
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Opportunity Hits Winter Slopes at Marathon Valley
Sols 4155-4184

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
November 4, 2015
Mars Exploration Rover
NASA / JPL-Caltech / Maas Digital
Opportunity hit the slopes of her seventh winter haven on the south side of Marathon Valley in October as the Mars Exploration Rovers (MER) mission entered the 130th month of what was initially slated to be a 90-day tour.
The veteran robot field geologist has been investigating rock targets in Marathon Valley, which cuts through the western rim of Endeavour Crater for about 300 yards or meters, since late July, working her way west to east on a geological reconnaissance of the area.
In mid-October, the rover pulled into the southern part of the valley and onto a north-facing slope with little effort and plenty of time to check out her new site and find the best targets to actively investigate during the coming Martian winter. “We kind of just slipped into the winter haven,” said Matt Golombek, MER project scientist, of the Jet Propulsion Laboratory (JPL), home to all of NASA's Mars rovers. “We knew we had to get to these slopes and it just kind of happened naturally. The really good news is that it doesn’t look like we're going to be very constrained this winter.”
The solar-powered rover cannot move her solar arrays. But Opportunity can position herself on north-facing slopes to angle the arrays toward the Sun. By tilting herself toward the Sun, which is in the northern part of the sky during fall and winter days in the southern hemisphere of the Red Planet, the robot can increase the power output from her solar arrays.
"We're now on a north-facing slope on the south side of the valley and getting good energy production," said John Callas, MER project manager of JPL. "Our expectation is that Opportunity will be able to remain mobile through the winter."
The rover will spend the coming Martian winter – which lasts about twice as long as winter on Earth – on the northerly slopes, gathering sunshine, exploring, and looking for the remnants of clay minerals and more evidence of past flowing water that the mission team knows is there. With the winter solstice in the southern hemisphere of the Red Planet or shortest-daylight sol to occur on January 11, 2015, the robot wasted no time in getting to work.
The first major science assignment for Opportunity in her winter haven is to shoot the dozens of pictures that it will take to produce for the mission’s next big color panorama. "We want to get Panoramic Camera (Pancam) coverage of the Marathon Valley floor and the southern wall," said Ray Arvidson, MER Deputy Principal Investigator, of Washington University St. Louis (WUSTL). But Opportunity and the MER team have been confronting a number of challenges in completing that assignment.
For starters, the rover operated in RAM throughout October, storing all her science and engineering data in her volatile Random Access Memory drive. That means the robot can only collect as much data and science as she can uplink that same sol to either Mars Odyssey, the mission's primary communications relay, or the Mars Reconnaissance Orbiter (MRO), the two NASA spacecraft that in turn downlink the rover's work to Earth.
Heading for the slopes
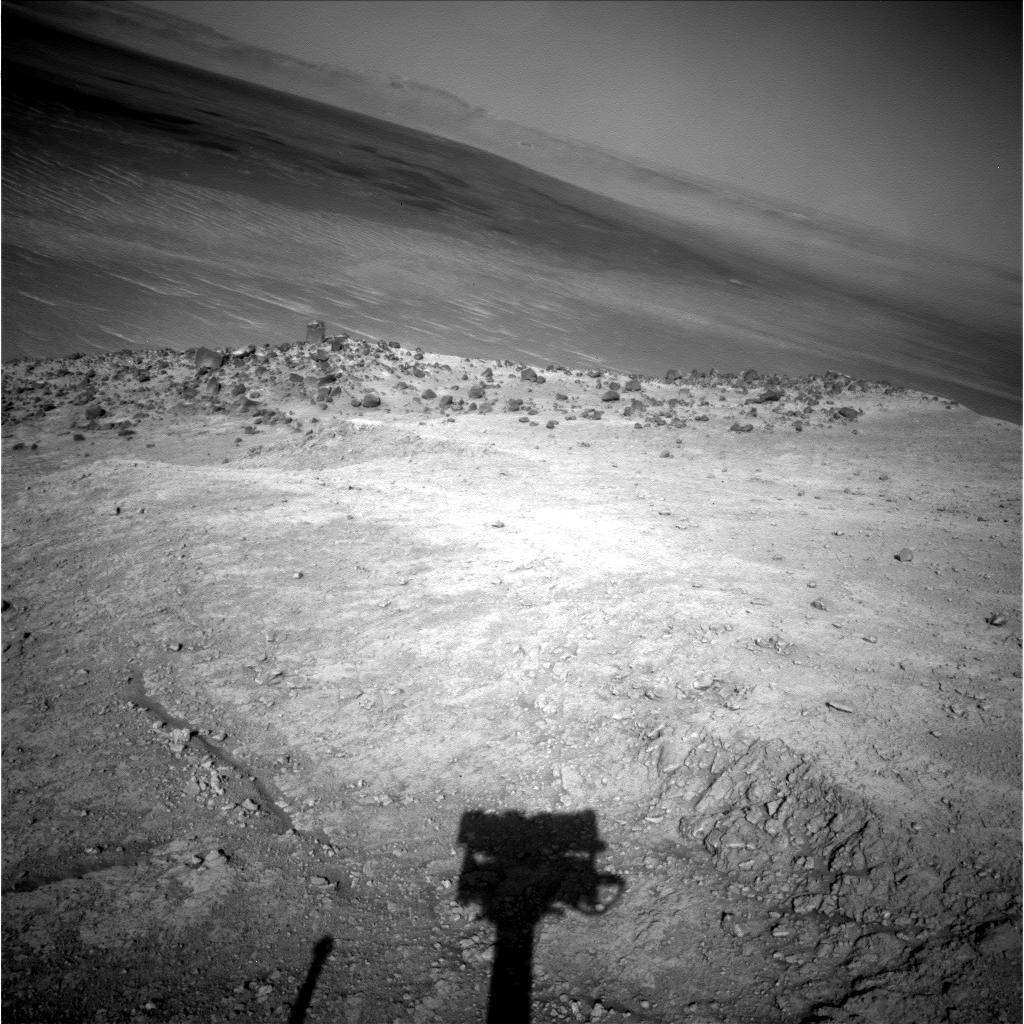
Opportunity took this raw image with her Navigation Camera (NavCam) on Sol 4167 (Oct. 14, 2015) as she drove to the north-facing slope in the southern part of Marathon Valley. The veteran Mars robot will spend the coming Martian winter in this area soaking up as much sunlight as possible and studying the best geological targets within her reach.NASA / JPL-Caltech
Because RAM is volatile memory, whatever doesn't get uplinked is lost when the rover shuts down to nap or go to sleep, so the rover has to stay awake until she can uplink her day’s work and staying awake requires power. Normally, the MER team would adjust the schedule, waking the rover later and trimming her work hours to ensure she’s plenty of energy when Odyssey passes by in the late afternoon.
As it turns out however, the best time to shoot the pictures for the new panorama is before Noon local Mars time. “We can't really image late in the afternoon, because the Sun is in our faces,” said Arvidson. "And we don't have enough energy to wake up in the morning, take the pictures, and stay awake until Odyssey comes by in the afternoon," added Golombek. "That is our biggest difficulty.”
To help resolve the problem, the MER ops team has been enlisting MRO more often than normal, because it passes over Opportunity’s site earlier in the day. But the low-elevation geometry of MRO’s orbit and the high valley wall to the west within Marathon Valley resulted in little or no data return on numerous occasions during October, leaving the panorama unfinished and the scientists wanting.
"A combination of winter coming, operating in RAM mode, inconsistent data return, and the location of the rover relative to the Sun is making it really difficult to complete this panorama," Arvidson said.
Life and work on Mars for Opportunity and the MER team would be much easier if the rover's flash or long-term memory was fully operational. But for more than a year the flash drive has been causing unplanned computer reboots and “amnesia” events, where the robot fails to mount the memory drive or copy data onto the drive before powering down.
Flash memory is a valuable asset because it enables the rover to store dozens of images and other science data for downlinking later when the bandwidth at the Deep Space Network (DSN) is available. The flash, in fact, has allowed for all those huge, breathtaking images of Martian landscapes that have become a hallmark of this first overland expedition of Mars, so the MER software engineers set about fixing the issues.
Despite three reformats of flash, the last of which was in March and involved installing new flight software that enabled the rover to erase and mask off the drive's bank 7 to which the MER software engineers had traced the problems, the issues continued. So while the rover worked her way into Marathon Valley, the team avoided using flash to conserve energy.
In September, the MER team commanded Opportunity to resume using her troubled flash for a total of 10 sols or Martian days to test the functionality of the memory drive and gain some experience with the new flight software,” said Bill Nelson, chief of MER engineering at JPL. While the rover successfully stored Pancam images and other science data, she suffered from a number of amnesia events and three unplanned reboots.
When October dawned, even though about 200 megabits of Pancam images and other science data were still to be uplinked from flash to one of the orbiters, Opportunity was commanded back into RAM and would operate in that mode throughout the month.
Amnesia events and sudden reboots notwithstanding, "the flash still probably offers some functionality," said Callas. So, as time permitted, the MER software engineers continued the process of reading out the code in the masked-off bank to search for any clues as to why the rover continues to suffer from amnesia and sudden reboot issues, a process they began a couple of months ago.
In coming sols, the plan calls for the rover to go back into flash in order for the team "to get the science data that is stored there and to further assess its potential usability going forward," Callas added.
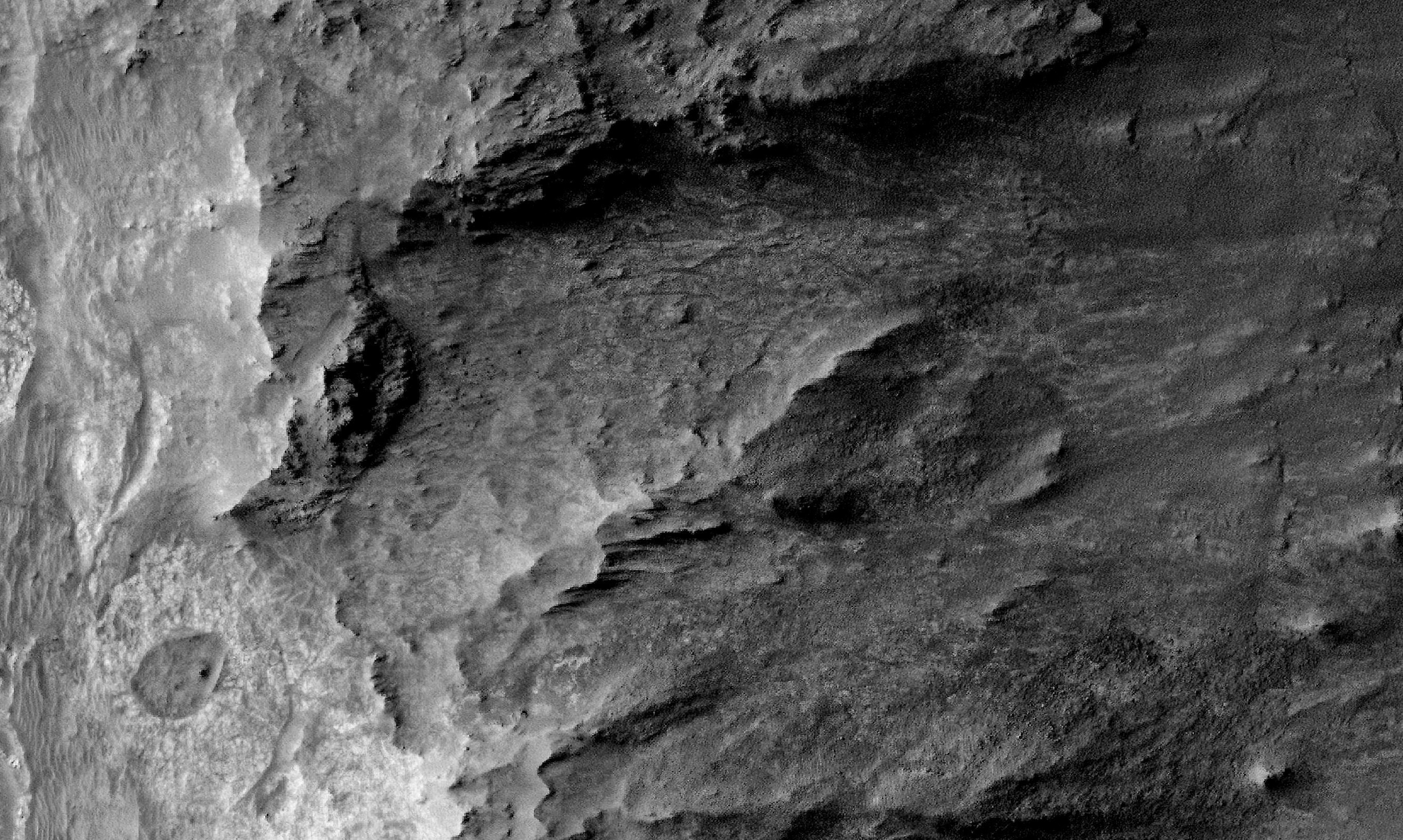
Overhead view of Marathon Valley
The HiRISE camera onboard MRO took this overhead image of Marathon Valley, which stretches about 330 meters (1100 feet) into the 22-kilometer (13.7-mile) diameter Endeavour Crater (to the right). Opportunity roved to the valley's southern end in October 2015 and is exploring near the floor and southern wall.NASA / JPL-Caltech / UA
Opportunity has been studying various sites along the western rim of Endeavour Crater since August 2011. The 22-kilometer (13.7-mile) diameter crater dates back to the Noachian Period some 3 to 4 billion years ago, and the MER mission is the only ground mission so far to investigate Martian territory this ancient.
In 2013, the MER team became the first to groundtruth phyllosilicates on Mars when Opportunity found remnants of clay minerals, typed as smectites, on Matijevic Hill at Cape York, which had been detected years earlier by the Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) onboard MRO. Smectites form under wetter, milder conditions than most rocks at the Opportunity site and are evidence of more neutral water, much like the kind we drink on Earth. The team also roved onto the oldest Martian terrain or bedrock ever discovered on Mars, known now as Matijevic Formation.
Marathon Valley became a high priority destination because CRISM detected a mother lode of phyllosilicates there compared to Matijevic Hill. During her geological walkabout of the area, Opportunity has been identifying targets in and near the valley floor for further up-close investigation once the Martian winter eases into spring.
The mission’s objective through the upcoming winter and beyond is to study the context for outcrops bearing clay minerals and neighboring deposits for clues about the history of environmental changes, just as the team did at Matijevic Hill. Although orbital data indicate the presence of several kinds of smectites there, so far the precise location of those clay minerals has been elusive and the Opportunity has yet to rove onto the ancient Matijevic Formation bedrock.
“We don't know what's carrying the clay minerals,” said Golombek. “We haven't figured that out yet. The rocks appear to be the same Shoemaker breccias that we've been seeing all along. They’re not like the layered sedimentary rock like the Matijevic Formation we found at Cape York. We haven't seen that yet.”
But Opportunity's work at Marathon Valley has only just begun. So far, the robot has examined deep red rocks in so-called “red zones” that contain more silica and less iron than most rocks in the area. These outcrops may be harboring some of the remnants of clay minerals the mission came to find and it’s possible the clay mineral signatures that CRISM picked up are coming from all over the floor of Marathon Valley, as Arvidson pointed out in previous MER Updates.
"We have detective work to do in Marathon Valley for many months ahead," said Arvidson. "During the Martian late fall and winter seasons, Opportunity will conduct its measurements and traverses on the southern side of the valley. When spring arrives the rover will return to the valley floor for detailed measurements of outcrops that may host the clay minerals."
Despite the trials and tribulations Opportunity faced in October, the robot succeeded in adding more clues for the scientist-detectives to ponder. Between shooting images for the new panorama, the rover looked at the variety of materials within her immediate reach, conducting in-depth examinations of a “reddish” outcrop, the soil around it, and a “blue” cobble, said Arvidson.
"Other than the issues with flash, Opportunity is actually doing quite well right now," said Nelson. "We are seeing the rover performing essentially exactly as we would like."
With power levels hovering around 325 watt-hours, about one-third the rover's capacity on landing back in 2004, Opportunity is faring better than she did during the last Martian winter. "And the projections through the rest of the winter look good," said Callas. "So we'll have a busy rover this winter."
NASA / JPL-Caltech / Cornell / ASU / J. Canvin
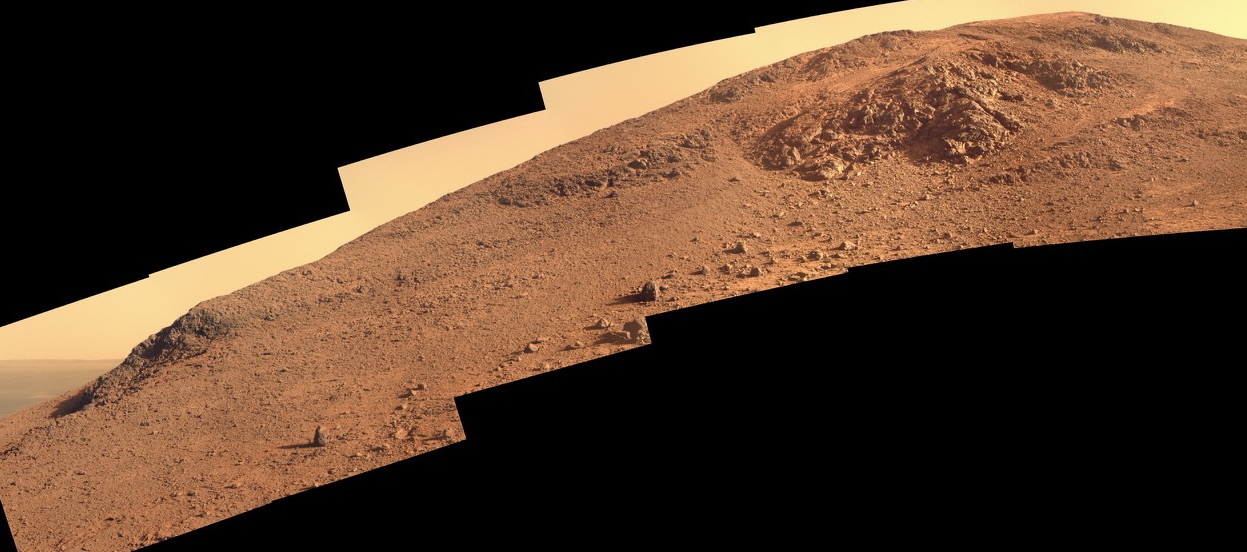
Marathon Valley southern wall
Opportunity used her Panoramic Camera (Pancam) on her Sols 4182 and 4183 (Oct. 29 and 30, 2015) to take the pictures that Planetary Society contributor James Canvin processed into this color image of part of Marathon Valley's southern wall. For more of Canvin's latest images of Marathon Valley, see his Twitter feed.Opportunity was supposed to drive out in September, but a sudden reboot changed that plan. It also ended the first real test of the rover's flash or long-term memory since it had last been reformatted in March. So, the rover woke up on Sol 4155 (October 1, 2015) in RAM mode and continued her trek toward the southern end of Marathon Valley, putting 8.5 meters (28 feet) in the rear view mirror. The next sol, she took some post-drive Navigation Camera (NavCam) and color Pancam panoramas.
On Sol 4157 (October 3, 2015), Opportunity drove again, performing a dogleg maneuver to avoid some obstacles. She spent the rest of that sol and the next sol taking color Pancam images and a Navcam panorama.
The rover drove again on Sol 4159 (October 5, 2015), heading east toward the crater for 14.5 meters (48 feet), taking the usual pre-drive and post-drive Pancam and Navcam panoramas. The following sol, the rover took the routine Tau to gauge atmospheric opacity with her Pancam, as she does nearly every sol, and then used the color stereo camera to image the southwest valley floor.
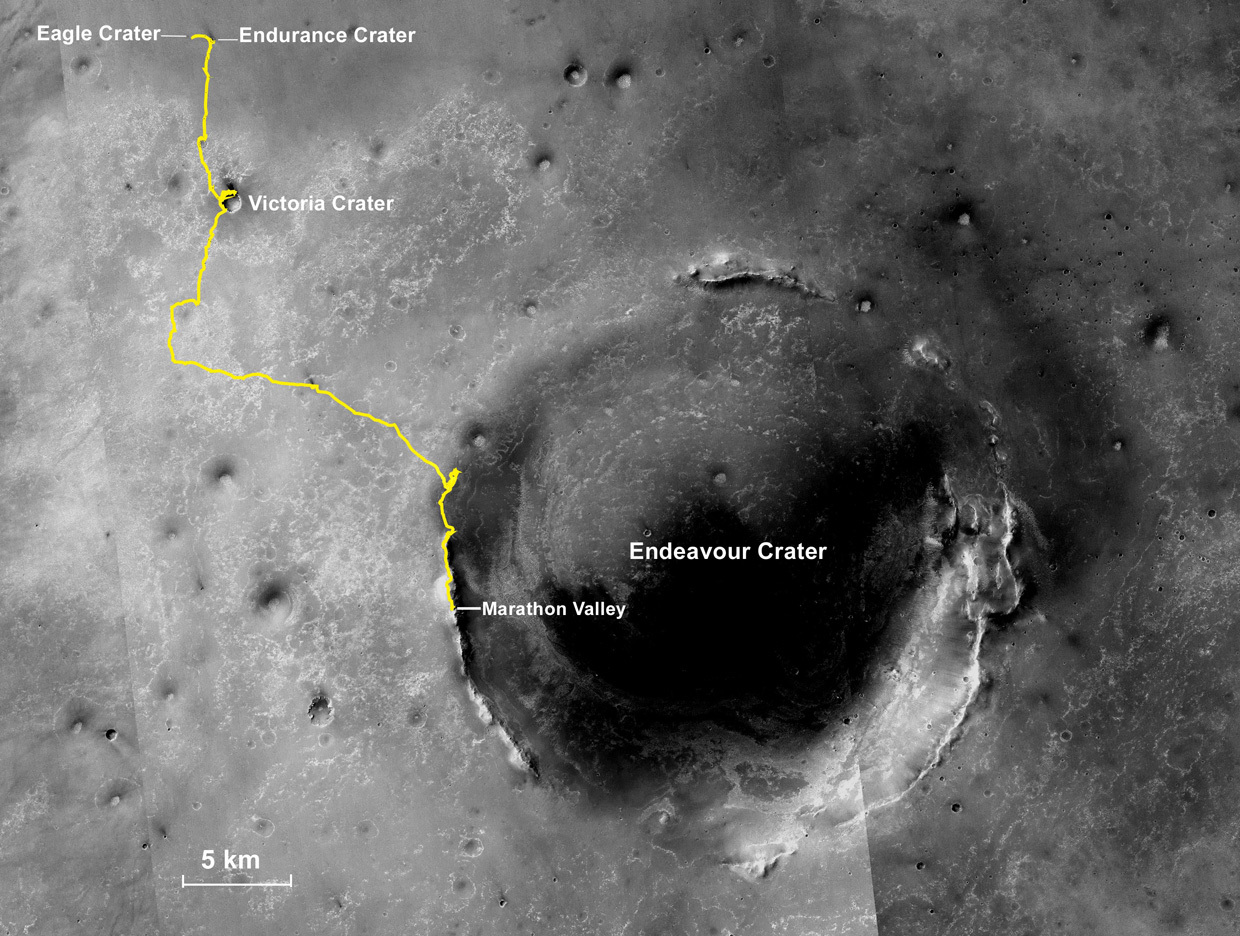
Oppy's long and winding road
The gold line on this image shows Opportunity's route from her Eagle Crater landing site to her approximate current location. Since August 2011, the MER mission has been exploring the western rim of Endeavour Crater. The rover entered Marathon Valley in July. The base image for the map is a mosaic of images taken by the Context Camera onboard the Mars Reconnaissance Orbiter. Larry Crumpler, of the New Mexico Museum of Natural History and Science, provided the route add-on.NASA /JPL-Caltech / MSSS / NMMNHS
Opportunity wrapped the first week of October on Sol 4161 (October 7, 2015) taking a Pancam Tau, NavCam and Pancam images of the path ahead, a Pancam image of the floor of Marathon Valley, and an Alpha Particle X-ray Spectrometer (APXS) measurement of argon in the atmosphere.
The robot field geologist began the second week of the month on Sol 4162 (October 8, 2015) checking on the dust situation. After taking the routine Tau, the robot used her Pancam to check out the dust on her deck. "We have the rover look at the deck so we can visually gauge the amount of dust that is there," said Nelson.
The rover then turned the Pancam to take more images of the southwest valley floor. With those images collected and while the camera was still warm, Opportunity measured the charge coming off imaging plate. "We did this to characterize the noise and to see if the CCD [charge-coupled device] is degrading, Nelson said. [A CCD is a photosensitive semiconductor sensor found in many digital cameras. The sensor, in essence, transports electric charge from one capacitor to another, allowing serial output of parallel data.
On Sol 4163 (October 10, 2015), Opportunity drove on, heading north then doglegging east to avoid some terrain obstacles, logging a total of 10.47 meters (34.35 feet). The rover stopped mid-drive to take some pictures of the location she just left to assist the engineers in analyzing the interaction of the wheel and terrain during her turn in place to change direction.
The rover took Panoramic Camera and Navigation Camera (Navcam) panoramas on Sol 4164, (October 11, 2015), and then MER software engineers had her continue the diagnostic readout of flash bank 7. So far, the read-outs still show everything to be normal. In other words, the data indicate the bank was effectively erased. The next sol, Opportunity took more Pancam images.
The robot field geologist drove on, heading southeast on Sol 4166 (October 13, 2015), and put another 20.08 meters (65.87 feet) in the rear view mirror. That drive put the rover on a favorable 12-degree northerly slope where she could take in as much sunlight as possible. After the drive, the robot took the usual Pancam and Navcam panoramas.

Opportunity's recent roves
This map of Opportunity's recent rovings and science stops was produced by Phil Stooke, an associate professor at the University of Western Ontario in Canada, author of The International Atlas of Mars Exploration Vol. 2, Spirit to Curiosity: 2004 to 2014, to be published by the Cambridge University Press later this year, and an active member of Unmanned Space Flight.com. The base image was taken by the HiRISE camera onboard MRO.NASA / JPL-Caltech / UA / P. Stooke
On Sol 4167 (October 14, 2015), Opportunity had to re-take the NavCam images of the path ahead, because her team on Earth didn't get much data the prior sol. “MRO's pass to the west was at a pretty low elevation, so the angle was such that the orbiter barely peeked above west valley wall," said Nelson. That sol however Opportunity began taking panels of pictures of the valley floor to the west and managed to complete five full panels of images.
Although the MER mission has been utilizing MRO more often than it typically has in the past, the geometry of its winter orbit put the spacecraft in the western part of the sky. With the west wall of Marathon Valley between the rover and the orbiter, the rover's uplinks to MRO and MRO's would-be downlinks "have not been terrific," said Golombek. As a result, the MER team has gotten little to no data return on some passes.
"It's frustrating, because we're trying to get the data, but we've come in more than once and heard: 'It just didn't make it. Or, 'The downlink wasn't big enough.' Or 'The Sun is right in our face,'" said Arvidson. "The issues of decreasing power as winter approaches, being in RAM mode, really skinny downlinks, and the late afternoon Sun are making this take a long time. We're trying to fight all those multi-variant problems to get the job done."
Since the combined factors of the rover's power and MRO's orbit made it apparent that the team would get little to nothing on Sol 4168 (October 15, 2015), the rover did no science. But on the following sol, 4169 (October 16, 2015), she succeeded in shooting 5 more panels of the western part of Marathon Valley's floor.
The team devoted Sol 4170 (October 17, 2015) to engineering only and the rover sent home 7.2 megabits flash bank 7 data.
Opportunity shot more Pancam images of the western portion of the floor of Marathon Valley on Sol 4171 (October 18, 2015), and also took a couple of Tau measurements to help the team characterize the dust situation. By viewing different sections of the atmosphere at different times, the team can better determine the amount of dust that is on the camera versus what is in the air.
NASA / JPL-Caltech / Cornell / ASU / J. Canvin
Roving through Marathon Valley
Opportunity used her Pancam on her Sol 4159 (Oct. 5, 2015) to take this image of the Marathon Valley as she was en route to the valley's southern section. James Canvin processed it into this false color image. False color is a technique the scientists use to better discern the various geological elements in the images the rover sends home.As the third week of October progressed, the robot took care of her daily, routine tasks on Sols 4172-4174 (October 19-21, 2015) and then took more Pancam images of the valley floor for the panorama. "We’ve gotta take tons of pictures to image all of valley floor,” reminded Nelson.
In the midst of taking the Pancam panorama images, Opportunity was given another assignment. "We took advantage of looking at the variety of materials in the workplane," said Arvidson.
The robot did an Instrument Deployment Device (IDD) salute on Sol 4173, lifting her arm out of way of the Pancam in order to take pictures of the targets the scientists wanted to check out in workplane.
After taking the usual Tau and capturing a single panel of the valley floor with her Pancam on Sol 4175 (October 22, 2015), Opportunity examined a "reddish outcrop" target named Private John Shields, after a member of the Corps of Discovery, more popularly known as the Lewis & Clark expedition. "It's somewhat like the other red zone red rocks, except it's dirty," said Arvidson. "But Private Shields has a mix of materials and is representative of the outcrop. Whether it's as red as the other stuff, I don't know."
The robot field geologist followed the mission's science protocol and took close-up pictures of Pvt. Shields with her Microscopic Imager (MI) and then analyzed its chemical composition with an APXS integration.
"All we have is APXS and imaging," said Golombek. "We don't have any mineralogy instruments that could immediately identify the clay minerals and it's going to take more sleuthing to try and figure it out. But right now, from what we've seen so far, it looks like the clays are probably alteration products and maybe that's not so bad, because certainly the last time, at Cape York, we were able to isolate the clay minerals by looking at those alteration zones. We just haven't gotten to that stage yet. We may need to wait until we come out of winter to be able to do that work and figure it out."
On Sol 4176 (October 23, 2015), the rover took the daily Tau measurement and then rested and recharged.
Opportunity turned her attention to a soil target dubbed Private John Thompson and got back to work on Sol 4177 (October 24, 2015). After taking the close-up pictures with her MI, the robot placed her APXS on the target and began an integration that lasted into the evening. That same sol, the robot did some more dust monitoring with her Pancam, and even worked in some more imaging of the valley floor with the stereo camera.
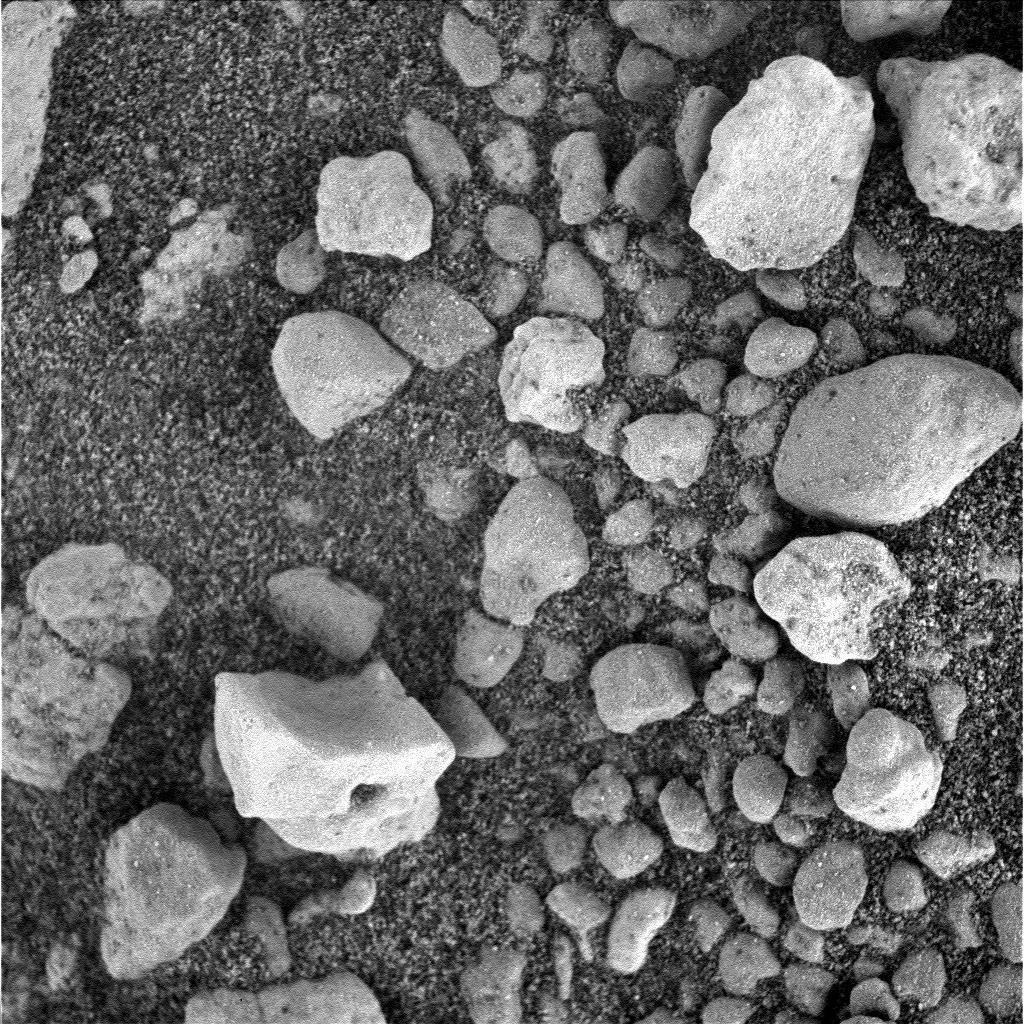
Soil, pebbles, and cobbles
Opportunity used the Microscopic Imager (MI) on her Sol 4177 (Oct. 24, 2015) to take this close-up images of soil, pebbles, and cobbles in the immediate area of the northfacing slope on which she perched in mid-October 2015.NASA / JPL-Caltech
The MER team devoted Sol 4178 (October 25, 2015) to engineering. The ops software engineers had Opportunity send home a little more data from flash bank 7, then the rover took Taus with her Pancam and another with her Navcam, to assist and simulate what the forthcoming InSight mission will do.
The following sol, Sol 4179 (October 26, 2015), Opportunity sent home more data from flash bank 7, "because not much data was expected to be uplinked and so not much was expected to be downlinked," said Nelson.
After conducting some more dust monitoring and shooting another panel of Marathon Valley's floor with the Pancam on Sol 4180 (October 27, 2015), the rover moved her IDD or robotic arm to the next target a blue cobble named Private Peter Weiser, which is adjacent to Pvt. Thompson, and performed a Mössbauer touch on the target. Although the iron-detecting instrument is no longer in commission as a mineral detector, the rover still uses it to help her more precisely place the other working instruments on her IDD.
Opportunity took some MI pictures, pulled her arm up a bit to get some more close-up pictures of the field of view, and then placed her APXS on the cobble. On Sol 4181 (October 28, 2015), the robot took a NavCam 360, basically a 10-frame panorama, and then conducted her APXS integration on the cobble. With that, the robot finished the first sampling of the geology the scientists had targeted.
The next sol, the robot field geologist bumped about 10 degrees to rotate just enough to get onto "a greater expanse of outcrop and a new outcrop target, and to achieve a pointing azimuth that will maximize the communication links for the rover," said Arvidson.
On Sol 4183 (October 30, 2015), the plan was for Opportunity to put the IDD down on the new outcrop target, get some MIs and APXS data, and then integrate over the Halloween weekend.
Although the Martian winter is still on the horizon, the rover is already “feeling winter,” Arvidson said. "We're effectively in the winter campaign, because if we drive out onto the floor of the valley, we'd lose the northerly tilt and the power we gain from it and we need that power."
Meanwhile, on Earth the MER software engineers continue to peruse the data from flash bank 7 that Opportunity sent home. At the end of October, they had 62.5% of the code in hand. "We plan to complete that as an ongoing task as time permits," said Callas.
During the first sols of November, while most of the MER scientists will be at the Geological Society of America meeting in Baltimore, Opportunity will be spending her time on engineering assignments. "We're going to take another step back into flash," said Callas. "We want to do some more assessments of the health of flash to establish its potential usability going forward."
In addition to the unplanned reboots, there is also some new concern about the amnesia events, because there were several times in September when the rover woke up and did not mount flash as commanded. Therefore, part of the next flash testing, slated for the first week in November, "is to do some diagnostics to see if we can understand that," added Callas.
The team also wants to empty out the 200 megabits of data that's still in flash and if, everything goes as hoped, fill it with more science data. In any case, the engineers have set up a contingency plan if the rover wakes up and for whatever reason does not turn on flash. "If that happens, then the rover will continue the bank 7 read-outs, store that data in RAM, and we'll get that down," Callas said.
All in all however, Opportunity's excursion into flash in September may not have been as bad as some observers presumed. "Out of nine sols, there were three re-sets total and two of them happened in the same day," said Callas. "If we can manage that and the amnesia events, flash will still offer some level of functionality."

photo_credit
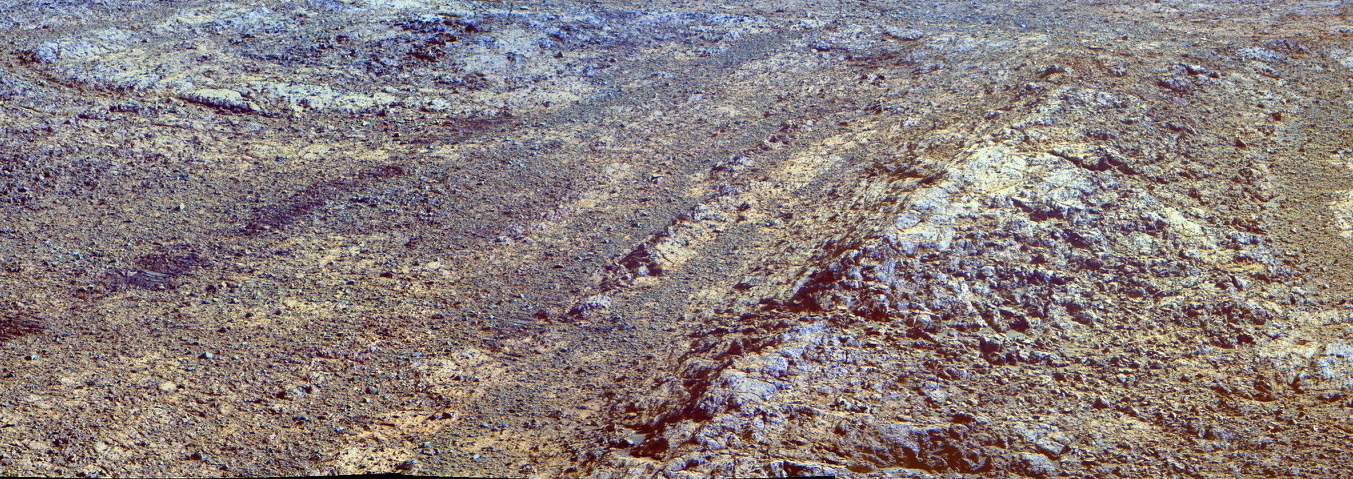
Marathon Valley west
This image shows the western part of Marathon Valley. It is comprised of multiple pictures that Opportunity took with her Pancam from Sol 4169 (Oct. 16, 2015) to Sol 4175 (Oct. 22, 2015). James Canvin processed it into this near true color image. For more of Canvin's latest images of Marathon Valley, see his Twitter feed.Roving forward, Opportunity will continue her work on the next big panorama, which no doubt will offer a wealth of geological information for the team to study and consider. "It's clear that from the little bit of imaging that we've done that the floor and the wall are structurally very complicated," said Arvidson. "It's a pretty beat-up place in terms of fractures and veins and structural modifications that probably occurred during emplacement of the crater and deposition of the ejecta."
For now, the veteran robot continues to show her MER mettle. "Opportunity is doing very well and we are preparing for winter," said Nelson. "It looks like we have good slopes and therefore will have decent power. So we don't have any major concerns about getting Opportunity through winter, and we expect the rover to be able to continue the science campaign."
"We're all really happy that it doesn't look like we're not going to be stuck in one place where we can't move like the last winter," added Golombek. "I think everybody is hopeful this will be a productive winter."
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate