
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Spirit Waits to Bust a Move, Opportunity on Final Leg to Victoria Crater

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
August 31, 2006
The Mars Exploration Rovers, which bounced to landings in January 2004 with 90-day warranties, have survived their second winter solstice on the Red Planet and are still going strong more than two and a half years after landing.
The shortest day of the year in the southern hemisphere of Mars came and went August 8th and Spirit and Opportunity celebrated the milestone at their respective locations in Gusev Crater and Meridiani Planum the way they’ve celebrated just about all their momentous occasions, by working.
It may seem to some people as if these machines have taken on a life of their own, but “it’s just good engineering,” according to Steve Squyres, the rover principal investigator, of Cornell University. “Good, solid engineering and a bit of luck." And, now that the very depth of winter has passed, the Sun will begin rising higher in the sky and the weather will begin to warm up where the solar-powered rovers are, giving them both access to more sunlight, hence more power.
At Gusev Crater, Spirit maintained a fairly steady, though sluggish output of 280 watt-hours through August, averaging a little less than an hour's worth of work a day at Low Ridge, its winter digs in the Columbia Hills, according to Bruce Banerdt, project scientist, of the Jet Propulsion Laboratory (JPL), where the rovers are being managed. This rover is nearly finished with its months-long campaign of in-depth coverage of the area surrounding it and is now waiting for just a little more solar juice before it makes a turn to put the instrument deployment device (IDD) within range of some new targets.
On the other side of the planet, Opportunity, which celebrated its 900th sol this month and logged its 9th kilometer just last week, has been averaging 430 watt-hours of power, enough energy to complete its detour to and study of Beagle crater and hit the road again for Victoria crater. At nearly 800 meters (about half a mile) in diameter, Victoria promises to take this robot field geologist further back in Martian time than any crater it's visited at Meridiani Planum. As of this week, the destination that once seemed almost impossible to reach, was just 220 meters (722 feet) further to the south. “We’re so close now we can almost smell it,” said Squyres in an interview this week. First, however, the rover will finish checking out a trench it dug late last week in the annulus or apron of material that stretches out from Victoria, and then it will make one more pit stop at a series of fresh craters en route the big crater rim.
Overall, Spirit and Opportunity remain healthy and there has been virtually no change in the performance of their instruments this month. "I continue to be astonished," admitted Squyres. "In fact, the mini-thermal emission spectrometer (mini-TES) on Opportunity has been really getting cold lately. Whenever we use DeepSleep, which is usually every night now, it gets very cold. We void the warranty if we go below -40 Celsius (-40 Fahrenheit), the minimum flight allowable temperature, and we hit -60 Celsius (-76 Fahrenheit) the other night -- and the thing is still holding together." In fact, Opportunity used the mini-TES a lot this past month.
Although, both rovers have their new flight software onboard and are ready to boot into it anytime now, the team has not yet had the rovers start up in Version R9.2, because the ground tools are not ready. "When you use new flight software, you have to be ready on the spacecraft, and you also have to have all your software tools on the ground ready for it -- and that work is still being completed," Squyres explained.
The one feature on the new flight software that the scientists are especially looking forward to using is a “go 'n touch feature” that will improve the rovers' capacity to autonomously drive and take IDD measurements on rocks post drives. "Go and touch is a reversal of touch 'n go," said Squyres. "Touch'n go is a maneuver we've done many times where we have some rock or target in the IDD work volume that is reachable with the arm, and we make the a measurement on it, stow the arm, and drive away all in one sol. Go 'n touch is the opposite: when you've got some rock out of reach that you must drive to, you can make the drive and deploy the IDD onto it all in one day. We've never done that before because we haven't had the software onboard to allow us to do that. It requires very sophisticated software on the rover that you really trust, because if it goes wrong, you bang the IDD, and break something. But, obviously, if you can drive to the rock and immediately upon arrival the rover is able to figure out how to deploy the IDD safely, you san save an entire sol -- so this will be a real sol saver.”
Another “really cool,” new feature will give Spirit and Opportunity the capability of looking at transient phenomena, such dust devils or clouds, in a more "economical" way, by zooming in on the one section of an image that changes and imaging only that while keeping the same general background. This feature, said Squyres, essentially will allow them "to hunt" for dust devils. "The dust devil movies are cool and I'd like to get more of them. The ones we got in the past were mostly lucky shots and we did well with them. But we'd like to actively pursue these things, and if Spirit can survive until next summer and the next dust devil season, we'll actually have an active search for dust devil capability.”
Spirit from Gusev Crater
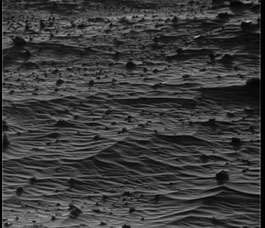 Shadowed ripples in the landscape
Shadowed ripples in the landscapeSpirit acquired this single-frame image of the sand ripples in the landscape surrounding its location in Low Ridge, its winter haven in the Columbia Hills, with the PanCam turned to an azimuth of 290 degrees or west-northwest.
Credit: NASA / JPL-Caltech / Cornell
Spirit figuratively rolled into August by searching for clouds with its navigation camera, after thoroughly examining Halley, the rocky target where the rover uncovered the first calcium found in Gusev Crater, and completing the humongous McMurdo panorama in July.
Throughout the month of August, Spirit continued working its winter science campaign at Low Ridge, in the Columbia Hills region of Gusev Crater, and now has nearly completed that research, at least in terms of where it has been positioned for the last 4 months.
During the first week of the month, Spirit acquired panoramic camera (PanCam) images of the soil target Tyrone, some detailed images of the El Dorado dune field and nearby ripples, as well as the surrounding areas, and acquired compositional data on a rock-and-soil target known as Halley Brunt Offset 2, using the alpha particle X-ray spectrometer (APXS). It also calibrated the microscopic imager (MI), completing the check-out of all the cameras, a task it began in July.
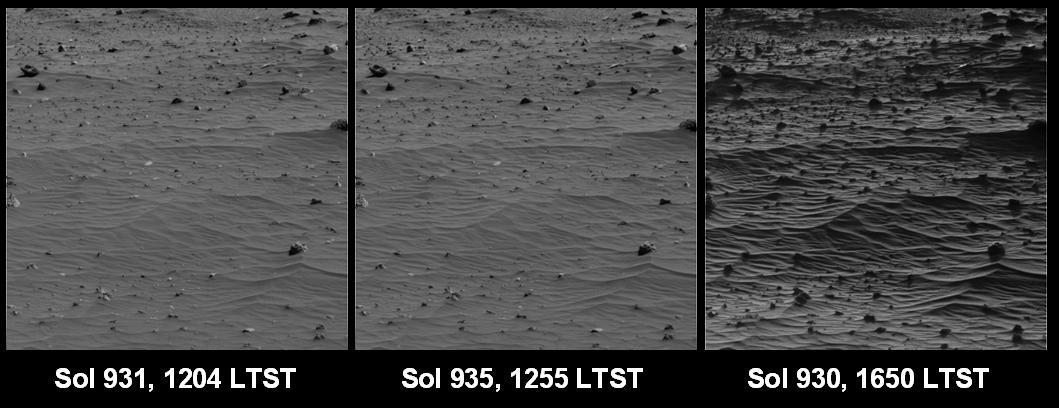 Ripples in the landscape
Ripples in the landscapeTaking advantage of lengthening shadows during the onset of winter and at different times of day, Spirit acquired this series of images that accentuate subtle features in the terrain. Images acquired at low Sun angles allow scientists to better understand differences in surface roughness among soils and rocks. Variations in how brightly sunlight reflects off surfaces under different lighting conditions help scientists estimate the microscopic physical characteristics of the mineral grains in different rocks and soils. Shadows from the rover itself are visible in the foreground of the late-afternoon mosaic and cover part of the rover's tracks and disturbed, light-toned soils.Credit: NASA / JPL-Caltech / Cornell
To calibrate the MI, the team has to measure electronic noise via a process known as a photon transfer observation. Basically, Spirit acquired 20 pairs of images, each pair taken during a different exposure time. Engineers used these images to form a baseline for estimating unwanted electronic signals picked up by CCDs (charge-coupled devices, the imaging sensors that convert light into electrical current) in the MI, according to a Poisson distribution, a theory that expresses the probability of a number of events occurring in a fixed period of time if these events occur with a known average. Using this probability theory, engineers correlated the signal measured by the camera with differences in signals acquired in the image pairs to calculate the efficiency with which the camera's imaging sensors convert photons from sunlight into electrical energy. (They used the same approach to characterize the electrical system's ability to translate measurements of voltage into digital numbers.)
Spirit also initiated a series of studies in the first days of August that it carried out throughout the month: observing and measuring the amount of dust or opacity of the atmosphere,called taking a tau measurement, with the PanCam; surveying the sky and ground with the mini-TES; and acquiring fill-in images for the McMurdo pan, dubbed "grout" by engineers. In fact, that's exactly how the rover spent the day of the Martian Winter Solstice, on Sol 923 (August 8, 2006).
By the middle of the month, Spirit was packing in all kinds of imaging assignments, including Halley Brunt up close with the PanCam and MI. On Sol 931-32 (August 16-17, 2006), the rover used the PanCam to take pictures of the target Korolev, and the mini-TES to make measurements of a possible meteorite target, Vernadsky. On Sol 933 (August 18, 2006), the rover acquired super-resolution images of a basalt hill dubbed Dome Fuji with the PanCam and monitored dust on the PanCam mast assembly. The rover used the PanCam again to capture images of a rock target called Prat, on Sol 935 (August 20, 2006), and later that sol measured the magnitude of sunlight.
 Dome Fuji
Dome FujiSpirit took this raw image of Dome Fuji with the left PanCam on Sol 933 (Aug. 18, 2006) at approximately 12:09 local solar time.
Credit: NASA / JPL / Cornell
In recent days, the rover acquired data from a rock named Wasa with the mini-TES, acquired MI pictures of a ripple called Palmer, scanned for wind-related changes in a sand target known as Rothera, and acquired super-resolution, PanCam images Vernadsky. On Sol 939 (August 24, 2006), Spirit acquired super-resolution PanCam images of a target known as Scott Base. Since then, the rover has acquired mini-TES data on a rock target known as Law-Racovita, and collected more data about elemental composition of the rock target called Halley Brunt.
Despite its lack of energy and light workdays, Spirit was accomplishing the tasks with relative ease and getting the work done, so the science team was able to move down its wish list of tasks, Banerdt said, and add to the McMurdo pan by acquiring images of the rover deck with the PanCam. “We're doing a deck pan so that when we glue this whole thing together, it's going to be from the horizon down to the deck -- 360-degrees around,” Squyres said. “It is the biggest picture we've ever taken and it’s going to be pretty good. The McMurdo panorama is probably 8 or 9 Imax screens worth of data, a ridiculous amount of data. The only problem is coming up with a computer monitor with a display that's big enough to view it.”
As awesome as that panorama is going to be, the team is getting cabin fever and is anxious to move on. In fact, as soon as possible, the science team plans to have Spirit change position. "We are eager to move the rover a little bit to bring some new rocks and soils into the IDD work volume to give us something new to work on as we wait for spring to come,” said Squyres. The rover's current low energy output, however, is putting the move on hold temporarily.
"Spirit's [power output] is in the high 200s now, which is as low as we expected to get," Squyres reported. "We just went through the solstice, and we should have bottomed out power-wise right around now and we expect to see the power climb back up.” While the predictability of the Sun is critical to the solar-powered rovers, there are numerous factors that affect how much power Spirit gets, including the rover tilt, as well as how much dust there is on the solar arrays and in the atmosphere. While Opportunity had an unexpected cleaning event last month, Spirit has been taking on all the dust floating about it. "It’s not yet built up on the solar arrays to an exceptionally bad level, so we're doing okay," Squyres reported. Nevertheless, he added, “we expect to see some fluctuations on top of that slowly rising curve.”
When the command is sent from Earth, Spirit will make the turn very carefully to make sure it doesn't lose any tilt. As Ray Arvidson, the deputy principal investigator, of Washington University St. Louis, put it in last month’s update: "That tilt to the north to catch the Sun is beaucoups important.”
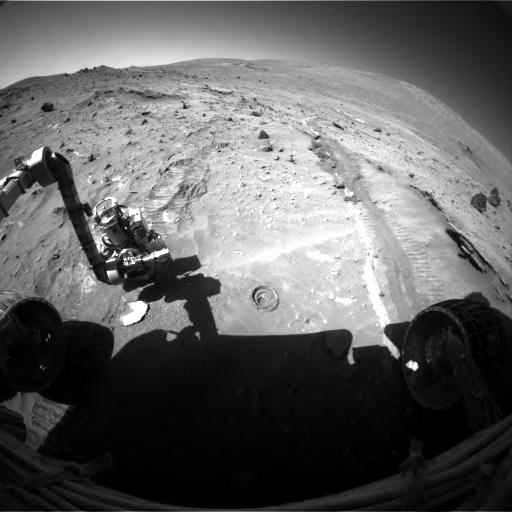 Tracks in view
Tracks in viewSpirit took this raw image with its right front hazard camera on Sol 942 at approximately 12:49 local solar time. In the right hand quarter of the image, you can see the deep wheel tracks and the flat, plated rock the rover will be examining soon.Credit: NASA / JPL
"We are really at the very lowest part of the power curve for the year right now and even though the calculations suggest that turning the vehicle to the right should not change the tilt much, even if it changes the tilt by a small amount, even 2 or 3 degrees in the wrong directioncould have a pretty adverse effect on the power system,” Squyres expounded. “We want to let than number, which has been as low as 270, creep up so that it's in the 290-300 kind of range. That gives us a little headroom, enough margin so that if the turn did give us an adverse tilt of a couple of degrees we could handle it," he explained.
The impending turn will be the first centimeters Spirit logs onto its odometer -- which has been idle at 6,876.18 meters (4.27 miles) -- since pulling into Low Ridge last April. The debate about which way to turn, however, is over, Squyres informed. Spirit will make a clockwise turn to the right, where the rover's gimpy right front wheel, dug a little trench as it pulled in backwards to its winter home. "That trench right now is just out of reach, but when we turn to the right it will be within reach," he said. "We see little flecks of bright materials we think might be some kind of sulfate salts that are exposed within that trench. And, just to right of wheel tracks, there is a wonderful outcrop of finely layered bedrock right there."
Although Spirit is pretty well done with its winter science campaign from the position in which it is situated now, the science team has plenty of things to keep the rover "very productively occupied" until the rover can make the turn, Squyres said. It's been a long time since they've looked, for example, at the magnets, mounted on the rover body with the APXS and the Mössbauer spectrometer. "We are going to do that soon," he said. Truth told, however, they will make the turn as soon as Spirit has enough power margin to do it. "And we're really anxious for spring to come," Squyres added, "so we can actually get moving again."
Opportunity from Meridiani Planum
The unexpected cleaning event Opportunity experienced in July gave this rover a noticeable boost in energy going into the Martian Winter Solstice. Through the month of August, it consistently averaged 430 watt-hours of power. “For the dead of winter, that's pretty good, and that's [with the rover on] flat terrain too, with no tilt,” Squyres noted. “It's just the difference in latitude – this rover is a lot closer to the equator than Spirit and the winter at Meridiani is much less severe than the winter at Gusev,” so that may also have something to do with why Opportunity has what seems like a bounty of energy compared to Spirit.
As July gave way to August, Opportunity investigated a patch of outcrop thought to be representative of the Martian surface beyond the reach of materials excavated by the impacts that dug Beagle and larger Victoria crater, and completed the detour to Beagle crater, and got back on the road. On Sol 893 (July 29, 2006) the rover used its rock abrasion tool (RAT) to grind away the surface of a rock in that outcrop called Baltra, and began an in-depth study of the rock target. It was the first time since Sol 691 (January 3, 2006) that the rover had used its RAT. The team is being somewhat cautious with it since Spirit's ground down leaving only the brush operable. With the 3-milimeter hole (0.12-inch hole) abraded, the rover took MI pictures, collected data with the APXS and the Mössbauer spectrometer, and took images of the magnets on the RAT both before and after the grind.
 Beagle bowl
Beagle bowlOpportunity acquired this false-color image of the rim of the 35-meter (115-foot) diameter Beagle crater on Sol, 894 (July 30, 2006) using the PanCam's 753-nanometer, 535-nanometer, and 432-nanometer filters. At the time the rover was about 25 meters (82 feet) from the crater, looking east-southeast. In the image, you can see ejecta blocks near the rover, the largest of which is about 50 centimeters (20 inches) across, as well as a portion of the eastern interior rim, which appears composed of jumbled, angular blocks of brighter and darker outcrop rocks. The rover drove to the rim of Beagle and acquired numerous images to be used in big, mosaiced pictures.
Credit: NASA / JPL-Caltech / Cornell
In the sols that followed, Opportunity acquired PanCam images of the rim of Beagle Crater, a transitional area around Beagle Crater dubbed Española, and PanCam a flat rock target known as Bartolomé. The rover then turned its attentions again to Baltra to continue a Mössbauer analysis.
The rover literally backed into August on Sol 896 (August 1, 2006), 1 meter (3.3 feet) and acquired color images of Baltra, using all 13 filters of the PanCam, then drove 21 meters (69 feet) toward the rim of Beagle Crater. At the end of that drive, the rover acquired images of the terrain using the navigation camera, as well as the PanCam. The scientists want to compare the soil around Beagle crater to the Victoria Annulus.
Opportunity spent much of the rest of the week just like its twin, devoting time to collecting atmospheric dust or tau measurements and surveying the sky and ground with the PanCam and the mini-TES. Since the rover has been going into DeepSleep regularly and because the mini-TES is supposed to be sensitive when it comes to cold weather, everyone on the science team is marveling about how the mini-TES has held up. The rover, meanwhile, has taken advantage of the instrument's resilience and also conducted untargeted remote sensing of infrared energy and dust using the mini-TES (beginning with looking at the calibration target), as well as the PanCam.
On Sol 898 (August 3, 2006), the rover acquired PanCam images before driving 5 meters (16 feet) up to the rim of Beagle Crater. After the drive, Opportunity acquired images with the navigation camera and more data on the crater with the mini-TES, then roved into a 3-day weekend of imaging Beagle crater and the surrounding area.
During those first days of August, Opportunity also took a series of large images with the PanCam for mosaics of Beagle crater, called Beagle Pan A, B, C, and D. The rover also acquired images of a target known as Fernandina, morning PanCam images of targets Camarhynchus and Cactospiza, and a portion of the sky, and made observations of another target dubbed Darwin with the mini-TES. After checking for drift (changes with time) in the mini-TES, it acquired mini-TES data from Camarhynchus and another target dubbed Geospiza, and PanCam images of Platyspiza.
Then, on Sol 902 (August 7, 2006), at 11:19 a.m. local solar time, something happened and a spacecraft fault put the rover in a safe state. The anomaly occurred while Opportunity was collecting images with the PanCam. In short, it caused the rover's fault protection software to interrupt operations, place the rover in a safe state, and reboot the flight software. On waking up after the reset, the rover flagged the positions of the high-gain antenna and PanCam mast assembly as unknown, and then sat in automode. That means the rover did not attempt to execute a master sequence of activities for the day.
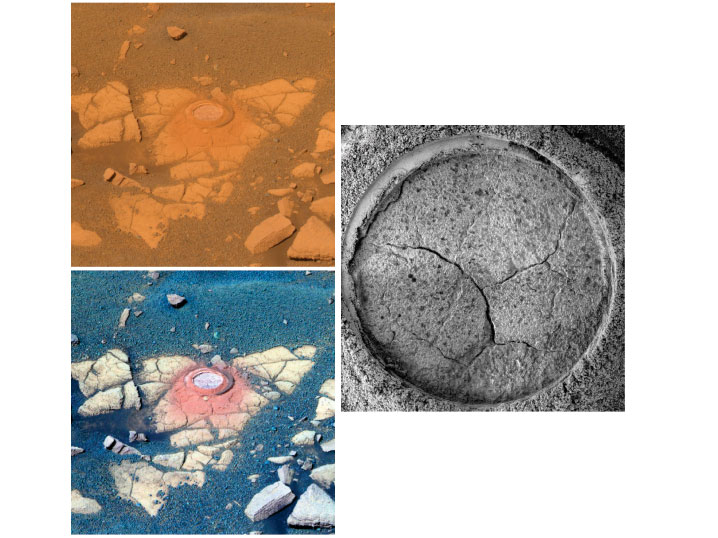 Baltra
BaltraFor the first time in nearly 100 sols, Opportunity stopped about 25 meters (82 feet) from the southwest rim of Beagle crater to analyze an exposure of rock near Beagle crater, dubbed Baltra. The rover ground a 3-millimeter-deep (0.12-inch-deep) hole in the rock using its RAT and then checked it out up close. The two color images shown here are from Opportunity's Pancam. The black-and-white image is from the rover's microscopic imager. The Pancam images were acquired shortly after noon on Mars on sol 896 (Aug. 1, 2006), after Opportunity had ground the hole and analyzed the rock with its chemical and mineralogical spectrometers. At upper left is an approximately true-color PanCam image. At lower left is a false-color image, which emphasizes differences in rock and soil materials. The rover acquired these PanCam images after backing up 1 meter (3.3 feet) from Baltra to assure that the target was in sunlight.
Credit: NASA / JPL-Caltech / Cornell / USGS
The next 2 days -- Sols 903 and 904 -- were primarily dedicated to the engineers retrieving diagnostic information from the rover. The rover's handlers transmitted instructions to Opportunity to re-establish the position of the high-gain antenna and, subsequently, the position of the PanCam mast assembly. On Sol 904, the rover successfully reacquired the sequence of PanCam images that had been terminated by the fault and collected the assigned scientific data. By the following sol, the rover was completely restored to normal operations. Although the engineers were unable to find a credible explanation for what caused the anomaly, the rover resumed the work it was doing before the fault, specifically a campaign of science observations of the area around Beagle crater that included an analysis of laminated ripples using instruments on the rover's IDD.
Opportunity was then given a 3-day weekend assignment of driving. On Sol 907 (August 12, 2006), the rover drove 31.4 meters (103 feet) away from Beagle crater toward a ripple or sand dune of interest, then took images with the PanCam, navigation camera, and hazard-avoidance cameras. It spent the following day performing a navigation camera experiment and making observations with the mini-TES. Then, on Sol 909 (August 14, 2006), the rover drove the final 4.27 meters (14 feet) up to the ripple and examined it with the MI, the APXS, and the mini-TES.
The rover didn't skip a beat, completing task after task as the new week began. On Sol 910 (August 15, 2006), Opportunity imaged targets dubbed Isabela and Marchena up close with the MI, and then checked Marchena out with the APXS. On the following sol, it moved the IDD out of the way and took pictures of the area where it would later use the APXS, checked out targets Pinzon and Pinta with the mini-TES, and completed a reading of Isabela with the APXS after the regular Odyssey communications pass.
Opportunity closed out that week taking pictures of the foreground using the PanCam and all its 13 filters, gathering a systematic foreground raster with the mini-TES, using the navigation camera in support of that spectrometer. The rover also used the mini-TES to determine the composition of a boulder called Tenerife and Tenerife BG, a soil target near the boulder.
The weekend was, once again, made for driving and on Sol 14 (August 19, 2006), Opportunity drove 71.72 meters (235 feet), then took images from its new position with the navigation camera and the PanCam, and used the mini-TES to for its sky and ground surveys during the afternoon communication-relay pass of Odyssey, as had become something of a routine in August. In addition, as a test to aid the design effort for NASA's 2009 Mars Science Laboratory (MSL). The rover used its navigation camera to take an image of the sunset. The exercise was designed to help in development of an algorithm for determining the rover's position using the Sun and the time of day.
Last week, the rover conducted monitoring of dust on the panoramic mast assembly -- essentially the rover's "neck" and "head" -- used the PanCam to survey clasts or rock fragments. Then, on Sol 916 (August 21-22, 2006), the rover drove, backwards, for 88.82 meters (291 feet), and the following sol logged another 77.27 meters (254 feet) backwards. At the end of that drive, Opportunity took mosaics of images with the navigation camera and also took a PanCam 13-filter foreground image.
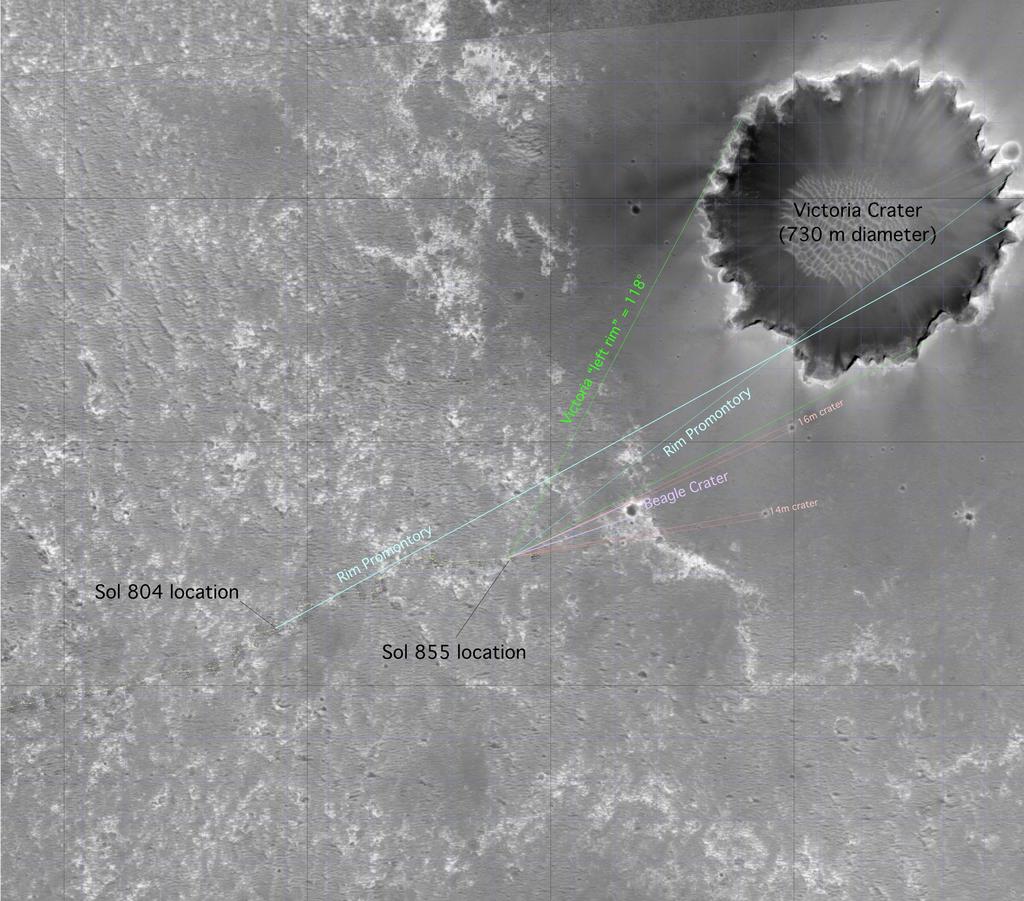 Victoria crater
Victoria craterThis image from the Mars Orbiter Camera onboard Mars Global Surveyor highlights the Opportunity's approach toward Beagle crater. North is to the left. Opportunity's locations at Sols 804 (April 29, 2006) and 855 (June 20, 2006) are marked, as are the left and right edges of the rim of Victoria crater from the rover's point of view. The labeled "promontory" is a bright spot that scientists originally thought was an outcrop but further investigation indicates this outcrop must instead be on the near rim of the crater. Marked in salmon are two small craters beyond Beagle crater that are on the dark "annulus" or ring, around Victoria crater. This image is an uncalibrated version that the rover team uses for planning. It has been reprojected and stretched in some places and isn't used for scientific purposes.Credit: NASA / JPL-Caltech / MSSS / OSU
To both the engineers' and the scientists' delight -- and relief -- the driving has been almost like blacktop compared to the rippled sand dunes it's been traversing for months on the way south to Victoria. "It's much easier driving," said Squyres. "It's such a thrill not to have to deal with those big, damn ripples anymore -- we're finally done with those. That is such a relief, so we've been ripping off these 70 and 80 meters drives. It's back to hard-packed flat sand like it was outside Eagle crater. Actually this terrain is very similar morphologically to what we saw when we drove from Eagle to Endurance and that was very easy driving."
On Sol 918 (August 24, 2006): Opportunity conducted some untargeted remote sensing, including taking a PanCam albedo measurement, a navigation camera rear-looking mosaic, a front hazard avoidance camera image for potential robotic-arm work, and a mini-TES 7-point sky and ground observation. And, keeping to the routine, the rover also took a PanCam tau measurement before the first of two Odyssey passes, and a mini-TES sky and ground survey during the first Odyssey pass.
The following sol Opportunity took a PanCam image of the location selected for trenching, then advanced 2.3 meters (7.5 feet) and used a different wheel than ever before to dig the trench. "We dug this trench and we haven't done that in a long, long time," said Squyres. "Back in the early days of the mission, we came up with a technique for digging trenches. Rob Sullivan, from the science team, and Jeff Biesiadecki, from the rover planner team, invented this technique -- a very intricate kind of dance the rover would do, scooping the soil back and forth with the front wheels, and it really was quite a production. Of course they mastered it in the testbed on Earth before we ever tried it on Mars. Then we lost the right front steering actuator on Opportunity that took away that ability to do that maneuver."
But a broken steering actuator was no good excuse for this team. "Rob and Jeff and others wanted to see if they could figure out a way to dig a trench without using that steering actuator, so about a month ago, Rob went out to JPL and he and a bunch of the rover planners got together and spent quite a bit of time in the testbed trying this and that," Squyres said, continuing the story. "They finally found a set of maneuvers that is able to dig a very respective trench without using that right front steering actuator at all. It's a very clever maneuver and in the end you get quite a nice looking trench. So we did that late last week and it worked very nicely."
Opportunity -- which logged its 9th kilometer (about 5.6 miles) with all the recent driving -- is now well into the Victoria Annulus. "We're just sort of midway across the annulus, and we thought if we're going to sample it, we should do it with a trench, because the surface material seems to be the usual blueberry lag and basaltic sand that we've been seeing all along," Squyres explained. "Now that could be just a wind-transported veneering, so we want to dig down underneath to get the kind of materials as representative of the annulus as possible."
The plan was to take a set of measurements with the instruments on the IDD before moving on. But when they tried it this past weekend, Opportunity suffered a stall on the shoulder azimuth joint, the same shoulder joint it had trouble with some months ago. "We think that was just kind of a fluke," said Squyres. "It's the motor where we broke the winding sometime back and it's a little bit persnickety. We think it was just kind of a bad day."
The engineers ran some diagnostics and sure enough, it must have just been a bad day. "There was a little bit of anxiety over the weekend, but it turned out not to be a problem," Banerdt reported. "The results that came back found no problem with the arm at all. Whatever it was, it was a transient problem and we're re-doing that sequence."
Once the task of checking out the trench up close is done, Opportunity will hit the highway for Victoria crater, once again. But there's "one more piece of business" that will come before the rover is allowed to pull up the rim, Squyres said. "There's a little cluster of craters between us and the rim. They are apparently fresh craters, at least 1 or 2 are, and they clearly post-date the Victoria impact. They sort of excavate in to the ejecta blanket we think, and they made provide a little road-cut into the blanket which would be a nice thing to be able to investigate."
Science team members have named the craters in this cluster after the boats that were Major John Wesley Powell used on his expeditions down the Colorado River and the Green River -- Emma Dean, Kitty Clyde's Sister, Maid of the Canyon, and Canonita. [Powell is famous for a three-month river trip -- known as the Powell Geographic Expedition -- down the Green and Colorado Rivers in 1869 -- which included the first passage through the Grand Canyon.]
"We're going to sort of sideswipe Emma Dean on our way to the rim of Victoria," Squyres said, "so we'll pull up to Emma Dean and take a look. Then, depending on what we see, we may stop and make a few measurements there before we go on. But basically, it's the trench, Emma Dean, and then the Victoria rim -- and the rim is only 220 meters away, so we are close enough to almost smell it."
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate