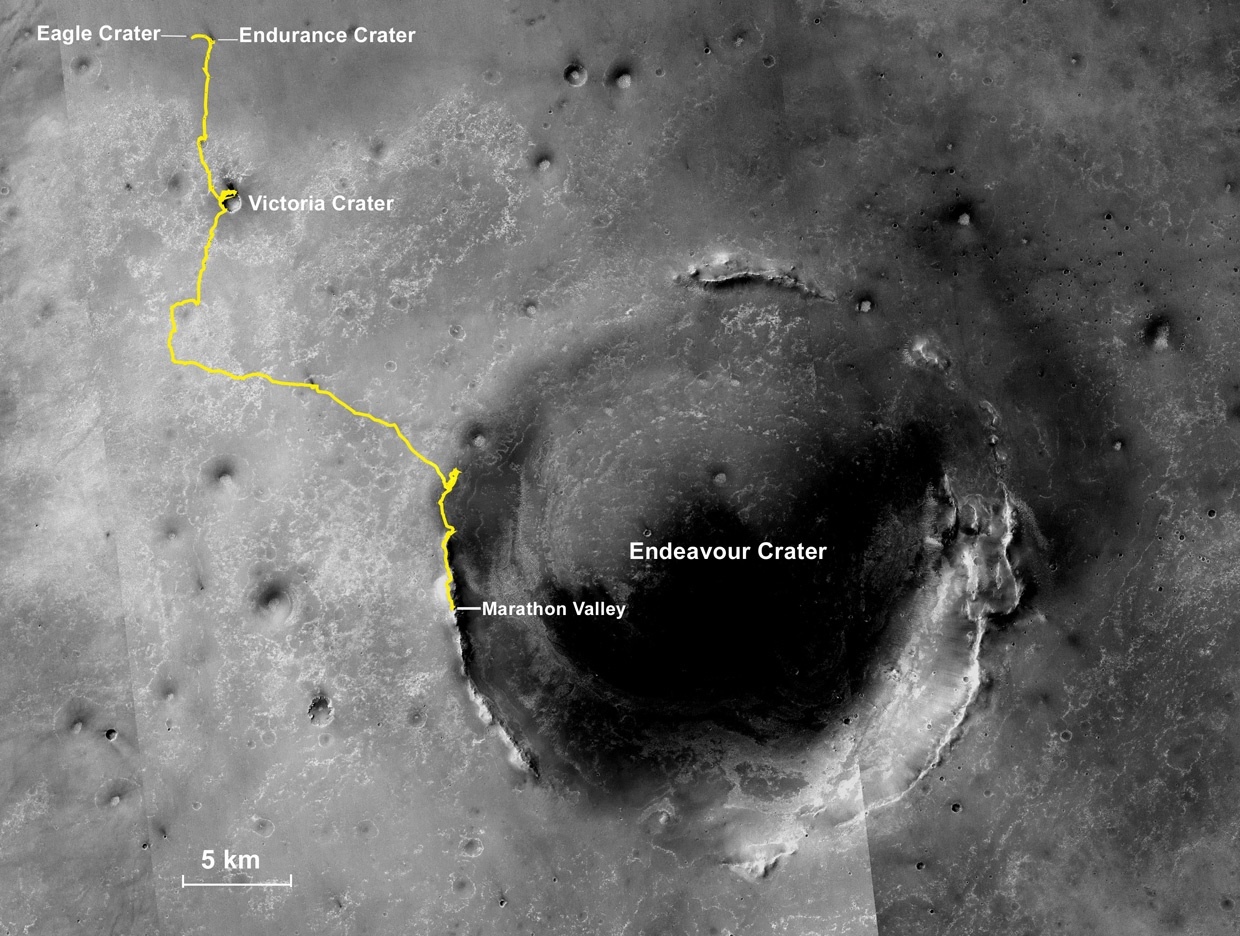
Oppy’s expedition so far
The gold line on this image shows Opportunity's route from the Eagle Crater landing site to her approximate current location. Since August 2011, the MER mission has been exploring the western rim of Endeavour Crater and in July the rover entered Marathon Valley. The base image for the map is a mosaic of images taken by the Context Camera onboard the Mars Reconnaissance Orbiter (MRO). Larry Crumpler, of the New Mexico Museum of Natural History and Science, provided the route add-on.NASA /JPL-Caltech / MSSS / NMMNHS
During the next several sols, Opportunity used her Panoramic Camera (Pancam) to take a mosaic of Pvt. Whitehouse and then took care of other business, including taking images of her deck for dust monitoring and re-taking some missed frames from the Whitehouse mosaic on Sol 4306 (March 4, 2016).
Opportunity attempted another hike upslope on Sol 4307 (March 6, 2016), but again slip caused her drive to end prematurely. While the MER team regrouped, the rover finished up the first week of the month taking some additional frames for the Knudsen Ridge panorama and taking Navigation Camera (Navcam) images of the immediate area, as well as images of her deck for dust monitoring.
The rover tried again to reach Pvt. Whitehouse as the second week of March began, but with her high tilt on the slope and the rubbly terrain under her wheels, she continued to slip more than advance. Once again her drive on Sol 4309 (March 8, 2016) was automatically terminated.
While the MER team assessed the situation the following morning, the rover took a Navcam cloud movie, snapped some Pancam multi-filter images of the foreground, and took more Pancam dust monitoring images on Sol 4310 (March 9, 2016).
Opportunity made a third and final attempt to get up close to Pvt. Whitehouse on Sol 4311 (March 10, 2016), but after 20 meters (65.61 feet) of commanded wheel motion, she had only advanced 9 centimeters (3.54 inches). This rover had scaled steep slopes before, but those slopes were, as memories serve, firm bedrock, not the loose soil covered and rubble laden terrain she was encountering on Knudsen Ridge.
When Opportunity hit a new tilt maximum of almost 32 degrees, the rover drivers “were unable to push vehicle up hill,” said Nelson. “It's the same sort of thing people on Earth experience when they ask too much of their dune buggies.”
The rover engineers knew they were testing Opportunity’s limits. “But it's a fuzzy area, because we don't know quite what vehicle can do because we don't quite know what the terrain is like,” said Nelson.
And, this is a rover and a team willing to take on a challenge. “Pvt. Whitehouse was important enough to take the time and do anything we could to get there,” said Stroupe. “And we did do everything we could,” she said.
“We gave it our best shot,” said Nelson.
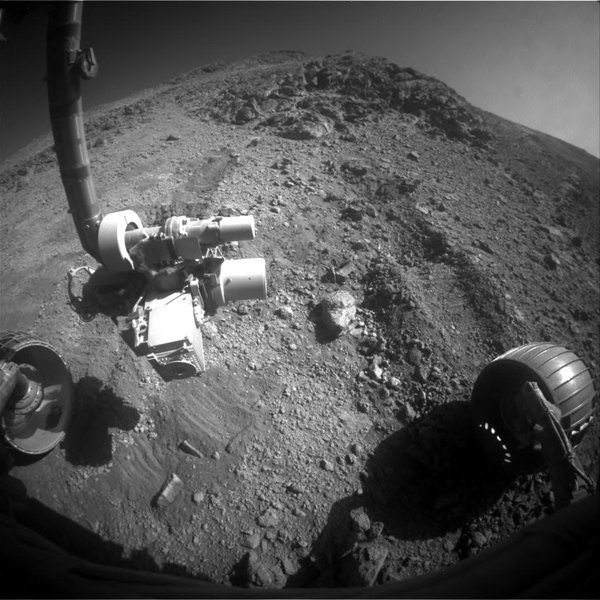
So close...
Try as she might, the terrain around Pvt. Joseph Whitehouse proved just a little too steep and rubbley for Opportunity. On her Sol 4313 (Mar. 12, 2016), the robot took this image with her front Hazcam as she was backing down the ridge slope.NASA / JPL-Caltech
But try as they might, Opportunity was unable to reach even the bottom of the bedrock. “We had identified four targets there, and Whitehouse-1, which was on the 'flats' right before the very steep part of the outcrop, was the easiest target to reach, but the 'flats' turned out to be a near 32-degree slope,” said Arvidson. “Whitehouse-2, 3 and 4 were father up hill and basically impossible to get to.”
Proven robot trooper that she is, a rover that has so often made everything look easy, supported by the most experienced rover team in the world, reality does bite sometimes, and this time Mars won. The MER team decided to rove on.
With their CRISM map, the scientists had already zeroed in on a new bedrock attraction to the southwest. About 50 meters from Whitehouse, the new site is located on a slope on the southwestern end of Knudsen Ridge or south wall of Marathon Valley. “We know we can get to this bedrock, because the slope isn't as steep on this part of the southern wall, which is tilted north,” Arvidson said. “And it’s got a strong smectite signature.”
So, on Sol 4313 (March 12, 2016), Opportunity backed down from the Pvt. Whitehouse bedrock with a 2-meter (6.56-foot) drive, taking documentary imagery as she went with both her front and rear Navigation Cameras (Navcam) and Pancam. Then, she used Alpha Particle X-ray Spectrometer (APXS) to take an overnight measurement of atmospheric argon for the mission-long study on Mars’ atmosphere.
The rover backed farther downhill (to the north) on Sol 4316 (March 15, 2016), putting about 6.7 meters (21.98 feet) behind her, or, actually in front of her. Following the mission protocol, she used her Navcam and Pancam to take post drive images on Sols 4318-4319 (March 17-March 18, 2016).
With that drive, Opportunity was back on the floor of Marathon Valley and ready to begin a series of drives that would take her to the next science site. Driving would be the name of the game for the rest of March.
Since Marathon Valley is slightly tilted to the east, Opportunity drove uphill, east to west, toward the Endeavour Crater rim. “We backed down the slope and turned, and then started heading southwest on the relatively flat, but tilted-to-the-east, part of the valley floor,” said Arvidson.
The robot field geologist logged 9.5 meters (31.16 feet) to the southwest on Sol 4320 (March 19, 2016). As usual, she took the routine Navcam and Pancam panoramas after the drive, and then spent a few sols taking care of routine engineering business, and taking images of her surroundings.
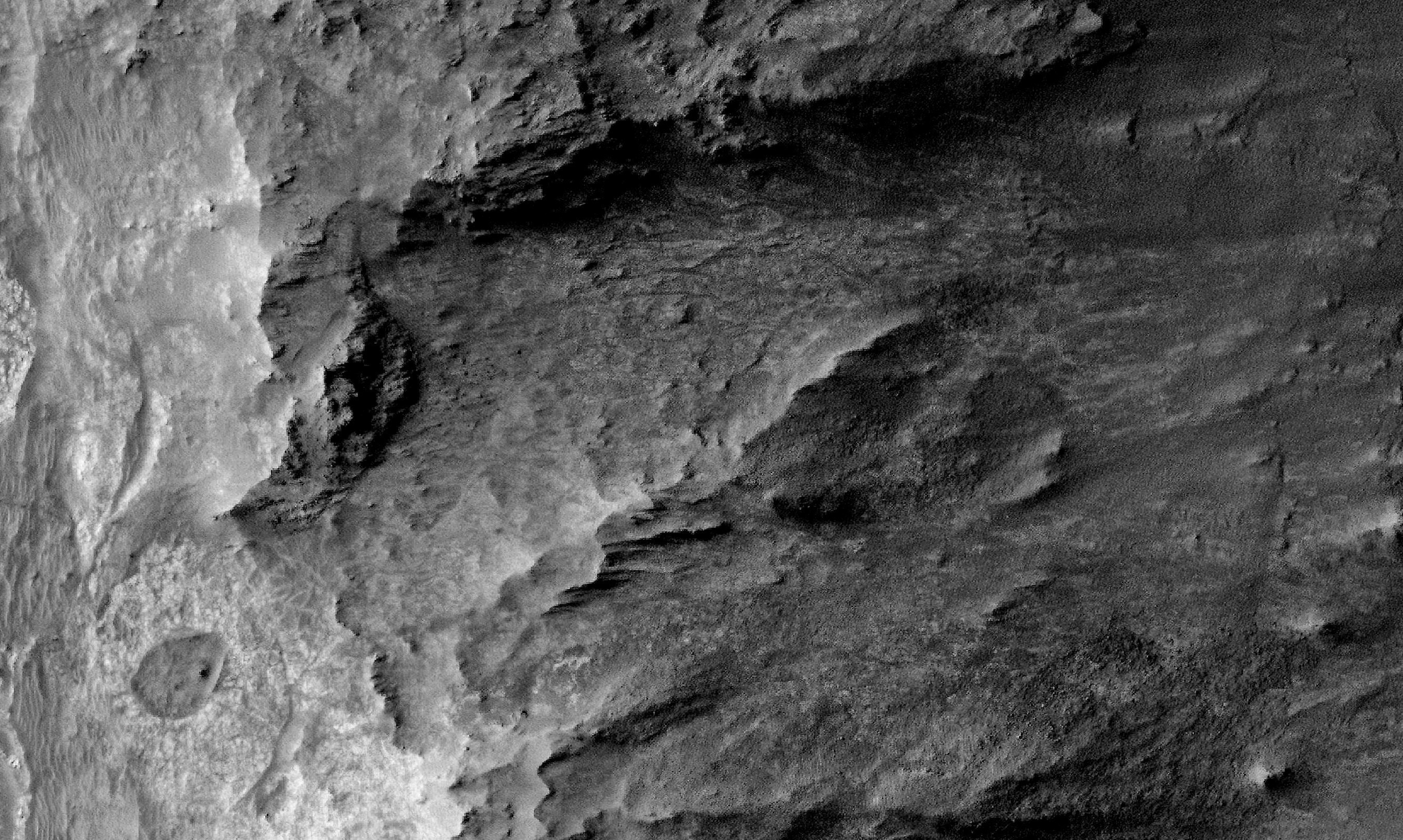
Overhead view of Marathon Valley
One year ago, Opportunity finished the first marathon on another planet as she roved into the apron area surrounding Spirit of St. Louis Crater (visible in lower left). It was 11 years and two months after she bounced to a landing and scored the first interplanetary hole-in-one. The valley stretches west to east about 330 meters (1100 feet) into the 22- kilometer (13.7-mile) diameter Endeavour Crater (to the right). The HiRISE camera onboard the Mars Reconnaissance Orbiter took this overhead image.NASA / JPL-Caltech / University of Arizona
The MER ops team then gave Opportunity her route and commanded the rover to drive 12.5 meters (41.01 feet) due west on Sol 4323 (March 22, 2016). She worked into the wee hours that sol on another APXS atmospheric argon measurement.
Two sols later, the rover revved her solar power engine and drove again putting 6.8 meters in her rear view mirror on Sol 4325 (March 24, 2016) before her drive suddenly stopped. Turned out that the rover’s VISIDOM (visual odometry) automatically halted the drive because it could not compute where exactly the rover had gone.
Basically that means that VISIDOM could not measure the rover’s progress accurately because of a lack of distinct visual features in the Navigation Cameras’ fields of view. “So the rover's system faulted and declared a VISIDOM ‘failure,’" said Nelson.
The rover’s VISIDOM is software that serves as a safety check for tracking the Opportunity’s sol-to-sol locations. A VISIDOM failure means that the rover has taken images and the team on the ground can’t find enough features in those pictures, like rocks or other geological signposts, to positively identify the rover’s specific location. But VISIDOM can also halt a drive even if there are visible landmark features.
“Depending on the lighting and shadows, it’s sometimes difficult for it to pick out edges of things that would allow us to really accurately identify features,” said Nelson. “That’s one of the other challenges we face even if there are features. And that appears to be what got us on this one.”
Opportunity spent the next couple of sols taking images of various potential targets and her surroundings, including some Pancam pictures of the valley floor. The robot has been taking a ton of images of the valley floor, as well as the valley’s northern and southern walls. So many Pancam images that anyone following this mission knows all those images are going to go somewhere – like into a huge, monster panorama.
Planetary Society President Jim Bell, the MER science lead on the MERs’ Pancams, of Arizona State University (ASU), confirmed that. “We will keep trying to cover as much of that landscape as possible,” he said. “I would expect that you will see a monster panorama once we've actually left Marathon Valley – we'll likely keep taking as many photos as we can right up to the end!”

Going up the country
During the second half of March 2016, Opportunity took off, roving to some place she’s never been before. On her Sol 4323 (Mar. 22, 2016), she took this shadow-selfie with her rear Hazard Camera.NASA / JPL-Caltech
Of course, there is still plenty of science the team seems intent on doing inside Marathon Valley, so there is no set date yet for Opportunity’s departure. Considering that and all the images the rover is taking, the Marathon Valley panorama to come seems destined to be one of the mission’s richest visual achievements.
During the final sols of March, Opportunity made a series short jaunts, heading south/southwest to close in on what the MER scientists have every reason to believe is an area on another part of Knudsen Ridge that is rich with smectite clay minerals. The rover logged 16.87 meters (55.35 feet) on Sol 4328 (March 27, 2016); 6.65 meters (21.81 feet) on Sol 4329 (March 28, 2016); and 12.87 meters on Sol 4330 (March 29, 2016). All of which brought her odometer to 42.735 kilometers or 26.55 miles.
When the Sun set on March, Opportunity was at her new site, on a friendlier slope along the southwestern part of Knudsen Ridge, and the scientists were deciding on their field geologist’s first inspections. Whatever they choose to check out, the rover is ready to rock as much as she’s ever been – something that by all accounts is simply amazing.
With power levels rising above 630 watt-hours, more than two-thirds her capability when she landed in 2004 and had clean solar arrays, and an improved dust factor of 0.764, meaning she’s utilizing more than 75% of the sunlight that hits her solar panels, it’s easy to assume that winds have cleared the rover’s solar arrays.
However, this time, said Nelson, it's hard to know that for sure. Other than catching images of a dust devil whirling by, which rarely happens, Opportunity has no way of knowing how much the wind might be blowing. The rover isn’t equipped with an instrument that measures wind.
Making things more complex is the fact that the dust factor isn't derived by just dust on the array. “It is a kind of a catchall,” said Nelson. “We have a Tau measurement and we have solar array energy, which is fixed. Based on the rover’s power production, we adjust the ‘knob,’ so to speak, to where we think the Tau is, and then we adjust the dust factor ‘knob’ to make the estimated power equal the measured power. So while dust is the primary aspect of the dust factor, it also incorporates other things.”
In any case, Opportunity’s power is now robust enough for the MER engineers to ponder – and reconsider their power prediction model. Consider that the current model takes into account the shadowing the rover experiences from the valley walls.
“Late in the day as the Sun sets on Marathon Valley, we see shadows come over the array and as a result we don't get the full sol's worth of direct sunlight,” said Nelson. “We think the terrain mask, or the estimate of where the edge of the rim of the valley is, may be a little conservative.” That is to say the rover isn’t shadowed quite as soon as the model indicates it will be. “So, maybe we get more energy that we predicted we should be getting because of that,” he suggested.
The MER power team, led by JPL’s Jennifer Herman, is looking into this. However, a thorough analysis requires imaging and recently the imaging needs of the scientists and the rover have been taking a priority. “Since we don’t have any visual update on the actual height of the valley wall, we're being cautious about saying that there's been any dust cleaning,” said Nelson. “It could be something else that is causing the rover’s boost in power this time.”
NASA / JPL-Caltech / Cornell / ASU / J. Canvin
Marathon flooring
On her Sol 4327 (Mar. 26, 2016), Opportunity stopped en route to her next bedrock attraction to shoot some images with her Panoramic Camera (Pancam) James Canvin, former radio astronomer, current meteorologist & data scientist, and amateur planetary science image processor, produced the image above from the raw images the robot field geologist sent home.As winter months on Mars go, there was certainly no cause for any real complaints. March 2016 did prove to be “a frustrating month” for the MER scientists, “because the rover just couldn’t quite get to Pvt. Whitehouse,” Arvidson assessed. Even so, this is a team united and the scientists are grateful for the engineering lessons learned from Opportunity’s attempt to reach Pvt. Whitehouse.
“Every time we do something we learn, and that helps us the next time,” said Stroupe. “Now we understand 30-degree slopes that are softer and can break up under our wheels, something that we hadn't experienced before. That gives us a new data point that will continue to help us in this region to pick targets we are more likely be able to successfully approach.”
The lessons learned are also important also in terms of wheels forward, for when the mission exits Marathon Valley. The plan of the moment is for Opportunity to rove south, heading farther downhill in Cape Tribulation to try to find the most ancient Martian ground, Matijevic Formation.
Opportunity first uncovered this ancient layer in 2012-2013 on Matijevic Hill in "one of the most important science campaigns on the whole mission," as Squyres defined it then. But since then, there has been no sign of it. “To the south in Cape Tribulation, it’s topographically lower than where we are now, and so we're going to be driving on slopes whether we want to or not. Getting this engineering information this month will be very valuable, concluded Arvidson, displaying the team members’ usual optimistic outlook.
Valuable and inspiring. Now that the MER mission’s seventh Martian winter is slowly transitioning to spring and the rover is, as always, ready to rove, some of the ops team members are thinking ahead...way ahead, of long-term, ‘ridiculous’ plans for the future.
The MER team has sent both Spirit and Opportunity off on a number of impossible journeys during the course of the mission...commanding Spirit to climb Husband Hill in order to survive her first Martian winter...dispatching Opportunity on the dream trek to Victoria Crater...and then the bigger dream of Endeavour. “Every time we last another year, we start thinking of where we’re going to go next,” said Stroupe. “And those long-term, ‘ridiculous’ plans start seeming less ridiculous.”
But that other big crater destination down the road a ways is another story for another report. For now, Opportunity and the MER ops team members are cruising with the flow into a future that is still – 12 years, two months, and counting down the Martian road – exceptionally bright.
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate