
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Spirit Turns Wheels, Opportunity Rests at Rare Martian Rock

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
November 30, 2009
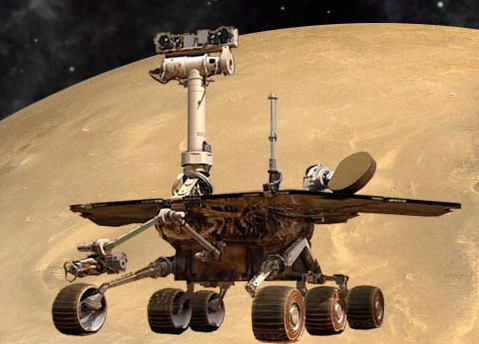 Mars Exploration Rovers
Mars Exploration RoversCredit: NASA / JPL-Caltech
The Mars Exploration Rovers managed to make history and uncover history in November – and that put both Spirit and Opportunity in the planetary exploration spotlight during the 71st month of an overland expedition that was supposed to be a three-month tour.
After six long months of being embedded along the edge of a shallow, sand-filled crater at Troy on the west side of Home Plate in Gusev Crater, Spirit began turning its wheels and making enough forward progress to boost MER team morale in a big way.
On the other side of the planet, Opportunity, on its long journey toward Endeavour Crater, needed to take a rest, but managed yet again to encounter the serendipity that seems to have aided these rovers from the beginning. The rover pulled up to a truly mysterious rock this month that the scientists never dreamed of finding this far into the mission.
“To see wheels turning on Spirit again and what that has done for the team, and then 2000 sols into the mission to find one of the most interesting rocks we've found with Opportunity, it's been a great month with good times on both sides of the planet,” summed up Steve Squyres, of Cornell University, the principal investigator for rover science.
“November has been a very exciting month,” agreed Sharon Laubach, the integrated sequencing team chief, who schedules the engineering tactical team, among other things, at the Jet Propulsion laboratory (JPL), where the rovers were designed and built. “It's been a long time coming to finally put the pedal to the metal on Spirit, such as it is, and just finally getting those wheels moving has the team elated.”
“Every time we actually drove, we made progress,” added Ray Arvidson, of Washington University St. Louis, deputy principal investigator for rover science. “The sinkage has been a little greater and the clearance between the rover’s belly and the ground diminished a bit. That is an issue. But the good news is that Belly Rock [the pointed rock touching the rover’s underbelly] looks like it’s not going to be a problem.”
After nearly six years of roving Mars, it’s remarkable even for these engineering marvels that Spirit’s wheels turned so freely. Not only has the rover endured the harsh thermal cycles of Mars, cycles that rise and fall as much as 100 degrees every single sol, but the rover drivers have not applied any kind of energy to Spirit’s wheels or the motors that turn those wheels for the six months it’s been parked at Troy.
 Spirit's third drive
Spirit's third driveThis blink comparison aids evaluation of a drive by Spirit during Its Sol 2092(Nov. 21, 2009). This was the third drive commanded by the rover team in an effort to have Spirit extricate itself from loose, sandy soils where it's been embedded since April 2009. The two wide-angle views shown one after the other in this comparison come from the right-side eye of the rover's front hazard-avoidance camera, one taken on Sol 2090 (Nov. 17) after the last drive prior to Sol 2092, and the other taken after the drive on Sol 2092. The most obvious change is in the position of the shadow of the rover arm, a change unrelated to the rover's movement during the drive. The shadow is farther to the left in the "before" (Sol 2090) image than on the "after" (Sol 2092) image. The view is looking northward. In the "after" image, the near face of a mound of sand in front of the rover's left-front wheel has eroded slightly northward, and some of the material that slid down that face can be seen slumped against the front of the wheel. Spirit experienced a wheel stall with the right rear wheel during the second step of the two-step drive on Sol 2092.
Credit: NASA / JPL-Caltech
“We've done three good extraction drives so far and we're seeing forward progress. We're also seeing more sinkage than we want to see. But it's so early in the process that I don't read anything particularly into that,” said Squyres. “We need to do this for a while and build up some long-term trends.” At the same time, Squyres warned of the uncertainty. “Our chances of getting the rover out are slim. This is quite possibly the end of the line for Spirit, but we're doing all that we can and the mood of the team is very, very good right now. Actually doing it is a helluva lot better than planning it.”
Laubach agreed. “There was all this energy and nervousness pent up for months as we worked with the ground rovers and tested extraction sequences again and again and went through all the reviews,” she said. “Our project manager, John Callas, has done just a fantastic job of leading the team through all the vagaries of this summer and getting us to this point,” she added, acknowledging management support in the esprit des corps way that has come to be a defining hallmark of this team, a rare kind of camaraderie and respect that seems to have gone a long way in thwarting the naysayers at every twist and turn and transforming the MER mission into a legend in its own time.
Meanwhile, at Meridiani Planum, Opportunity roved into November, logging another five drives and putting more than 260 additional meters (853 feet) on its odometer. But after five long drives, the motor for its right front wheel once gain began drawing higher currents than normal and the team decided it was time to rest.
Always the luckier of the twin robot field geologists, Opportunity found itself within reach of what is turning out to be an amazing find. “Marquette Island is one of the coolest things we've seen in more than 1000 sols,” said Squyres. “It's really one of the most interesting rocks we've seen with Opportunity and it's unlike anything we've ever seen with either rover.”
 Marquette Island
Marquette IslandOpportunity used its panoramic camera (Pancam) to take this picture of Marquette Island as it approached the intriguing rock on Sol 2063 (Nov. 12, 2009). The rock is looking to be quite a Martian gem, according to P.I. Steve Squyres. The image of Marquette here was rendered in false color by the Pancam team at Cornell.
Credit: NASA / JPL-Caltech / Cornell University
The investigation is still underway, but from the evidence so far, it looks like Marquette Island is not another meteorite as some science team members thought it might be, but, Squyres suggested, an ancient Martian rock heaved up from far below the surface during an impact event long, long ago.
If that theory holds, Marquette could be a key, maybe even a kind of Rosetta stone into really ancient Martian history.
As November turns to December and the rovers’ fourth Martian winter harkens from the horizon, the plan calls for Spirit to continue turning its wheels forward until it clears Belly Rock, then begin crabbing, or sidestepping, upward, as Opportunity continues its investigation of Marquette Island. “This rock is so interesting and so important we'll take whatever time it takes to figure this one out,” said Squyres.
Both Spirit and Opportunity are roving into December in good physical shape and sporting plenty of power to carry out their duties. Spirit, which suffered another bout of robot “amnesia” last month, successfully reformatted its flash memory file system this month and has since been working away without any memory issues, averaging from 325 to 370 watt-hours of power. Despite the recurring issue with its “hot” right front wheel, the rest at Marquette appears to be serving Opportunity well, Laubach said, and the rover, which boasted between 376-400 watt-hours of power in November, is ready to move onward to Endeavour as December settles in on Mars.
Spirit from Gusev Crater
As November dawned at Gusev Crater, Spirit was still sitting in its embedded location at Troy on the west side of Home Plate, suffering from an inability to access its onboard, non-volatile flash memory file system. Even as Halloween was haunting Earth, the engineering team had determined that reformatting the file system portion of flash would likely restore its use for data storage. So, as the month began, the MER team was working hard to restore their charge’s main memory bank.
 Simulation of Spirit's predicament
Simulation of Spirit's predicamentThis artistic image – in which Astro0 has placed a two-dimensional MER into a scene created by pictures taken by the real rover – illustrates Spirit's predicament at the location in Gusev Crater known as Troy. Although the angles are admittedly a little off and the disturbed soil isn't quite right, it offers the casual reader a glimpse into the present scene on Mars – and this rover scribe thinks it's a pretty cool illustration. See below for JPL's more acurate computer simulation of the rover's embedding.
Credit: NASA / JPL-Caltech / ©Astro0 2009
Spirit’s flash file system has been re-formatted before, first back in February 2004, as part of the recovery from the anomaly the robot field geologist experienced just a couple of weeks after bouncing down back in January 2004. It was also reformatted in April of this year, when the rover suffered a sudden series of unexpected bouts of robot “amnesia." During those events, the rover forgot to record its tasks to memory, then went to sleep and woke up with no recorded “memory” of the previous day's work. Reformatting is a process though and it would take well into the second week of November for Spirit and its team to get this third reformatting job done.
“There were a couple of things going on,” said Laubach. “The team is already stretched to the max supporting Spirit's extraction, so we needed to find the personnel and the time to make sure we were really doing the right thing with the flash reformat. We wanted also to review all the possibilities. With everything going on with Spirit, everyone is being super cautious, so we had a special review of the plan.”
Spirit, it seems, was raring to go a long time ago. Since the MERs don’t particularly like sitting around, the operations team developed a strategy to allow the rover to continue with important science and engineering activities and to get data home to Earth intact and uncorrupted. Since the data stored in the rovers’ volatile, random-access memory (RAM) is not saved when the rover powers down for sleep, they kept Spirit awake until the daily Mars Odyssey pass each late afternoon local Mars time. “We had Spirit do all the critical science and critical motion tasks in that same awake block with the Odyssey pass, the same technique we developed last April when the first amnesia events started happening,” confirmed Laubach.
While the JPL engineers were pretty certain that reformatting flash would do the trick, even before they sent up the files, the team invested quality thought time into pondering every little thing, including the worst-case scenario. What if the flash memory had failed completely or, in other words, if flash was permanently unusable? “We determined that we would be able to start extraction even if the flash reformat didn't help,” Laubach said, “by performing the moves before the Odyssey pass.”
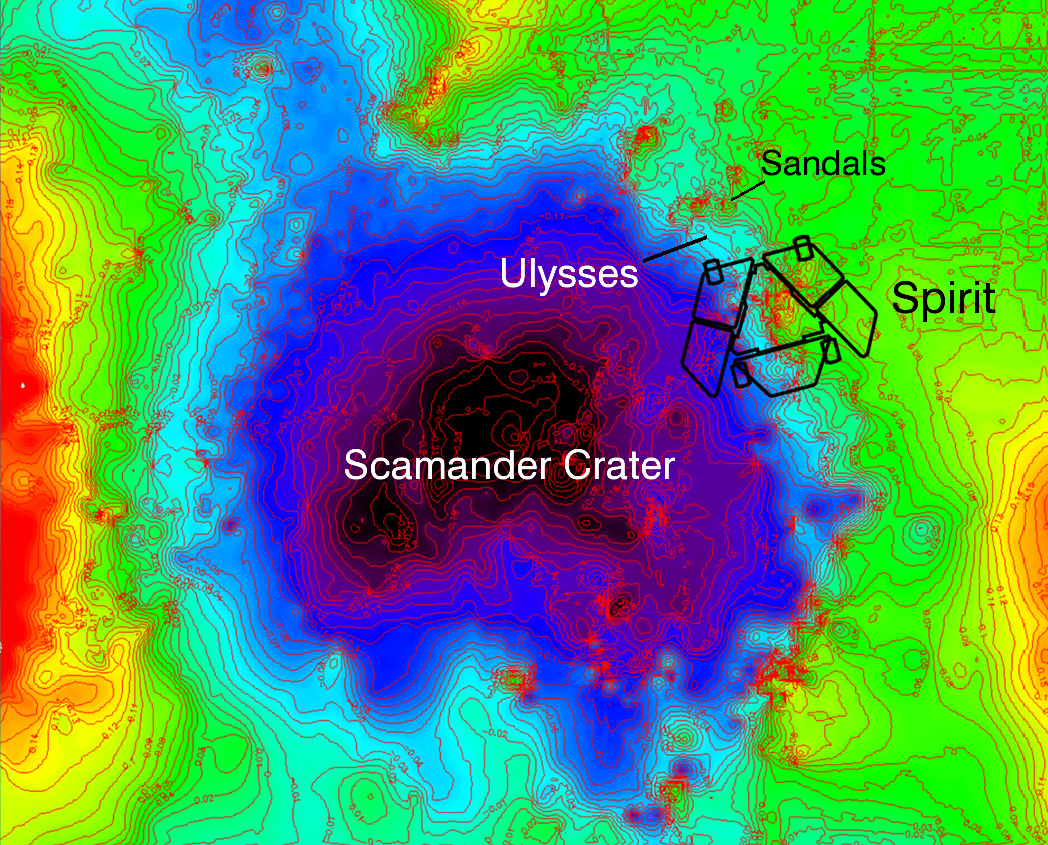 Topographic map of Spirit's location
Topographic map of Spirit's locationThis topographic map of Spirit's location at Troy represents low elevations in black, purple, and blue and high elevations in red. It was developed based upon te rover's camera images of the location, taken before it got snared by the sandy soils. The topographic model has had a regional slope removed, which reveals that Spirit's left wheels are sitting inside a subtle depression that the team has named Scamander Crater. The right-side wheels are outside the depression.
Credit: NASA / JPL-Caltech / Ohio State Univ.
In fact, Spirit essentially did just that. On Sol 2078 (November 6, 2009), the rover – for the first time in six months – turned its wheels and positioned itself for a straight-ahead drive.
Then the first drive in the long-awaited, much-anticipated extrication process was slated for Sol 2088 (November 17, 2009), once the rover and its team had a chance to reformat the flash memory.
When Spirit’s team passed their flash review, the MER engineers were ready to begin the process of reformatting and restoring the rover’s flash memory. “Of course, we had to load up all of the files that normally sit in flash memory, because they all got wiped out,” noted Laubach. Suffice to say, that’s a whole lot of kilobits.
Spirit has three different radio communications systems to receive and send data. A brief refresher:
- The high gain antenna – a directional antenna on the rover that is about .3 meter (1 foot) in diameter that tracks the home planet and enables the rover to communicate directly to scientists and engineers when it can “see” the Earth, transmitting 12 kilobits per second over this link, with a 14-to-20-minute delay because of the distance between Earth and Mars.
- UHF – a high-speed radio that allows the rover to communicate with spacecraft in orbit around Mars, Mars Odyssey and the Mars Reconnaissance Orbiter, and even ESA’s Mars Express in cases of emergency. When the assigned orbiter appears overhead and signals the rover, Spirit uplinks data at high speed for about eight minutes on each pass or receives commands in what is known as forward link communication.
- A low-power, slower UHF radio offers a link using a low-gain, omni-directional antenna that does not require any aiming. Data is transmitted back to Earth or to Mars Odyssey or another orbiter at a low data rate.
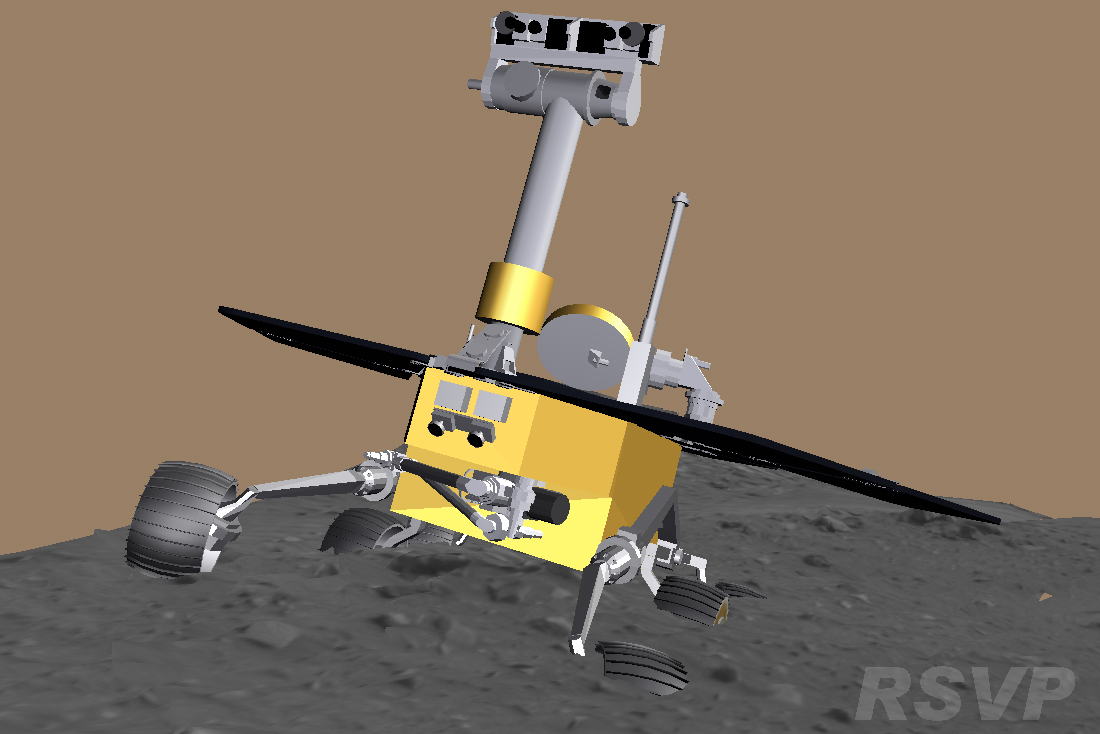 Computer simulation of Spirit's embedding
Computer simulation of Spirit's embeddingA screen shot from software used by the Mars Exploration Rover team for assessing movements by Spirit and Opportunity illustrates the degree to which Spirit's wheels have become embedded in the Martian sands of Ulysses at the location called Troy. The image simulates the rover's position on May 8, 2009, during its Sol 1900.It had not moved since then until this month.
Credit: NASA / JPL-Caltech
Because the low-gain antenna is the least efficient way for the rover and the MER team to exchange large volumes of data, the engineers wound up using a combination of forward link communication over the UHF radio and the HGA to get all the flash file data up to Spirit.
Spirit and its team spent much of the following week preparing and psyching up to begin the extrication process, collecting yet more microscopic imager (MI) pictures of its underbelly on Sol 2081 (November 9, 2009). Then, just two sols later, the rover reformatted and regained its non-volatile flash memory. And, the stage was set for the extraction process to begin.
On Sol 2088 (November 17, 2009), Spirit woke up and prepared for its first extrication drive. E-day had finally arrived. As planned, the rover followed commands to turn its wheels initiating the first step in a two-step plan, to drive 2.5 meters (8.2 feet). But it stopped as soon as it started. A “hair-trigger limit” on its tilted position stopped the action, essentially saying the rover’s 12-degree glide slope was too steep. “The first drive didn't work. It terminated early, because we had some tolerances set pretty tight,” said Squyres. “We're in a learning process with this.”
 Spirit's second drive brings good moves
Spirit's second drive brings good movesThis blink comparison documents very slight forward movement of Spirit during a drive on its Sol 2090(Nov. 19, 2009). The two wide-angle views are from the right-side eye of the rover's front hazard-avoidance camera, one taken on Sol 2088 (Nov. 17) and the other after the drive on Sol 2090. The most obvious change is in the position of the shadow of the rover arm, a change unrelated to the rover's movement during the drive. The shadow is farther to the left on the "before" (Sol 2088) image than on the "after" (Sol 2090) image. In the "after" image, Spirit's left-front wheel has become slightly less buried in the soft soil in which the rover had become embedded about six months ago. The right-front wheel, which has not been usable for driving since 2006, has been pushed perceptibly forward by the drive. The amount of forward motion is less than one percent of the distance that would have been covered on firm ground by the amount of wheel rotation commanded in the drive.
Credit: NASA / JPL-Caltech
“We're being extremely conservative,” added Laubach. “We're most concerned about sinkage. We had put a really tight limit on the sinkage and the only way that we really have to measure that is by measuring the distance from what we call a 3-D breadcrumb. Basically, it's just a datapoint,” she explained. “We call it 'dropping the breadcrumb' at the initial position, and then we move and compare our new position to the breadcrumb and look at the distance … It [the breadcrumb] is the rover's knowledge of where it is.”
Thus, the breadcrumb, because it is a 3-D datapoint, also limits how far Spirit can go in any direction. “In addition, we also have lots of other safety checks: suspension limits, and pitch and roll limits from encoders on the rocker bogie,” Laubach said. “We had all those set very, very conservatively so that if anything untoward looked like it was even beginning to happen we would pull the plug on the drive. We had all those set really tightly and sure enough as soon as she started to move a wheel, Spirit tripped the limit.”
The team decided to ease up just a bit on the tilt limit for the second drive attempt, by a mere 0.1 degree, so small is was almost “imperceptible,” said Arvidson. And two sols later, Sol 2090 (November 19, 2009), Spirit initiated the same two-step motion.
“We opened up the limit just a little bit and that was enough,” Laubach reported.
Spirit so successfully completed the first step that it didn’t even have to do the second step. After spinning its wheels for the equivalent of 2.5 meters (8.2 feet) in the forward direction, the center of the rover moved approximately 12 millimeters (0.5 inch) forward, 7 millimeters (0.3 inch) to the left and about 4 millimeters (0.2 inch) down. They saw small forward motion with the non-operable right front wheel, and the left front wheel showed indications of climbing despite the center of the rover moving downward. While these minuscule motions were too small to establish any trends, Spirit had made forward progress and seemed to display that incredible MER resilience and determination.
This month, Spirit at long last began the process of trying to extricate itself from its embedded position along hthe sandy edge of a once-hidden crater at Troy, dubbed Scamander Crater by the team. To follow the sol-by-sol prcoess, visit the Free Spirit webapge at: http://www.jpl.nasa.gov/freespirit/
Credit: NASA / JPL-Caltech / John Howard
Since the drive plan had imposed a limit of 1-centimeter (0.4 inch) motion in any direction and Spirit had exceeded that limit on just the first step, it had no need to perform the second step of the drive. “She stopped after a centimeter even though we commanded two steps of 2.5 meters each, because she did the full 1 centimeter in the first step,” Laubach confirmed. “We’re limiting Spirit to just a centimeter now, because if that whole centimeter is sinkage that would be bad and we would need to know it right away,” she explained.
Spirit sent measurements and photographs home for team members to analyze, something that will become routine as the extrication continues. Happily, the data downlink volume from the rover was much better than expected, with all drive-related imagery being received. It was without doubt and by all accounts a good sol’s drive at Gusev. Cheers from the rover mission control could be heard throughout the building where it is ensconced at JPL. It was just what this team needed, said Laubach.
Neither rover nor team members took any time to rest. Another drive was planned on Sol 2092 (November 21, 2009).
Just like the previous drives, Spirit was instructed to drive straight ahead in two 2.5-meter (8.2-foot) steps. The first step went well, but during the second step a stall occurred in the right-rear wheel.
 Belly Rock motion in first Free Spirit efforts
Belly Rock motion in first Free Spirit effortsFrom its Sol 2088 to Sol 2090, the pointed rock touching Spirit's underbelly, dubbed Belly Rock, receded ever so slightly into the distance.
Credit: NASA / JPL-Caltech / USGS / animation by Emily Lakdawalla
This is not the same wheel that stalled on Sol 1899 (May 6, 2009). That was the left-middle wheel. Nor did the right-rear wheel on Sol 2092, experience a hard stall like what was seen on Sol 1899. Instead, telemetry suggested that the wheel was bogging down, and that it stalled because the wheel's progress fell behind the expected rotation rate.
Actually, the MER engineers had commanded the right rear wheel to rotate at a slightly slower speed to allow the right middle wheel to gain more traction. “We had slowed down the right rear wheel, because we thought that we were seeing a wheelie develop on the right side,” Laubach explained. “We're trying to correct the wheelie and so there was a stall on the right rear wheel.”
But neither wheelie nor stall was to keep Spirit from moving. Before the rover automatically terminated the second step, it managed to move forward a little bit more. Specifically, the center of the rover moved about 4 millimeters (0.2 inch) forward, 3 millimeters (0.1 inch) to the left, and about 3 millimeters (0.1 inch) down. Its suspension stayed within the tighter limits set for the drive, and there was only a fractional change in rover tilt.
At the conclusion of the commanded motion, Spirit took three pictures with its microscopic imager (MI) for a mosaic of the view from underneath its belly. It used its panoramic camera (Pancam) to snap pictures of the middle wheels, and the navigation camera to take pre-drive and post-drive images for visual odometry. As usual, the rover also used it front and rear hazard-avoidance cameras to snap supporting images and the MER engineers huddled amidst all the fresh data.
On Sol 2095 (November 24, 2009), they commanded Spirit to conduct a diagnostic test on its right rear wheel that included a rotor resistance test and a small backward rotation of just the right-rear wheel and a short (about 1 meter, or 3 feet) forward commanded motion of the rover. They also set tighter limits on the rover's change in direction (yaw) and the angles of the suspension system.
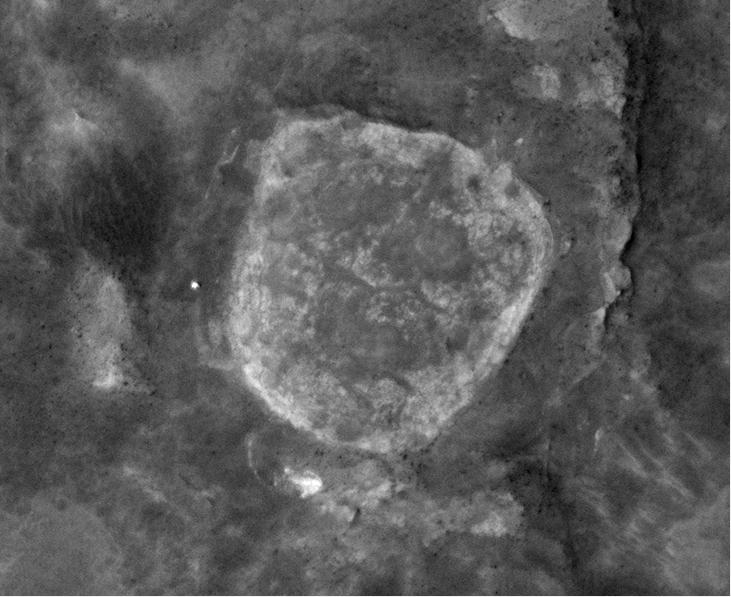 Spirit at Troy
Spirit at TroyThe little white dot on the left side of this image is Spirit. It is on the western side of Home Plate in an area the team calls Troy. This image was taken by the University of Arizona's HiRISE camera onboard the Mars Reconnaissance Orbiter.
Credit: NASA / JPL-Caltech / UA
The test results indicated a fully functioning right-rear wheel free of obstruction. “We did a little diagnostic where we rotated it backwards and forwards and whatever that wheel got hung on, it freed it up, and then it was back to normal,” said Squyres.
During the part of the test where the rover was commanded to conduct a short (1.5 meter) forward drive, Spirit roved up to the plate again. During that drive, it actually moved forward another 2 millimeters (0.08 inch).
“That command on Sol 2095 was a combination diagnostic and short drive and Spirit completed the drive with no errors, giving us the expected motion,” Laubach summed up. “We saw significantly less sinkage than on the prior couple of drives,” she added. “But the numbers are very, very small and so it's very difficult to tell. There's a lot of noise in our sinkage measurement, meaning that we're measuring things on the order of millimeters and the uncertainty in our measurement in on the order of millimeters.” That means that it could be Spirit didn't sink at all. Or it could have sunk more than they thought. But given the combined experience of the JPL engineers who have worked with these rovers for nearly six years, to believe they saw less sinkage is a hopeful sign.
The cumulative results from Sols 2088 to 2095 (November 17 to 24) are 8.1 meters (27 feet) of commanded motion, 15.7 millimeters (0.6 inch) of forward progress, 9.9 millimeters (0.4 inch) of movement to the left, and 4.8 millimeters (0.2 inch) of sinkage.
Another two-step drive, 5-meter (16-foot) drive – with each step being 2.5 meters (8.2 feet) of commanded wheel spin – was set for Sol 2099 (November 28, 2009), during the Thanksgiving holiday weekend. Though Spirit initiated the command without issue, the drive terminated with another stall of the right rear wheel. The rover did manage to move about 1/2 millimeter before the stall prevented further motion. The team is planning to do diagnostics of this latest stall on Wednesday, December 2, 2009, and from the results of those tests will decide what to do next.
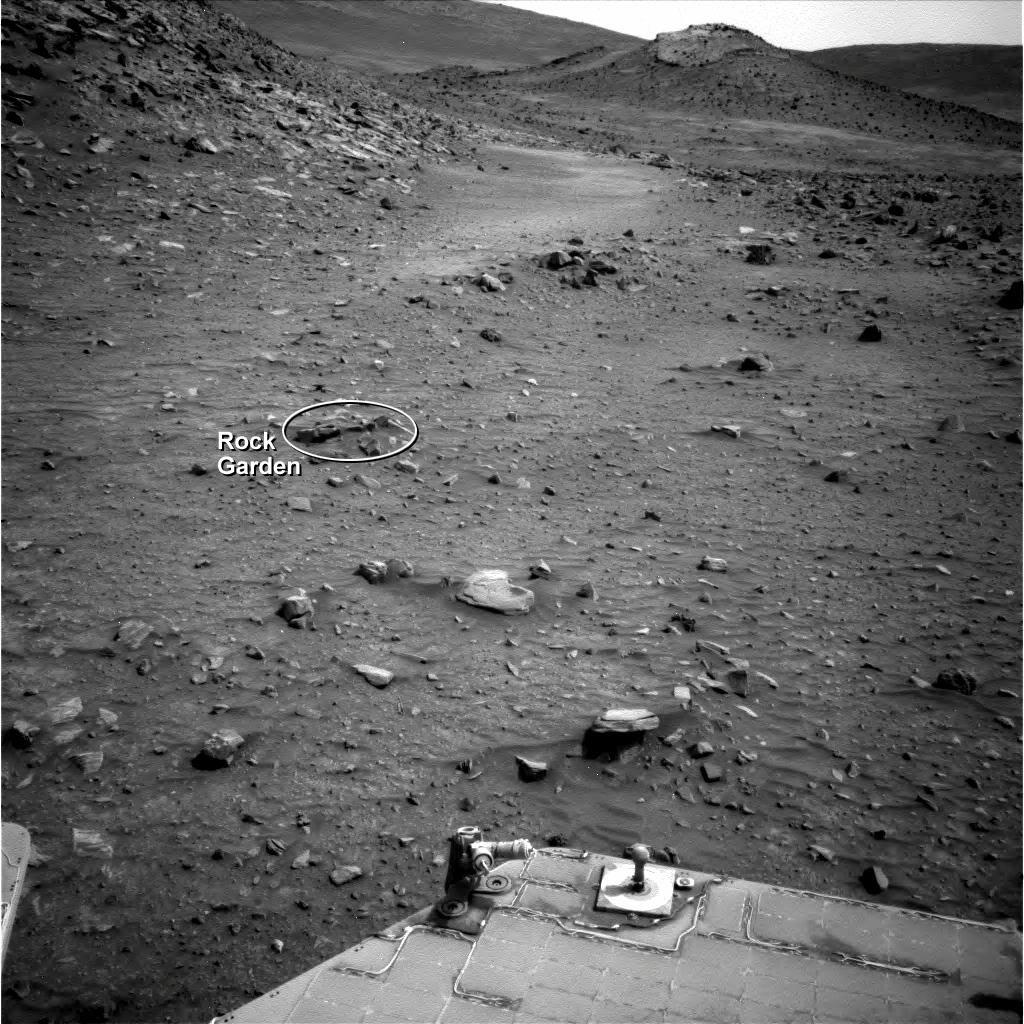 Scene of the slip
Scene of the slipThe cluster of rocks labeled Rock Garden in this image is where Spirit became embedded in April 2009. The rover used its navigation camera to capture this view of the terrain toward the southeast from the location it reached on its Sol 1870 (April 7, 2009). The ground just left of the center of the image is where Spirit became embedded later in April. Wheels on the western side of the rover broke through the dark, crusty surface into bright, loose, sandy material that was not visible as the rover approached the site. It turned out the rover had been snared by the edge of a shallow Martian sand-filled crater, now known as Scamander Crater. Credit: NASA / JPL-Caltech
The sole objective right now, of course, is to get Spirit off the sandy edge of Scamander Crater and onto Martian firma. “What we need to do is get enough motion to get the wheels back on solid ground before the belly contacts the ground,” Squyres said. “Once the belly comes into contact with the ground, we will have so much friction there we can't continue forward."
"That's why we're keeping a close eye on the glide slope parameters," added Arvidson. "We're early enough in the process that even though the rover sinkage has been more than we want to see, we are keeping with our [extraction] strategy."
"Right now, the numbers," Laubach reminded, "are still really, really small, so we haven't really been able to establish any true trends.”
Spirit’s energy fluctuated as usual throughout the month. The rover is still producing plenty enough energy to extricate itself, though its production levels did drop during the course of November, from a high of 359 watt-hours during the first week of the month down to 325 watt-hours during this past week. It is utilizing from 63% to about 58% of the sunlight reaching its solar arrays. The tau – or measure of dust in the atmosphere – also bounced around a bit, from 0.599 to 0.569 to 0.517 to 0.590, meaning the skies over Gusev Crater remained typically hazy.
In coming sols, Spirit will continue driving forward. “The deal with Spirit is we'll just keep on keepin' on,” said Squyres. “If we feel something is not working, we'll stop and reassess. So far, we are seeing forward progress. And while the glide slope has been too steep, we have the extraction plan, and we're executing it in increments and monitoring the rover's performance as we proceed. We’ll keep on doing what we're doing unless the data tells us to do something different.”
Once Spirit achieves about another 10-15 centimeters of forward progress, which will ostensibly put the rover out of danger from slipping onto Belly Rock, the pointed rock touching the rover's underbelly, it will then begin crabbing uphill, Arvidson announced. For now, however, Belly Rock remains a concern.
 The path to freedom?
The path to freedom?This view from Spirit's navigation camera near the top of its mast shows the tracks left by the rover as it drove southward and backward, dragging its inoperable right-front wheel, to the location where it broke through a crusty top layer in April 2009 and became embedded in soft sand along the edge of the sand-filled shallow Scamander Crater. The rover team's chosen strategy for beginning the attempt to extract Spirit from the sand trap is to follow these tracks out, heading north. The rover took this image during its Sol 2092 (Nov. 21, 2009), the day it performed the third planned drive of its extrication attempt. For scale, the distance between the right and left wheel tracks is about 1 meter (3 feet).
Credit: NASA / JPL-Caltech
“We haven't seen any major changes, nothing surprising or alarming in the character or configuration of Belly Rock, so we're just monitoring it," Squyres said. "Once we have reached the point we feel Belly Rock is no longer an issue, we’ll start crabbing uphill.”
Importantly, the team, and especially the rover drivers, are as energized and focused as they've ever been. “They are really excited and so happy,” offered Laubach. “We all were a little chastened after the first drive, but we all thought, 'Well okay, we knew we were setting the limits really tightly and we'll just grit our teeth and try again.' Then when the next drive gave us all the motion we wanted there was almost an eruption of joy. And we've had another successful drive since then. We all know it's too soon to get too excited. But on the other hand, Spirit is moving. The team is thrilled to be part of that. And there's a lot of good feeling. Optimism is still high.”
“We spent months studying and planning and getting reviewed, with time ticking by on Mars,” concluded Squyres. “To actually be turning wheels again and seeing Spirit move and respond has been great. This is a team that's good at doing stuff and now we're doing stuff again,” he added. “It's been good for everybody's morale. And we're now doing everything we can. We are convinced we're doing the right thing and we're doing the best we can. That's all you can ask."
Opportunity from Meridiani Planum
Opportunity drove out of October and into the first week of November, making admirable progress with five drives on its long journey to Endeavour Crater, which is still more than a year’s drive away if it can keep up its current pace. The rover headed south on Sols 2050, 2051, 2054, 2055 and 2056, (October 30, 31, November 3, 4 and 5, 2009) putting more than 260 additional meters (853 feet) on its odometer.
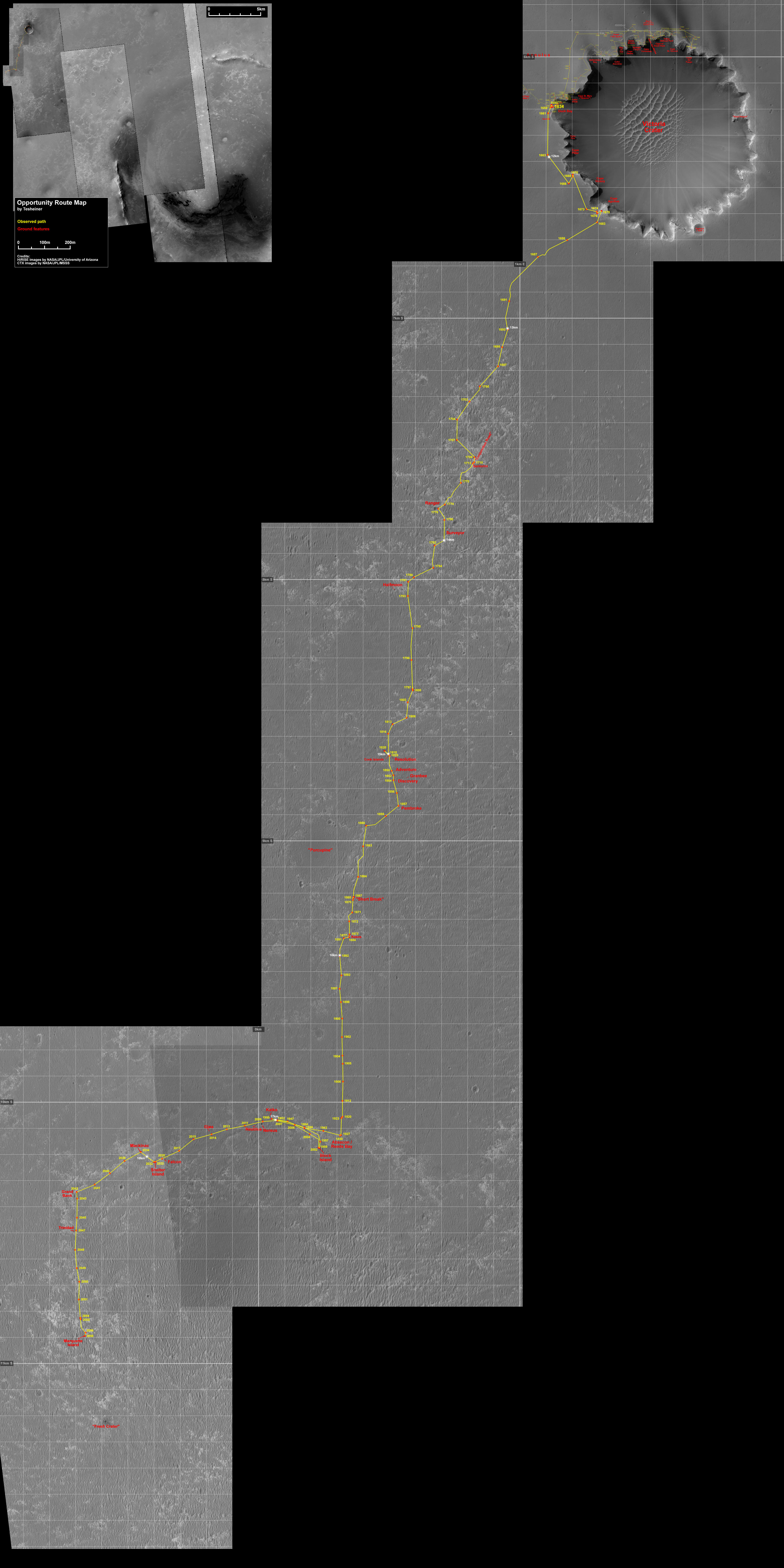 Opportunity route map
Opportunity route mapThis image, taken by the HiRISE camera onboard the Mars Reconnaissance Orbiter (MRO) was labeled by rover enthusiast Eduardo Tesheiner, a senior member of UnmannedSpaceflight.com, to chronicle Opportunity's route from Victoria Crater to Endeavour Crater. It shows the rover's travels up to Marquette Island, where it is currently hunkered down. Marquette is, according to P.I. Steve Squyres, the "most exciting find" for Opportunity in 2000 sols. Credit: NASA / JPL-Caltech / UA / Eduardo Tesheiner
While the driving was good, Opportunity’s right front wheel began “heating up” again, as the wheel's motor or actuator registered elevated currents. The team decided “a rest would be a good thing,” said Squyres.
“The elevated currents didn't seem to be out of family with what we had seen before,” Laubach elaborated. “It seems like the normal pattern. We need to watch it and rest once in a while. But there was no sign of anything different from what we've seen before and the timing was right. It seems to happen with Opportunity. Just when it needed to rest, there was a juicy science right there.”
“Marvelously," said Squyres, "right up in front of us was Marquette Island.”
So, on Sol 2058 (November 7, 2009), Opportunity ended the first week of November with a 15-meter (49-foot) drive to approach Marquette Island.
The team is naming the cobbles and rocks Opportunity is studying en route to Endeavour Crater after islands. “These cobbles are like little islands out in the sea,” as Squyres explained last November, one year ago. “And we’re going to see a lot of cobbles and there are a lot of islands.” Marquette Island the largest of the 36 islands in the Les Cheneaux archipelago of northern Michigan. Located in Mackinac County on the north shore of Lake Huron, it is 10.5 kilometers (6.5 miles) long and 5.5 kilometers (3.5 miles) wide and hosts a small summer population, according to Wikipedia.
As the second week of November set in, Opportunity continued on, taking a short jaunt of about 4 meters (13 feet) to move right up to Marquette Island on Sol 2061 (November 10, 2009). That drive put the rock within reach of the rover’s robotic arm or instrument deployment device (IDD) and by Sol 2063 (November 12, 2009), Opportunity had initiated a thorough investigation of the rock with its iron-detecting Mössbauer spectrometer and mineral seeking alpha particle X-ray spectrometer (APXS) to determine its composition. Two sols later, on Sol 2065 (November 14, 2009), the rover took some close-up pictures of the rock with its microscopic imager (MI) and added those to the mix of data.
Marquette was looking to be so distinctive to the Meridiani site that Opportunity would spend the rest of the month further investigating the chunk of rock. It used its rock abrasion tool (RAT) to lightly brush the rock to reveal the surface beneath the layer of dust on a spot the team dubbed Peck Bay.
“It's a closer match with rocks from the Spirit site than anything we've ever seen at Meridiani,” said Squyres. “It's fascinating.”
 Approaching Marquette Island
Approaching Marquette IslandOpportunity took this picture of a rock dubbed Marquette Island as it was approaching the rock for a close-up investigation. The rover used its navigation camera to snap this picture on its Sol 2056. The dark-toned rock stood out so prominently in more distant views on earlier sols that the rover team referred to it as "Sore Thumb" before assigning the Marquette name in accord with an informal naming convention of choosing island names for the isolated rocks that the rover is finding as it crosses a relatively barren plain on its long trek from Victoria Crater toward Endeavour Crater.
Credit: NASA/JPL-Caltech
As the sols wore on, Marquette Island proved to be something really unique, something that Opportunity has never encountered in more than 2000 Sols of exploring Mars. The science team debated the possibilities. It could be, they conjectured, a type of meteorite that the rover has never seen before or it could be ejecta from deep within the Martian crust that might provide clues to Mars' geologic past.
The rover completed its compositional research with its Mössbauer spectrometer and APXS on the brushed Peck Bay last week. Then, to gain additional information on Marquette Island, Opportunity repeated the same set of measurements on an adjacent target on Marquette called Islington Bay.
“One week ago I couldn't tell you if it's Martian or a meteorite,” said Squyres. “We know now it is a Martian rock. It's got a very low concentration of nickel, so it's not a meteorite. It's Martian. We're still working on it, so this is highly preliminary: it appears to be a coarse-grained igneous rock quite rich in olivine. We believe it also contains plagioclase and pyroxene. The closest match that we have ever seen with this would be some of the rocks we saw over at the Spirit site.”
Marquette’s composition means “it’s got to be a piece of ejecta from some far away crater,” Squyres continued.
Of course, they don't know where it came from or how far it traveled to get to where it is, but it’s not from Endeavour. “The reason I say that is because Endeavour is older than the sediments on which we are driving,” explained Squyres. “It' can't be Endeavor. It has to be something more recent than that. What we're probably seeing is some deep-seated sample of Martian crustal material. And it's different than anything we've seen before. It doesn't appear to be related geochemically to the Meridiani sediments at all,” he added.
“We believe the Meridiani sediments formed when acid ground waters interacted with a rock of basaltic composition,” Squyres continued. But the interaction was not with Marquette Island. “The elemental ratios don't match up at all. So this doesn't appear to have a relationship whatsoever – that we can see – to the sediments that we have been sampling at Meridiani. It appears to be something wholly new and different. And that's cool.”
 Brushing Marquette
Brushing MarquetteOpportunity used the wire brush of its rock abrasion tool (RAT) during its Sol 2070 (Nov. 19, 2009) to scour dust from Marquette Island. The brushed target area, called Peck Bay, is visible as a dark circle about 5 centimeters (2 inches) in diameter just below the tool turret at the end of the rover's robotic arm in this image. The rover took this image later the same sol with its front hazard-avoidance camera. Opportunity is performing an extensive analysis of this rock, which turns out, to be quite a Martian find.
Credit: NASA / JPL-Caltech
So cool in fact that Opportunity’s mission once again seems to have started anew.
“The reason we've been so focused in finding these rocks out on the plains – what we've been calling cobbles, although some of these are pretty big – is because we're trying to learn more about other parts of Mars that we haven't been to. Now we're doing that,” Squyres expounded. “Even though Block Island and Shelter Island and Mackinac Island were really fun and interesting because they are weathered, ironed meteorites and may be telling us interesting things about the weathering processes on Mars they are extra-Martian materials – they are not from Mars,” he pointed out.
“When I saw Block Island for the first time, I was disappointed that it was a meteorite,” Squyres admits. “I was hoping it was a Martian rock. We've been going to one of these things to the next to the next. We had three meteorites in a row. Driving up on Marquette, all of us sort of suspected it's going to be another one, and then it turned out to be this – a complete surprise. It’s absolutely wonderful.”
The last time Opportunity roved upon anything remotely like this at the Meridiani site, it was 2000 sols ago when it investigated Bounce Rock, right outside of Eagle Crater, into which it rolled to stop after bouncing down on the planet in January 2004. “I don't think many of us appreciated at the time just what a treasure trove Eagle Crater is,” Squyres said. Bounce Rock – so named because the rover’s descent airbags bounced right on it – is a piece of ejecta from far away that happened to be sitting right outside the landing crater and we haven't seen anything like that in 2000 sols. Now we have Marquette.”
Although Marquette is like Bounce Rock in that it appears to be a piece of ejecta from far away, that’s where the similarity ends. “It's from a very different place and it's a very different kind of rock,” Squyres pointed out. “We've really been working this thing over, using Pancam, the RAT brush, APXS, Mössbauer, MI, everything.”
After receiving the results of the RAT brush, the science team debated whether to look even deeper into the rock by grinding a couple of millimeters (about a tenth of an inch) into it and performing additional science observations.
“We have not yet decided whether to grind this thing," said Squyres. "The RAT teeth are a limited resource at this point. This is a hard rock, not like the soft sediments that one sees at Meridiani. It's probably as hard as Adirondack is. We're trying to get to Endeavour and I want the RAT working when we get there. But what did we design the RAT for? Situations like this. The question we face is: 'How much of the remaining RAT capability would we use up by grinding into this thing and how much would we learn scientifically and is it worth it?'"
 Marquette Island in enhanced color
Marquette Island in enhanced colorOpportunity is in the midst of an intensive, upclose study of the rock called Marquette Island pictured here in an image the rover took with its panoramic camera (Pancam).
Credit: NASA / JPL-Caltech / Cornell / color composite by Emily Lakdawalla
That puts them between a hard rock and a hard place, so to speak.
The scientists plan to make a decision on that soon, Squyres said. "It's going to be a good outcome whatever we decide. We're going to collect a lot of Mössbauer data and then get together and we're going to think about what to do next."
While at Marquette, Opportunity has also been taking a lot of pictures of the surrounding rocks. “There seem to be lots of fragments around Marquette that in all likelihood are pieces of the same stuff,” suggested Squyres. “When this thing fell, it probably broke into pieces and we're probably seeing a lot of the pieces lying around. Our suspicions are the stuff we're seeing around Marquette is more or less made up of the same stuff.”
Throughout November, Opportunity continued to open the elevation mirror on its miniature thermal emission spectrometer (Mini-TES) every sol in an attempt to clear some of the putative dust off the elevation mirror. To date, no improvement has been seen. “We're not seeing any improvement in the Mini-TES performance, but at the very same time we've been doing this, we've also seen a slow accumulation of dust on the solar arrays,” said Squyres. “It's just been a calm time of year at Meridiani and we'll just have to be patient. It's just a waiting game.”
Opportunity produced plenty of energy for driving and working in November, with power levels fluctuating from 376 watt-hours at the top of the month to around 400 watt-hours mid-month and about 370 watt-hours as November comes to a close. The rover is taking in and making use of about 53% of the sunlight hitting its solar arrays, under hazy skies with a tau – measure of atmospheric dust – fluctuating from 0.548 to 0.482 and back up to 0.512 at month’s end. The rover’s total odometry is 18,906.82 meters (11.75 miles).
As November falls away and December sets in, Opportunity will continue its examination of Marquette. “I had thought originally Marquette was likely to be another iron meteorite, that we'd take a few pictures and on we go,” said Squyres. “When we discovered it is what it is – that it's so different, that it's Martian, we knew this rock has a lot to tell us about Mars. We have a responsibility; a duty here to figure out everything it has to say before we leave it. We'll be here as long as that takes.”
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate