
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Spirit Rests on Big Find, Opportunity Finishes Half-Marathon on Way to Endeavour

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
June 30, 2010
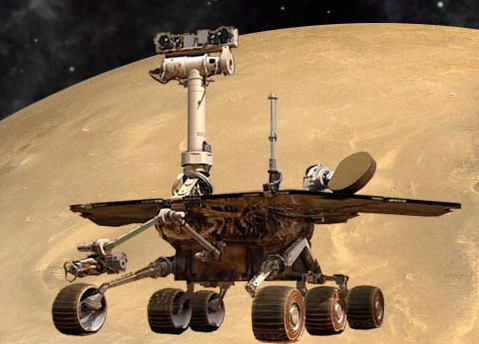 Mars Exploration Rovers
Mars Exploration RoversCredit: NASA / JPL-Caltech
With winter still freezing the southern hemisphere of Mars, June might have been an uneventful month for your average working robot, but not the Mars Exploration Rovers (MERs). In fact, from the sounds of silence to a major discovery to an injury scare, the rovers’ latest trials, tribulations and achievements, have turned the last four weeks into something of an emotional roller-coaster for some members of the MER team.
At Gusev Crater, Spirit continued to hibernate. “We haven’t heard anything yet, but we continue to listen everyday,” reported John Callas, MER project manager, of the Jet Propulsion Laboratory (JPL), where the rovers were designed, built, and are managed. There is no way to check Spirit’s vitals until she phones home, but the team feels confidant that the rover is hunkered down and re-charging her two main power batteries as programmed to do. In the meantime, operations team members are making sure they’re ready for the beeps of a communiqué they expect sooner or later from Spirit.
Asleep or not, Spirit managed to star star in the biggest news story from Mars this month, perhaps this year. A group of MER scientists led by Dick Morris of the Johnson Space Center (JSC) in Houston, announced that an outcrop Spirit examined back in 2005 is harboring carbonates. Translation: the bedrock was comprised of minerals that are undeniable evidence of past fresh water, or near neutral water as the scientists call it, and an environment more favorable to life than any other found anywhere to date.
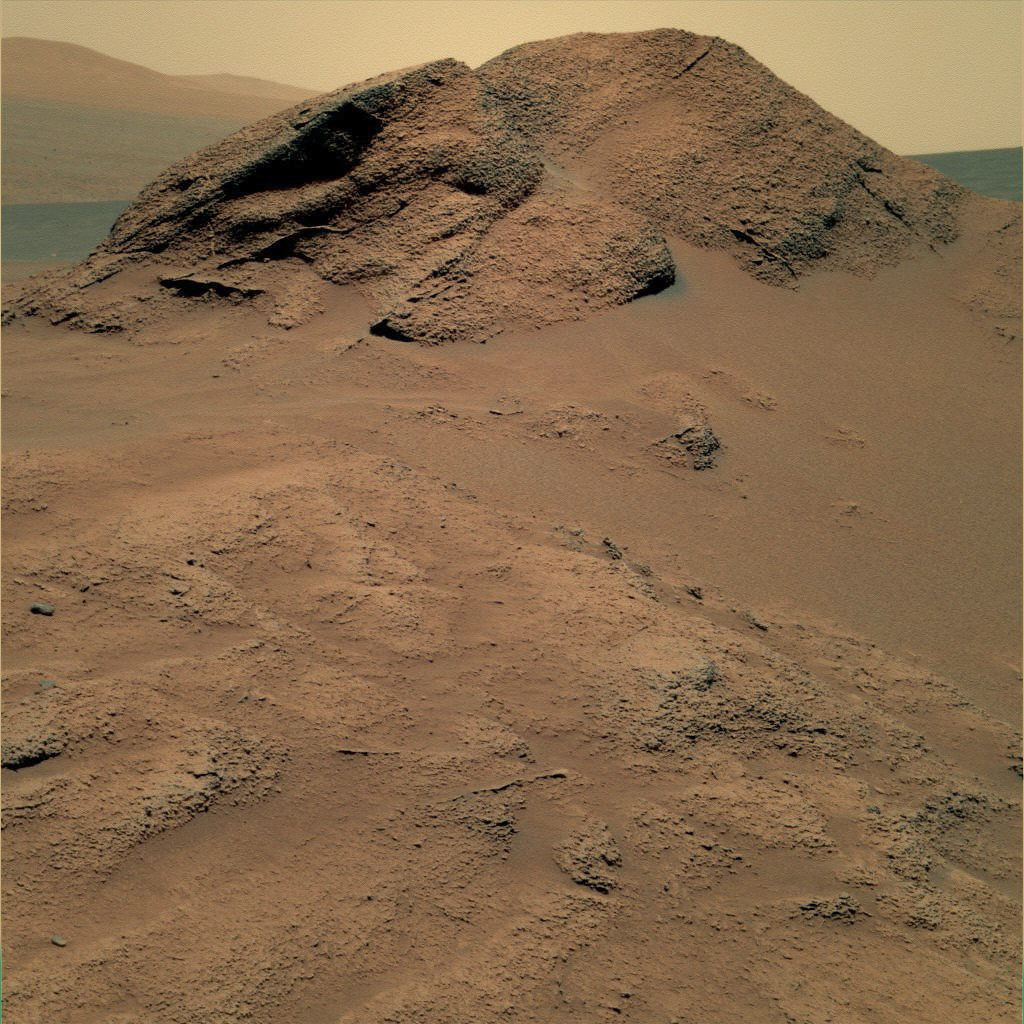 Comanche in Martian color
Comanche in Martian colorComanche just looked different. The scientists generally believe it's the remnant of something larger, "perhaps a volcano or bed of volcanoes," says Ray Arvidson, MER deputy principal investigator and a co-author of the paper. But one they do know now: it's loaded with carbonates.
Credit: NASA / JPL-Caltech / Cornell
The groundbreaking, groundtruthing finding was announced in an article published by the journal Science online June 3rd. Planetary scientists have been looking for carbonates on Mars for decades, so not surprisingly, the news sent the mission and the rover back into the media spotlight. The story of the discovery is covered extensively in an MER Special Update.
In summary: although Spirit and Opportunity both found evidence for water in their primary mission and since then, the findings in each setting indicated the water had been acidic, noted Steve Squyres, of Cornell University, the principal investigator of rover science and a co-author of the landmark Science paper.
Finding carbonates immediately meant this water was different, chemically different. It was more alkaline, more conducive to origin of life than acidic water, and more like what we humans would consider fresh water, albeit hard water. The chemical distinction made it a textbook changing finding for the whole field of planetary exploration.
Of all the data collected and evidence found by both Spirit and Opportunity, the outcrop dubbed Comanche, which Spirit encountered on her hike down from Husband Hill, is, simply put, the best evidence found by either rover to date for a past environment on Mars that may have actually been nourishing for life. “This is easily one of the top five findings on the mission,” Squyres summed up.
What that environment looked like back when the water trickled or flowed “will be debated for years,” Morris said earlier this month. But the long-sought discovery of carbonates on Mars marks another first for the MER mission. It also serves as another step forward in the search for life on a planet beyond Earth, if only in bolstering the plausibility of theories that Mars was once long ago more like Earth, warmer and wetter.
Remarkably, it’s a discovery that comes seven years after the rovers left Earth for a three-month tour.
 MER 's anatomy
MER 's anatomyThe Mars Exploration Rovers are robot field geologists that were designed with parts to substitute for the organs all living creatures would need to stay "alive" and able to explore, as well as some super-human powers. Spirit and Opportunity, for example, each have a body that protects its "vital organs;" brains to process information; temperature controls, including internal heaters, a layer of insulation, and more; a "neck" and "head" formed from a mast for the panormaic cameras for a human-scale view; eyes and other "senses," such as cameras and instruments that give the rovers information about their environment; an arm to extend its reach; wheels and "legs," necessary parts for mobility; and energy sources in the form of batteries and solar panels; and antennas for "speaking" and "listening."Credit: NASA / JPL-Caltech
The world’s favorite robot field geologists do have their downtimes though. Over on the other side of the planet, at Meridiani Planum Opportunity began the month at a standstill, with a possible injury to her “neck,” something that caused the team some tactile anxiety.
“We were kind of dead in our tracks troubleshooting what we thought was a problem with the PMA actuator,” recalled Squyres.
The rover’s Pancam mast assembly, better known as the PMA, functions as a periscope for the miniature thermal emission spectrometer (Mini-TES) that is housed inside the rover body for thermal reasons, and provides support, height, and a better point of view for the Pancams, the rover’s setero-vision “eyes.” One motor for the entire PMA head turns the stereo cameras and Mini-TES 360º in the horizontal plane. A separate elevation motor can point the cameras 90º above the horizon and 90º below the horizon. A third motor for the Mini-TES elevation enables the Mini-TES to point up to 30º over the horizon and 50º below the horizon.
Engineers examined Opportunity from afar and found both rover and PMA to be fine, which was good news. But the mystery of what happened deepened.
“That was a scare,” admitted Squyres. “If we would have lost that actuator, it would have meant Opportunity couldn’t turn its head. We would have worked around and kept going, but it would have complicated the use of that vehicle.” Diagnostic testing and analysis are still underway, but it soon appeared that the PMA was fine all along. “When we found the evidence that the actuator was fine, it was an enormous relief to everyone on the project,” said Squyres
“But the Mini-TES is not so good,” continued Ray Arvidson, of Washington University St. Louis, deputy principal investigator for science. The problem apparently had emanated from the Mini-TES and the spectrometer, which has been unusable because its mirrors are obscured with dust that pounded the rover during the global dust storm of 2007, is now turned off. Engineers at JPL and the spectrometer’s team at Arizona State University (ASU) and others are working on figuring out why the Mini-TES failed to send a sign-off signal to the PMA.
After giving the team a bit of a scare, Opportunity has spent the rest of the month being her dutiful trooper self. By mid-month, the rover was back on the road, heading due east toward to the big crater dubbed Endeavour and making tracks with long drives. “We’re just driving and crossing ripples … 70 meters in a cloud of dust every day,” said Squyres.
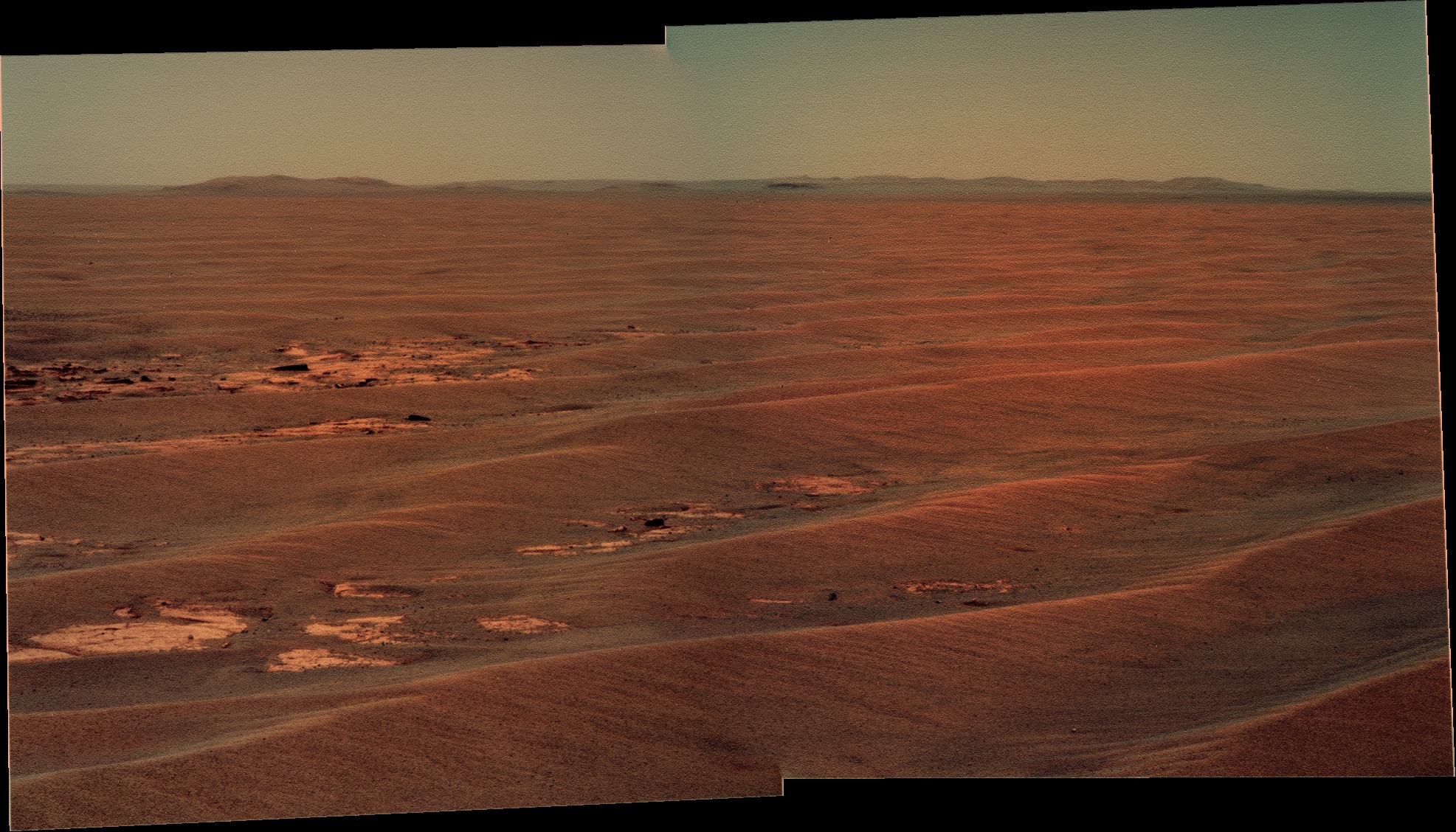
 Endeavour hills in super-res
Endeavour hills in super-resAs promised last month, here is the Pancam super-res image of Endeavour Crater on the horizon. Since the summer of 2008, when Opportunity finished two years of studying Victoria Crater, its long-term destination has been the much larger Endeavour Crater to the southeast. By the spring of 2010, the rover had covered more than a third of the charted, 19-kilometer (12-mile) route from Victoria to Endeavour and reached an area with a gradual, southward slope offering a view of Endeavour's elevated rim. On its Sol 2239 (May 12, 2010), the rover used its Pancam to take multiple exposures of the horizon toward the southeast. The Pancam team combined these images into this super-resolution view showing details of a portion of the rim of Endeavour about 13 kilometers (8 miles) away plus more-distant features. Super-resolution is an imaging technique combining information from multiple pictures of the same target in order to generate an image with a higher resolution than any of the individual images. Above the dark plains in the lower portion of the view, the horizon in the left half is mostly a portion of Endeavour's western rim. The paler-looking terrain on the horizon beyond Endeavour in the right half of the image is part of a thick deposit of material ejected by the impact that excavated Iazu Crater, south of Endeavour. The observed increase in brightness of Iazu's ejecta relative to Endeavour's features is consistent with modeling by science team members Michael Wolff, of the Space Science Institute, and Ray Arvidson, of Washington University in St. Louis, applying optical characteristics Opportunity has measured in the Martian atmosphere.Credit: NASA / JPL-Caltech / Cornell
“We’ve been averaging driving three times a week for the past couple of weeks,” Callas elaborated. “And we crossed the half-marathon in odometry this month, 13.1 miles. Now, we’re going to go for a full marathon.”
Endeavour, at 22 kilometers (13.70 miles) in diameter, will be the largest crater Opportunity will ever visit. The Pancam view of the crater rim or the Endeavour hills, as they have come to be known, seems to have reinvigorated team members. “It is so good, so nice to see details, especially in the Pancam images you can see lots and lots of detail,” offered Paolo Bellutta, of JPL, one of the mission’s rover planners (RPs). “Seeing the features on the rim makes it real now.”
As winter recedes and spring peeks in, the Sun is beginning to rise higher in the Martian sky and the rovers are able to take in more sunlight on their solar arrays. More sunlight means more power and more power means more energy. Opportunity’s power levels jumped by some 80 watt-hours in June, enabling the rover to put the pedal to the medal and increase its driving time and distance. All in all June 2010 has been a good month, said Squyres. “We’re motoring right along.”
 On the rippled road to Endeavour
On the rippled road to EndeavourOpportunity took this image with its panoramic camera (Pancam) on its Sol 2280 (June 23, 2010). Damien Bouic, aka Ant 103, an active member of UnmannedSpaceflight.com processed it in living Martian color. Credit: NASA / JPL-Caltech / Cornell / processed byDamien Bouic
The hope is that Spirit too is feeling the warmth of the Sun and using as much energy as possible to restore her battery power so she can wake up and get back to work. “The expectation,” said Callas, “is that Spirit will begin talking to us sometime in the near future.”
From a major mission discovery to a roving rebound, Spirit and Opportunity have once again proved their worth. “They have continued throughout their extended missions to make magnificent discoveries on Mars that are revolutionizing our understanding of the planet,” Callas noted, “and these substantial discoveries have occurred because we have been able to keep these rovers roving for so long. When people say we don’t make things in this country anymore that work well, all you have to do is point to the rovers.”
Spirit from Gusev Crater
Parked on the west side of Home Plate at Troy, Spirit remained silent throughout the month of June. The team believes the rover tripped a low-power fault sometime in late March as anticipated from the harsher than usual temperatures the Martian winter wrought this year. Once the rover trips a low-power fault, she is programmed to turn off all sub-systems, including communication, and go into a deep sleep.
 Spirt near Troy
Spirt near TroyYou can see Spirit in the upper right quadrant of this image about this time last year by the HiRISE camera onboard the Mars Reconnaissance Orbiter. The rover is at about 2 o'clock, appearing almost as if it's in Mars' spotlight. If you look closely, you'll see its form and head, and even the trail it plowed by dragging its broken right front wheel. For more of Atkinson's MER poetry and illustrated commentary on Opportunity's trek go to: http://roadtoendeavour.wordpress.com
Credit: NASA / JPL-Caltech / UA / enhancement by Stuart Atkinson
Spirit, which has not communicated since Sol 2210 (March 22, 2010), is, ostensibly, using all available sunlight to stay warm and recharge her batteries. Once her two main power batteries recover to a sufficient state of charge, the rover should wake up and begin to communicate direct to Earth over her X-band and through ultra-high frequency (UHF) via the Mars Odyssey orbiter.
Although Spirit is not really expected to wake up and phone home before September, team members and JPL engineers have been listening every day with the radio science receiver (RSR) for any X-band signal from Spirit through the Deep Space Network (DSN). Several times a week, Mars Odyssey has also been listening during previously scheduled UHF relay passes.
Since neither rover has ever tripped a low-power fault before, Spirit is traversing new territory here, and the beyond brutal Martian winter temperatures are a concern. Spirit’s rover electronics module (REM), which encases her brain or computer, has gotten colder than ever before.
It’s possible that a pair of survival heaters have automatically turned on now and again. If that has happened, what little power the rover had stored to replenish her batteries would be usurped by the heaters.
“If the rover’s energy levels are even lower than predicted,” noted Callas, “there is the additional risk that Spirit may trip a mission clock fault.”
A mission clock fault means, in essence, that Spirit will sleep longer, until the batteries have recharged sufficiently and there is enough sunlight on the solar arrays to wake her up. “The analogy, as we’ve talked about before here, is: you expect your alarm clock to wake you up in the morning, but the power goes out in the middle of the night, and so your alarm clock never goes off,” explained Callas. “But you do wake up when the sunlight comes streaming in through the window.”
For Spirit on Mars, it’s not really that simple. “It’s more complicated in that the rover doesn’t lose the clock, but its time reference,” said Callas. That means Spirit wouldn’t know what time it is, but it would be able to monitor time. “The rover in this event sets a timer. When the timer goes off, if there is sufficient sunlight, then the rover wakes up,” Callas explained. “If there is no sunlight -- if the rover wakes up in the middle of the night, for example -- she will go back to sleep and set the timer again.”
 Simulation of Spirit at Troy
Simulation of Spirit at TroyThis artistic image -- in which Astro0 has placed a two-dimensional MER into a scene created by pictures taken by the real rover -- illustrates Spirit's approximate position at the location in Gusev Crater known as Troy. Although the angles are admittedly a little off and the disturbed soil isn't quite right, it offers the general reader a glimpse into the present scene on Mars.
Credit: NASA / JPL-Caltech / ©Astro0 2009
In the event of a mission clock fault, Spirit is programmed to set the alarm and wake up at different times of day until it finds the appropriate daylight hours. “If it has tripped a mission clock fault, Spirit will only wake up when there is sufficient sunlight,” Callas reiterated.
“We can kind of estimate when that will be during daylight hours," he continued. "That will be a small window of time, but we have to wait for the rover to have its alarm clock go off sometime during that time period. If the rover wakes up at night, it will then re-set the alarm for an hour that will shift [forward] by about three hours, so that the time that it tries to wake up will walk through the clock three hours each day,” he said. “It could take a while, but eventually the rover will wake to find the sunlight. It just may not find it right away.”
There is no reason to assume there has been a master clock fault and actually there’s really no way to know whether its’ happened or not. “It’s all speculation right now,” said Squyres. “Our projections suggest it hasn’t happened. If the power went lower than our projections suggest, then it could. We have no way of knowing.”
This team, however, has always prepared itself as best it can for anything that might go wrong and it’s preparing now. “We are currently developing procedures to deal with a potential mission clock fault on the rover,” Callas said. The “reasoning” behind the decision, he said, comes from the engineers’ power analysis based on a new model.
“We have been making changes to our computer modeling, because the model we had since landing had never included the low-power fault since that was an unlikely situation for a 90-day mission, so the tool was never designed to handle that,” Callas explained. “We had to make that change to the tool to provide this kind of information. Now, in recent weeks we have been modeling the rover’s power based on estimates of what we think the conditions are, estimates we get from looking at past winters, at dust accumulation, the many variables that come into play with this new model.”
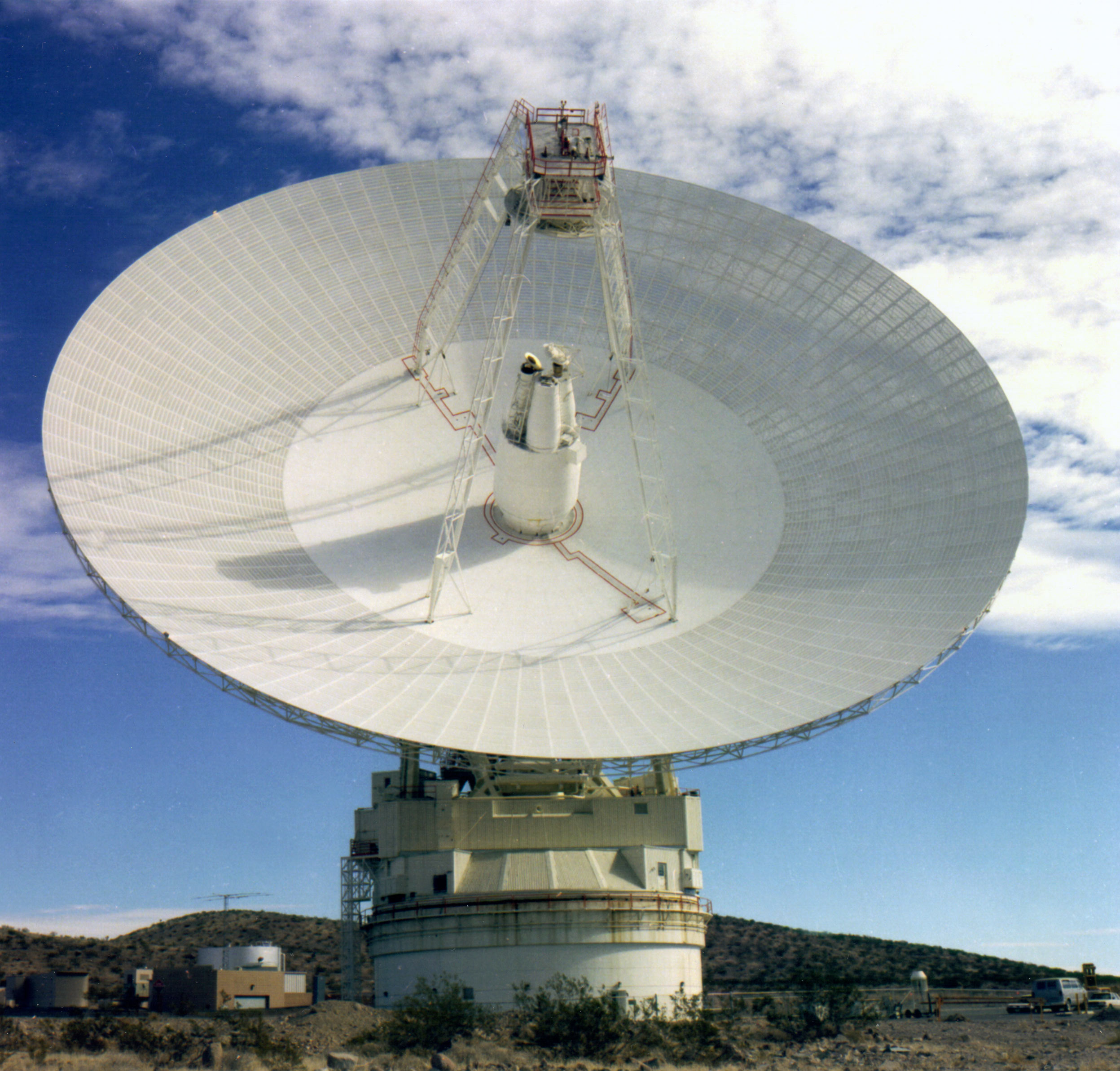 Listening for Spirit
Listening for SpiritFront view of the 70-meter dish at Goldstone, California, part of the global Deep Space Communications Complex. Spirit's transmissions and data are often transmitted through this dish, known as DSS-14. Credit: NASA / JPL
Like all models, this one of Spirit is highly dependent on what the initial conditions are assumed to be, and there’s a lot of uncertainty in addition to a good number of variables.
“At best, a tool can guide you in a direction as to what to expect,” Callas acknowledged. “We see that there is a possibility that the rover could trip the mission clock fault. If we’re lucky, the answer is ‘no.’ If we’re unlucky, the answer could be ‘possibly.’ We cannot say what the likelihood is, only that is it possible and so we should plan accordingly. We’re looking at what we need to do in the event there has been a master clock fault, because it would require that we respond a little differently going forward.”
Most importantly, when Spirit does beep, they want to be listening. “We want to be ready when the rover wakes up, and we want to make sure when the rover wake us, we’re there to talk with her,” Callas said. “I’ve been instructing my team that we should continue to listen everyday, but also be prepared to deal with any conditions, the low-power fault or the mission clock fault, because the rover could be trying to talk with us any day. We need to allow for all reasonable possibilities,” Callas added, “and that’s where we are today.”
With the passing of the southern winter solstice last month, solar energy levels and temperatures should be improving for Spirit as they are for her twin, Opportunity. Still there is no change in terms of the window during which the team expects Spirit is likely to wake up and check in. “Given what we expect the conditions on Mars to be, our model is showing something in the September-October timeframe,” Callas reported.
For a while then, Spirit will continue to sit, mobility and energetically impaired, systems shut down, her odometer unchanged at 7,730.50 meters (4.80 miles). If all good wishes count, the rover is warming to the faint first light of spring and perhaps even feeling a lift from a lMartian wind beneath her “wings.”
“We do recognize that Spirit is at risk and it’s possible that she might not survive the winter,” said Callas. “But we’re not by any means ready to turn the page. It’s a wait-and-see situation, but the expectation is that we’ll get Spirit going again. There is still important and exciting science to do.”
Opportunity from Meridiani Planum
As May turned to June at Meridiani Planum, the skies were typically hazy. Opportunity recorded a tau of 0.465. For the far side of the depths of winter, the rover’s 269 watt-hours of power and slightly improved dust factor of 0.566 gave this robot a respectable amount of energy. But she was at a standstill, sidelined, stopped in her tracks and not going anywhere.
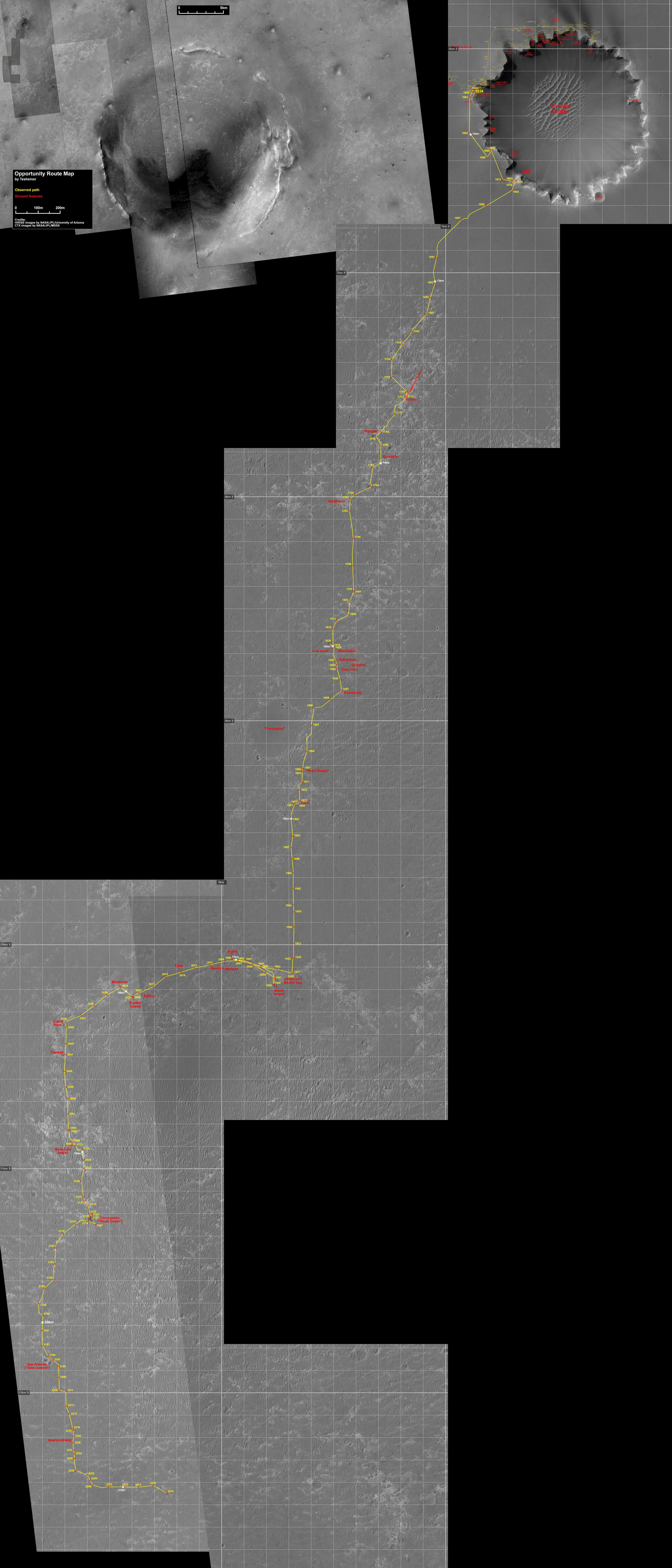 Opportunity route map
Opportunity route mapYou will notice a change in the presentation here of Opportunity's route map. As Eduardo Tesheiner, who creates these, puts it: "Since the start of the east drive, the route plot was quickly reaching the right end of the background map, so it was time to add another 1km x 1km square to the map. This map was already really big and unfortunately it became too big to manage it as a single picture on my PC, so it's time to move on to a new image." See next picture below. Credit: NASA / JPL-Caltech / UA / Eduardo Tesheiner
On Sol 2257 (May 30, 2010), a fault occurred with the Pancam mast assembly (PMA) that supports the science and navigation cameras. The azimuth joint of the PMA -- the actuator or motor that rotates the camera mast -- did not move when commanded. That brought Opportunity to a halt and gave team members a bit of a jolt. Anomalous symptoms had been observed from the Mini-TES earlier on Sol 2250 (May 23, 2010). Now this.
By June 1, the rover’s Sol 2259, the engineers at JPL were conducting a set of diagnostic tests on the PMA azimuth joint, as well as other actuators as controls. “We had what looked like a significant anomaly with the PMA azimuth actuator,” Squyres recalled. “It looked pretty bad. Of all the actuators on the rover, this is the one that has received the most use and is the one I’m most worried about. If it fails, we can no longer turn the mast. We can still in principle cobble together panoramas by turning the entire vehicle, but it would make the vehicle very difficult to operate.”
Thus this PMA anomaly became an instant “cause of great consternation,” Squyres said. “We proceeded, as we always do, to follow the anomaly with a bunch of troubleshooting.” And so the diagnostics began.
On Sols 2261-2262 (June 3-4, 2010), Opportunity ran through the all the commanded drills. In every case, the PMA azimuth actuator did exactly what it was supposed to do. That was the good news. The bad news is that diagnostic test results did not explain fault.
As the first week of the month turned into the second week, the MER engineers were still investigating and on Sol 2265 (June 8, 2010), Opportunity conducted another series of diagnostic tests.
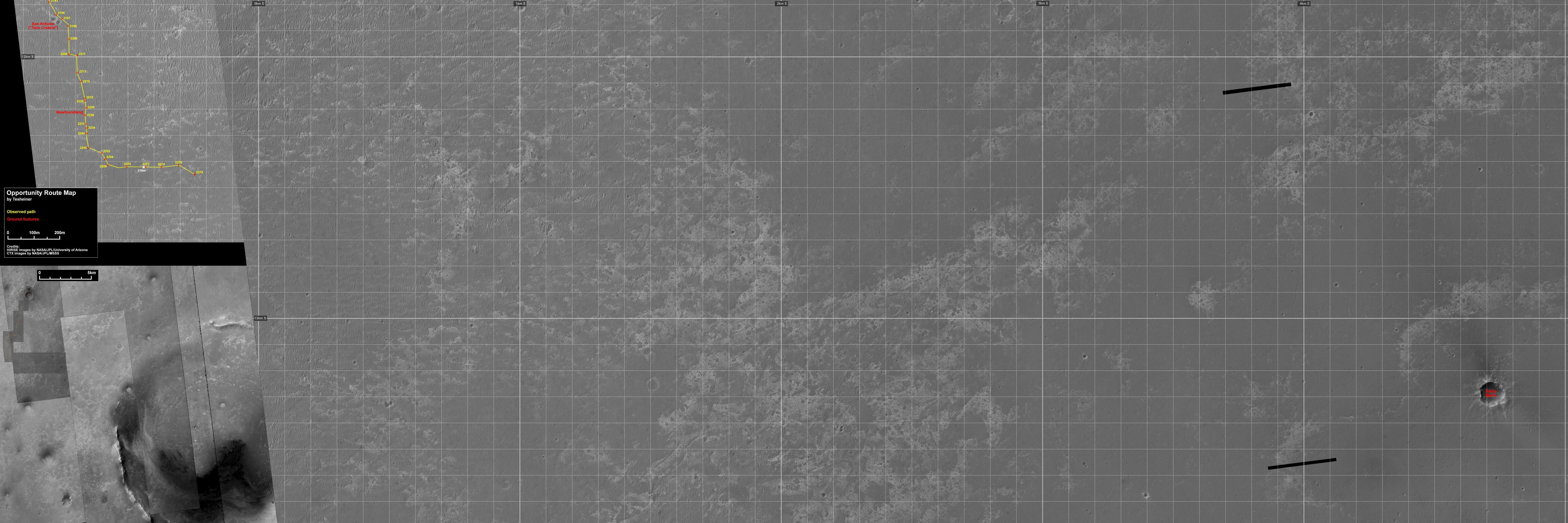 Opportunity route map 2
Opportunity route map 2This new, second picture or add-on to the Opportunity route map this month covers the territory Opportunity will cover on its 'east drive' to Santa Maria. "I thought it would be better to have the whole background until that waypoint right now, instead of adding those 1km squares when needed, because it is important to have the (intermediate) destination on sight," says its creator Eduardo Tesheiner. "It was my initial intention to cover the whole route up to Endeavour but, again, too much for this laptop; that last section will have to be done on a third picture in the future."Credit: NASA / JPL-Caltech / UA / Eduardo Tesheiner
“When we did the diagnostics, we were unable to replicate the problem,” said Squyres. “Everything we tried worked as if it were fine. For a while, we thought we had an intermittent problem.”
By June 10, the troubleshooting engineers had homed in on the miniature thermal emission spectrometer (Mini-TES) as the origin of the PMA symptom. Since the Mini-TES and the PMA are inherently 'bonded,' whenever the Mini-TES completes a task, it signals the PMA that it is finished and the PMA is free to move. The exchange is a kind of electronic “handshake” between the two devices. The PMA, it seems, was waiting on a signal from the Mini-TES that never arrived. Without the ‘handshake,’ it really couldn’t move.
“We were attempting a Mini-TES observation at the time when we did this, and in order to move the mast, the ‘handshake’ that goes back and forth between the PMA and Mini-TES, the communication to the PMA that it’s okay to move was apparently not set properly by Mini-TES,” explained Squyres. “It took a lot of sleuthing through some obscure data products that nobody’s really thought about in years to figure this out, to find out the problem.”
Finding that problem led to another: why wasn’t it set properly?
Following this new lead, the MER engineers, as well as Arizona State University’s Phil Christensen, the instrument’s principal investigator, and Amy Knudson, who has been overseeing all the Mini-TES science on Opportunity, and others involved in the manufacturing of the mineral-detecting spectrometer continued the investigation. “We don’t know what’s going on with Mini-TES and we’ll be working that out in the weeks ahead,” said Squyres. “We do know the instrument is very, very cold. We’re at the coldest part of winter and the instrument is well below its minimum allowable temperatures, which threatens the electronics and could cause temporary or permanent failures. Right now, we’re standing down with any Mini-TES operations at all to try to troubleshoot that instrument.”
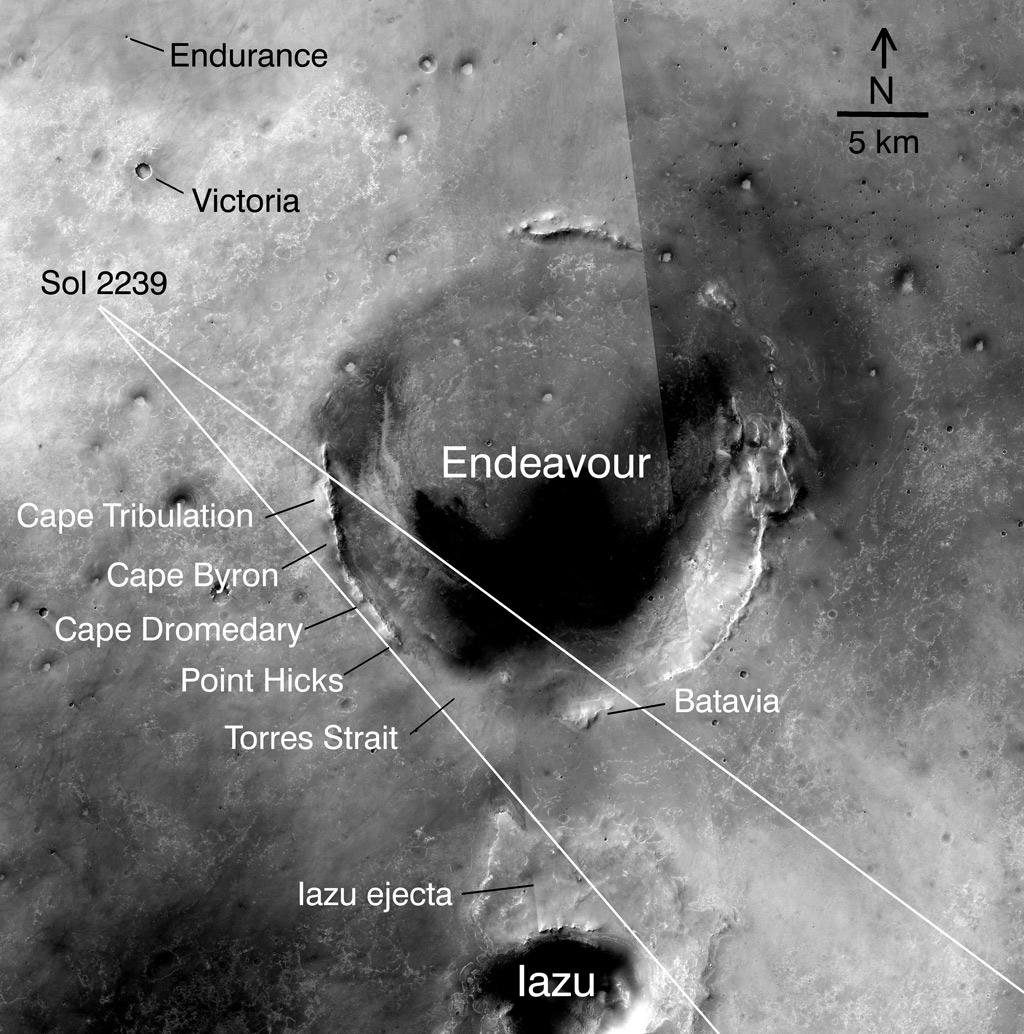 Between craters
Between cratersThis map of the region around Opportunity shows the relative locations of several craters and the rover in May 2010, when the rover took the pictures for a super-resolution view of the horizon to its southeast. The base map here is a mosaic of images from the Context Camera on the Mars Reconnaissance Orbiter (MRO). The scale bar is 5 kilometers (3.1 miles).Credit: NASA / JPL-Caltech / /Malin Space Science Systems / WUSTL
“The Mini-TES is powered off right now,” confirmed Callas. “There’s some suggestion that its problems are temperature dependent,” he added, expounding on what Squyres had said. “Remember, we turned off the Mini-TES heater long ago, and it has gotten colder than it was ever designed to withstand -- but it’s hung in there. We also had anomalous behavior with this instrument years ago when it was really cold, and that problem went away once the instrument got warmer. There was no explanation then for what caused that problem and the issue didn’t fit any failure scenarios the instrument developers could come up with. Now the instrument is cold because of the wintertime, so perhaps we’re seeing a return of this temperature dependent affect on its performance. That’s a hypothesis right now.”
This time, however, the Mini-TES’s symptoms are different and more severe.
“It may be indication that something else is going wrong with the instrument, but as it stands right now we don’t know the explanation and we’re slowly, systematically starting to investigate," Callas said. "The thing we want to make sure of first is that we can safely turn it back on without damaging it further or damaging anything else on the rover. Once we can turn it back on, then we can begin a more pro-active investigation into what’s wrong with it.”
In other words, Squyres summed up: “We will not be using Mini-TES until we’ve thoroughly investigated the problem to the best of our abilities here on Earth.”
Since the Mini-TES mirrors and lenses are still obscured with dust from the global storm of 2007 and the instrument was not really being used anyway, if something else has gone wrong, it won’t be that big of a loss, not like losing the use of the PMA anyway. Nevertheless, the MER team has never gone wrong by erring on the side of caution.
“We have found that it is good to be cautious and we continue to be so,” said Squyres. “The PMA azimuth actuator is the hardest working actuator on the entire vehicle and we worry about that one a lot. When there was an indication there might be something wrong with it, we treated it very seriously.”
 A new view of Endeavour's rim
A new view of Endeavour's rimOpportunity used its Pancam this month to take another view of the near rim of Endeavour. You can actually see a bounty of layering and raised features awaiting the rover on the horizon.
Credit: NASA / JPL-Caltech / Cornell
Meanwhile, Opportunity and crew performed final checkouts to return the PMA to normal use for imaging, and to resume driving. On Sol 2267 (June 10, 2010), Opportunity conducted a ‘quick fine attitude’ to ‘tweak’ her attitude knowledge and to correct for gyro drift, or in other words to get her exact bearings by calibrating her position with the electronics the MER Mission Control accesses, then took some fresh pictures of the road ahead. It was the first time all month, Squyres said, that the rover had taken “some normal panoramas.”
Everything looked good and the rover seemed to be feeling fine, so the team got back to regular operations and Opportunity got back to driving.
On Sol 2270 (June 13, 2010), the rover set out for the first time this month, for the first time since the PMA anomaly and cruised due east for more than 70 meters (230 feet). Two sols later, on Sol 2272 (June 15, 2010), Opportunity put nearly 72 meters (236 feet) of distance behind it, pushing her total odometry to 21,005.47 meters (21.00 kilometers, or 13.05 miles).
Along the way, Opportunity checked off her 13th mile, a half-marathon. “Now we’re going for a full Marathon,” Callas announced. The rover wasted no time continuing the journey, revving up again on Sol 2274 (June 17, 2010) and driving more than 60 meters (197 feet) due east.
Opportunity may have experienced June gloom during the first part of the month, but the second half of the month was as bright as anyone could possibly have expected. By the beginning of the second week of June, Opportunity’s power had risen to around 287 watt-hours, up from the 269 watt-hours with which it started the month. One week later, the middle of the month, Sol 2272 (June 15, 2010), she was producing 297 watt-hours, a good indication winter is at long last receding.
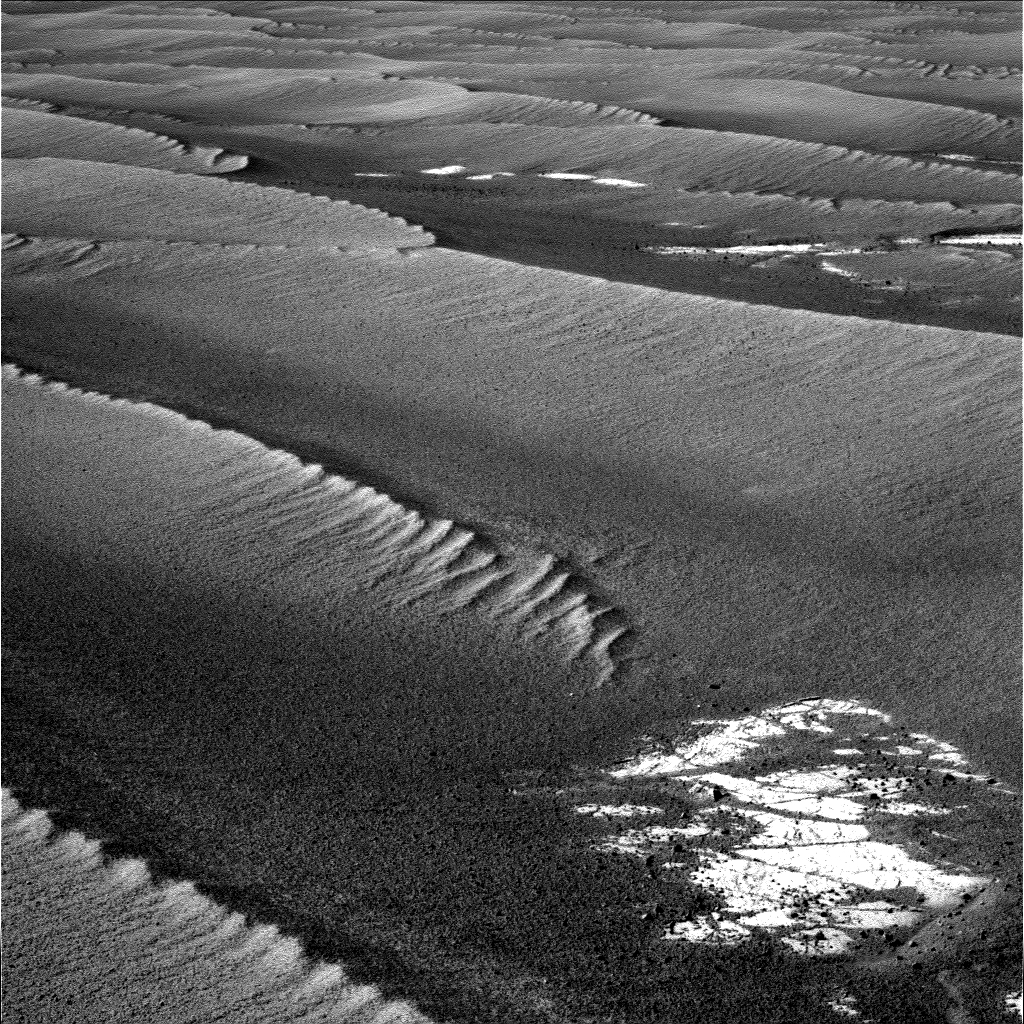
 A classic purgatoid
A classic purgatoidThis photograph shows a classic purgatoid, a large-size ripple that the team nicknamed after Purgatory Dune, the ripple that trapped Opportunity early on in the mission. The rover snapped this picture with its navigation camera (NavCam) during its Sol 2054 (Nov. 3, 2009), as it was bypassing a dangerous field of purgatoids. "Notice the sigmoidal or 'S' shape," says Paolo Bellutta, a MER rover planner. "We avoid these like the plague."Credit: NASA / JPL-Caltech
Since Opportunity left Victoria Crater in September 2008, Opportunity has been crossing, avoiding, or passing by all kinds of ripples, some to be crossed some avoided at all costs. In recent weeks, the RPs have added new analyses and ground truth intelligence to refine their ‘best practices’ for roving the ripples ahead, Paolo Bellutta said during an interview yesterday.
They rover planners instituted a ripple driving code after Opportunity was “merrily driving along to Victoria Crater” and got stuck in -- and then got out of --Purgatory Dune, an the 18-inch-tall ripple, for six weeks in 2005, Bellutta said.
As mentioned here in many previous Updates, Opportunity is taking a circuitous route to Endeavour because of a field of threatening sigmoidal or ‘S’-shaped ripples, dubbed purgatorids, not so affectionately by team members, after Purgatory Dune. “We avoid those like the plague,” said Bellutta.
Opportunity has put “the worst of the terrain” behind it, Bellutta said, but the rover is still negotiating the mesmerizing rippled landscape that is the gateway to Endeavour. While not all ripples are sigmoidal or ‘S’-like in shape, all ripples require care and negotiation. “The rover is driving now on terrain that is full of ripples, created and shaped by wind and influenced by the bedrock beneath,” said Bellutta.
Interestingly, Opportunity seems to have encountered a different kind of ripple this month, smaller, wider, gnarlier ripples. Bellutta explained: “Typically the slopes on these ripples [Opportunity has been crossing] are about 12-15 degrees, and now they are more on the 8-10 degrees. On the HiRISE images, these ripples appear large and brighter. But we cannot detect ripple elevation very well from the HiRISE images and so we have been estimating ripple size by how far apart the ripples are. If we see ripples that are far apart, we try to avoid them.”
No matter the size, the ripples Opportunity has been encountering all seem to share one thing in common. “These ripples are not symmetric,” Belutta pointed out. “They have a good side and a bad side.”
 Ripples and more ripples
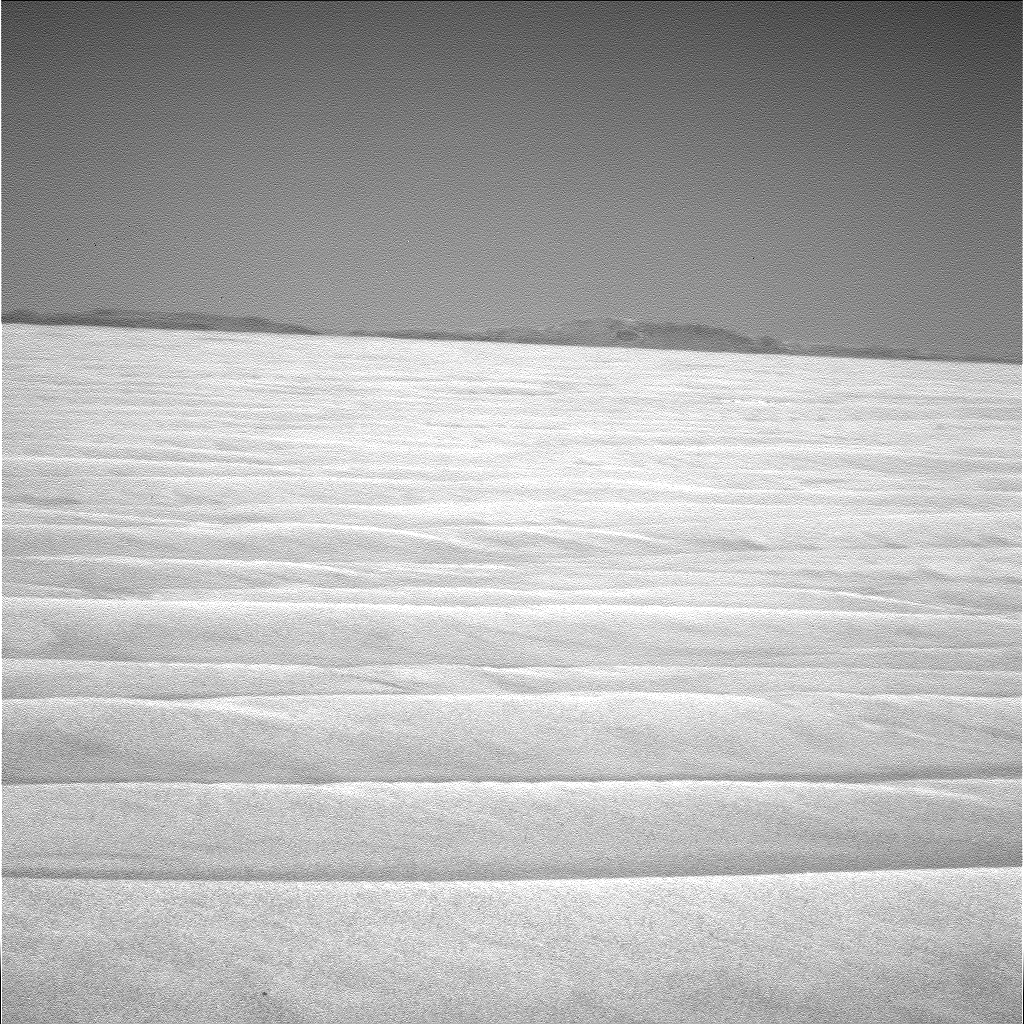
Ripples and more ripplesThis picture, which Opportunity took with its panoramic camera (Pancam) on its Sol 2281 (June 24, 2010), is one of the smaller ripples that the rover has been crossing this month.
Credit: NASA / JPL-Caltech / Cornell
Since roving into the area, Opportunity has discovered that the current wave of ripples are really not that big, but the western side or ‘bad’ side of the ripple is wider. Another difference can be seen on the ripple crests, which are not straight but jagged or saw-toothed, “corrugated” in appearance, as Belutta described it. “The geologists have told us that it means the wind is blowing north-south or south-north and is depositing supplemental material on top of these ripples.” The jagged crests, which are believed to be caused by crosswinds, complicate the crossings. “This poses another sort of a threat to the rover,” Bellutta noted. “Lucky for us, they are localized, and we try to avoid them whenever we can.” Otherwise, it’s up and over, very carefully.
“Typically when we cross ripples, we have at least two, three wheels on good soil, with the other three, four climbing onto the ripple,” Bellutta expounded. “It can happen that we have all six wheels on less consolidated materials and this makes it harder for the vehicle to cross over. So we have to be careful about where we cross the ripples.”
The ‘bad sides’ of the ripples Opportunity is crossing are west facing. That means the rover needs to rove over the bad side first, going uphill. “We try to attack them as much as possible dead-on,” said Bellutta. “We try to find the lowest point on the ripple and drive straight into them. We try to hit them between 60 to 90 degrees relative to the ripple crest.”
They derived that angle of attack from experience, analysis, and computer modeling. “We analyzed the data and the images at JPL,” said Bellutta. “Also, Ray Arvidson’s group modeled the way the rover interacts with the soil and did some analysis on this type of terrain. They tried to [with the computer model] visually cross this terrain at different angles, and that’s where we got the number between 60 and 90 degrees.”
In another “kilometer or two,” Opportunity should be out of the rippled forest and onto smoother plains. “We need to keep an eye out always, but it should be much easier driving after that,” Bellutta said.
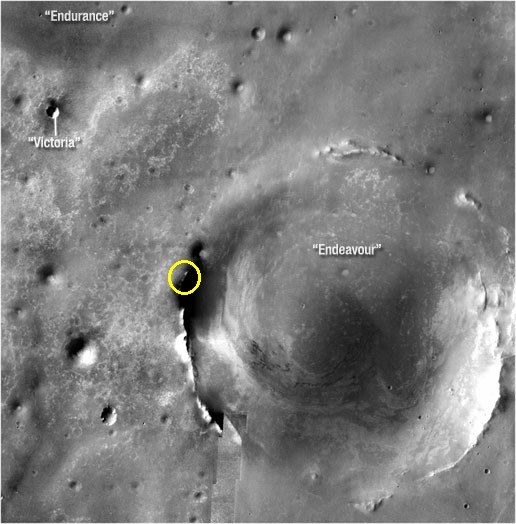 The goal
The goalThis HiRISE image taken from orbit by the camera onboard MRO was labeled by Stuart Atkinson to show the general area on Endeavour's rim where the MER team decided last motn to direct Opportunity for arrival. From where the rover currently is, this is "the closest place on the rim," said Steve Squyres. "We're not wasting any time."Credit: NASA / JPL-Caltech / UA/ labeled by Stuart Atkinson
For now, Opportunity has to remain ever vigilant. “We’re driving through terrain now that is like some of the stuff we encountered south of Endurance but before the drifts started to get big,” described Squyres. “As we get further, the ripples will get smaller and smaller. Other than that though it’s pretty basic driving. The rim of Endeavour is on the horizon and we’re just driving.”
Seeing the hills on the rim of Endeavour seems to have done wonders for the team’s esprit de corps, not that this group of engineers and scientists has ever needed any encouragement on that front. In fact, the MER team sets a new standard in mission camaraderie. But seeing Endeavour and getting past the winter solstice, which is allowing Opportunity to now take longer drives, has virtually re-charged the ‘batteries’ of the rover drivers, Bellutta said.
Opportunity hit the Meridiani highway again on Sol 2276 (June 19, 2010). After making a small J-turn to avoid a ripple, the rover headed 72 meters (236 feet) to the east. On Sol 2279 (June 22, 2010), the rover drove slightly to the east/southeast and put more than 70 meters (230 feet) behind her.
Since then, it’s been more of the same. “Drive, drive, drive,” said Squyres. “We’re just driving and heading east to Endeavour, simple as can be.”
On Sol 2281 (June 24, 2010), Opportunity completed another 70 meters (230 feet), again driving east/southeast. Two sols after that, on Sol 2283 (June 26, 2010), however, the rover headed 57 meters (187 feet) to the northeast to avoid some large ripples. But on Sol 2286 (June 29, 2010), the rover was back on course ripping for another 70 meters (230 feet) to the east.
As Opportunity drove on, the skies cleared little by little to a condition we might call barely hazy. When the rover stopped to check her vitals at the end of the month, she recorded a tau or atmospheric opacity of 0.295, and was brimming with 354 watt-hours of power.
 Endeavour landfall and sites
Endeavour landfall and sitesFeatures at Endeavour are being named after places and people involved in the story of Captain Cook's voyage to and discovery of Australia. Those that have been named are labeled here on this Google Mars oblique view of Endeavour by Stuart Atkinson. The place where Opportunity is to make "landfall" has just been named Cape York.Credit: NASA / JPL-Caltech / Cornell / UA / labeled by Stuart Atkinson
All told, Opportunity drove 546.2 meters (.55 kilometers/ .34 miles) this month and is slated to drive again today. Tomorrow, the rover will be commanded with a set of science-light tasks to carry out over the four-day July 4th weekend, while her crew on Earth takes a summer break.
Every drive this month and for the foreseeable future, Bellutta said, has been and will be backward. It’s the technique that seems to be keeping the wheel current to the sometimes-troublesome right front wheel from getting too elevated.
“As long as we continue to drive backwards and stay within 70 meters, it seems to keep the right front wheel [issue] at bay,” he said.
It doesn’t make any difference to Opportunity whether it drives forward or backward really. But the one thing it can’t really do well driving backward is use its AutoNav feature, which is the software that it needs to drive by itself safely. In the next month or so, however, that will change, Bellutta said.
“Driving backwards is really difficult with AutoNav, because we cannot use the rear HazCams to AutoNav since the terrain doesn’t have enough features to provide a terrain map for AutoNav; therefore, we cannot do hazard avoidance with the HazCams and we have to use the NavCams. And when you point the NavCams backwards, you have that antenna in the field of view and that makes it difficult to get a really good terrain map. But we have a trick in the works that will allow us to do AutoNav driving backwards using the NavCams.”
Just when you’d think the MER bag of tricks might be getting empty, Opportunity soon will be able to drive autonomously backwards. No matter who you are, you have to admit that’s pretty darn cool.
MER team members are taking advantage of the quiet time granted with Spirit’s hibernation and Opportunity’s cooperation to catch up on things and take much-deserved vacations, Callas said. But the view of the hills on the rim of Endeavour is now an ever-present reminder of what’s coming.
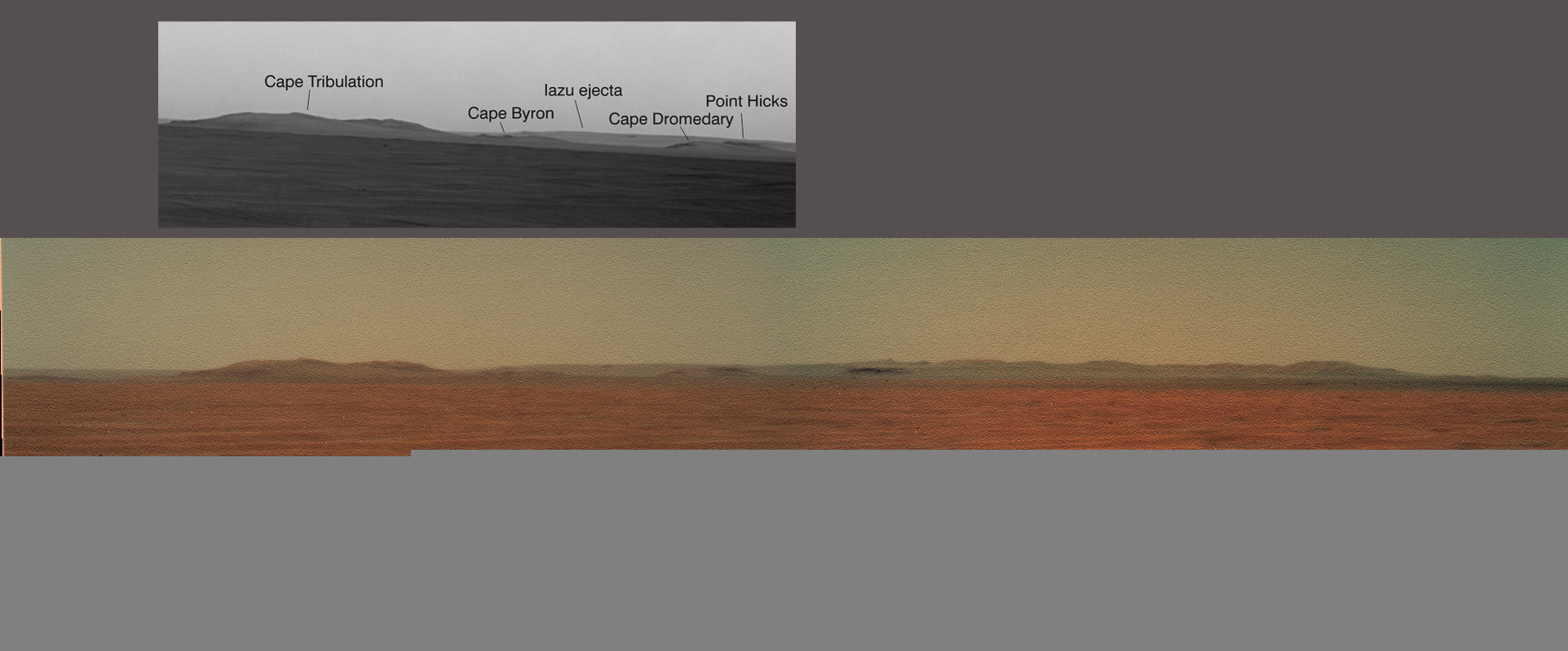 Points of newly named interest
Points of newly named interestThis image shows a comparison of the super resolution image that Opportunity took with its Pancam of the hills of Endeavour and a similar picture processed and colorized by Damien Bouic, aka Ant103 of UnmannedSpaceflight.com It was juxtaposed by Stuart Atkinson, a frequent image contributor to the MER Update.Credit: NASA / JPL-Caltech / Cornell / colorized by Damien Bouic
“We get these tantalizing glimpses of stuff out on the horizon,” said Squyres. “Endeavour is there and we’re seeing more and more of it every day."
The team has begun naming various points of interest at Endeavour, each after a place or person associated with Captain Cook's journey in his Endeavour. The place where Opportunity is slated to make 'landfall,' has just been christened Cape York, said Squyres. "We can't see it in the Pancam images yet," he noted.
At the rate Opportunity is cruising now, it shouldn't be long. "The terrain is getting easier and easier the farther east we get, the rover is hanging together and the wheel currents are looking good. But, we still have a long way to go, more than 10 kilometers,” Squyres reminded. “The worst thing you can do in this game,” he added, “is to start getting complacent when it looks like things are going your way.”
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate