
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


The Mars Exploration Rovers Update: Spirit Presses On, Opportunity Roves On as Martian Winter Sets In

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
May 31, 2008
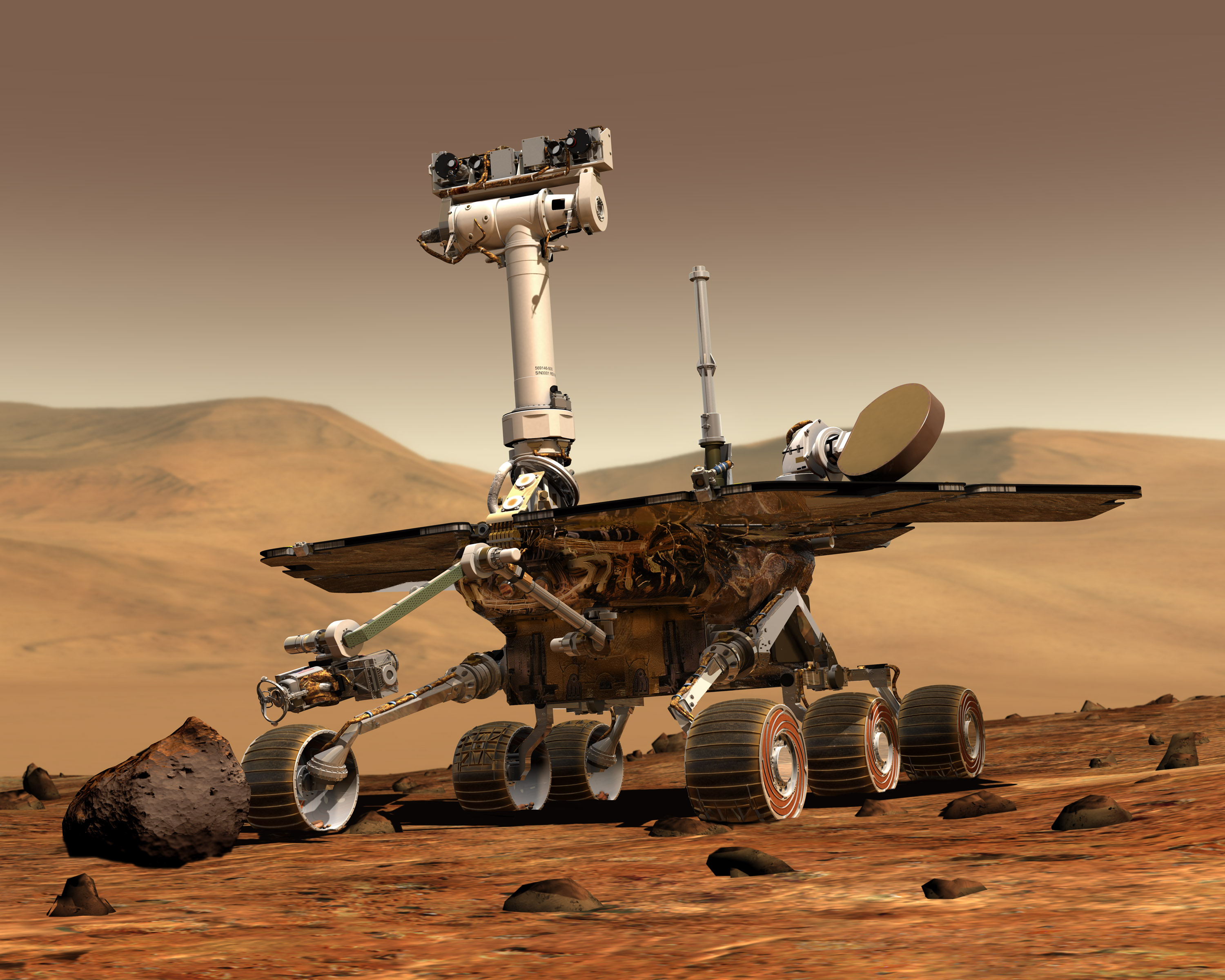 Mars Exploration Rover
Mars Exploration RoverCredit: NASA / JPL / D. Maas
As Phoenix commanded the headlines with its flawless touchdown in the arctic region of the Red Planet this past month, the Mars Exploration Rovers (MERs) forged onward slowly, quietly and out of the spotlight, heading into the depths of their third Martian winter. Spirit persevered and held its own in terms of energy, while Opportunity, after six weeks of being stopped in its tracks with a shoulder joint injury, roved once more.
"Spirit is hanging in there," reported Jake Matijevic, chief of rover engineering, of the Jet Propulsion Laboratory (JPL), where the rovers were designed and built. Winter is brutal in Gusev Crater and Spirit took on a lot of dust from the dust storm last June and July that hasn't yet been whisked away by the Martian winds. Just a few months ago, the team was planning on having to put Spirit in a special ultra-low power mode to help it survive the season. But true to the MER nature, this rover has risen once again to the challenges wrought by winter on this beautifully desolate planet.
From its perch off the northern edge of Home Plate, the circular volcanic formation it's been studying for months now, Spirit continued taking pictures for the next big winter panorama, named in honor of the beloved science artist Chesley Bonestell, in addition to keeping an eye on the dust. Although its power levels dropped as expected this past month, the rover continues to produce more power than originally anticipated just a few months ago. The objective for June remains the same: "Survival," said Steve Squyres, the principal investigator for rover science, of Cornell University. "Stay alive, that's it."
On the other side of the planet, at Meridiani Planum, Opportunity spent the first half of May the way it spent the last half of April -- inside Victoria Crater, stopped in its tracks on the way to the base of Cape Verde as its ground crew diagnosed its shoulder "injury." This rover's shoulder joint, aka Joint 1, froze in mid-April while it was conducting a routine unstow of its arm or instrument deployment device (IDD), putting its arm out of commission.
After a lot of troubleshooting with the test rover in the Mars Yard at JPL and a good warm-up with a regimen of electrical stimulation and heat, Opportunity finally moved its shoulder joint and opened its robotic arm, positioning it to the front, an undeniable feat after surviving four Earth years, two Martian winters, a major dust storm, and more than 1,500 day-to-night temperature cycles on the Red Planet.
"We're delighted," said Squyres. "It was looking kind of grim with that arm for a while and I wasn't convinced we were ever going to move it again." That noted, he quickly added: "We do not ever intend to stow that arm again."
 Three unstows and "uh-oh" for Opportunity
Three unstows and "uh-oh" for OpportunityFor more than two years, Opportunity would unstow its arm at the end of each day of driving, as part of a "workaround" procedure devised after the rover's shoulder joint, aka Joint 1, began stalling in November 2005. On Sol 1502 (April 15, 2008), Opportunity's arm barely budged during the routine unstow and the team began troubleshooting immediately. Finally after six weeks of being ordered to stay put, Opportunity was able to position its arm out front and has now been given the green light to rove on.
Credit: NASA / JPL / montage by E. Lakdawalla
So, for the rest of its life, Opportunity will have no choice but to drive with its arm unstowed, out front. "As long as we have all five joints working, we have good capability of the arm to normally do what we do, and if and when we do lose that shoulder azimuth joint, we'll still have a four-degree-of-freedom arm that is perfectly poised out in front of the vehicle for doing science," Squyres elaborated. “I am feeling way, way, way better about the arm now than I was a few weeks ago."
The MER team spent the rest of May conducting trials with the test vehicles at JPL to determine the best position and placement for the arm during drives, while Opportunity worked on and completed its next panorama, named after renowned geochemist Robert Minard Garrels, and conducted atmospheric research.
“All the focus has really been on resolving the issue with the instrument deployment device (IDD) and most of that work was done on the ground,” Squyres said.
By month’s end, that groundwork was done and today, Sol 1547, for the first time in six weeks, Opportunity was to rove on. “We were borderline stuck when the IDD problem hit and we’ll be trying to extricate ourselves from the mess we’re in,” Squyres said. That “mess” is a nasty little sand patch from which the rover was commanded to drive out of, “straight backwards,” one or two meters.
Once the rover achieves some distance from the patch and is back on solid bedrock round and as the calendar turns to June, the MER team will decide the best way for Opportunity to rove to the base of Cape Verde.
It might have been a relatively slow month, but it wasn't as slow as it might have been and all's well that ends well. Perhaps even robot field geologists need to “downshift” sometimes and there's no time like winter on the Red Planet to do it.
 Jake Matijevic
Jake MatijevicJake Matijevic is chief of rover engineering at the Jet Propulsion Laboratory (JPL), the NASA center where Spirit and Opportunity were designed and built, and from which they are being commanded. Credit: NASA / JPL-Caltech
Winter Solstice occurs in the southern hemisphere of Mars on June 26, so the Sun will be on the upswing just one month from now. As it begins to rise higher in the sky, the rovers’ energy levels will pick up.
For now, Squyres said, "the rovers remain in good health and the team remains busy."
In fact, the team's paper on Spirit's discovery of near-pure silica around Home Plate hit the pages of Science just a week ago. Titled "Detection of Silica-Rich Deposits on Mars," the journal report cites evidence for the silica found, both in soils and in bedrock, forming under hydrothermal conditions as "strong indicators of a former aqueous environment," or in other words, past water. Since hydrothermal environments on Earth are known to support thriving microbial ecosystems, Squyres and his co-authors conclude this discovery is "important for understanding past habitability of Mars.”
Spirit from Gusev Crater
Although Spirit is faring very well in its bid to survive its third Martian winter, the rover’s ability to produce power is still a matter of concern for the MER engineers at JPL. From its average of 235 watt-hours in April, however, Spirit produced on average 225 watt-hours during May. "It's dropping much more slowly than first anticipated and it's pretty stable," Matijevic said.
 Spirit explores Home Plate
Spirit explores Home PlateMore than a year of Spirit's examination of the volcanic feature in Gusev Crater known as Home Plate is chronicled in this animation of nine images from the HiRISE camera on Mars Reconnaissance Orbiter (MRO). The images cover an area approximately 100 meters square. The geometry of Home Plate appears to shift from image to image because the orbiter often had to turn to one side or the other of its orbital track across Mars in order to view Spirit, so usually saw the raised topography of Home Plate from a point that was not directly over Spirit's head. However, some of the apparent shifts in features are also real shifts in the distribution of dust around Home Plate with shifting winds and seasons. The dust storm of summer 2007 almost completely blocks the view of Spirit at one point during the animation.Credit: NASA / JPL / UA / D. Ellison
Since the cold winter temperatures on Mars could easily trigger the survival heaters on the rover electronics module (REM), engineers took the extra precaution of disabling those particular heaters toward the end of last month, on Sol 1533 (April 25, 2008), to conserve power. Now they must monitor temperatures carefully to make sure the REM doesn't get too cold.
"By disabling those heaters what we've done is avoid a potential problem in which we would inadvertently trip the sensors during three-sol plans, usually uplinked for the weekend, where we couldn't exactly predict the temperatures of the REM," explained Matijevic. "Even with a comparatively light day of operation now, we're not in danger of having a surprise of the REM heaters suddenly turning on and draining a certain amount of energy from the batteries,” he assured.
The survival heater for the Mini-TES, however, has not been disabled. That, actually, had been Squyres' "biggest concern." The heater is in there, of course, for a reason, to keep the instrument above its “flight-allowable” temperature. The Mini-TES, which sits at the bottom of the Pancam Mast Assembly, is a sensitive instrument that can "read" the composition of rocks and soil from a distance and was designed to survive to temperatures of -40 degrees. "If we disable that heater in order to save power, then we put the instrument at risk and maybe we'll lose it," Squyres said.
Opportunity's Mini-TES operated for years without having its heater to protect it, because when the MER team realized that the heater for the robotic arm's shoulder joint, which was stuck in the "on" position, their "workaround" was to put the rover into a DeepSleep mode wherein it shut all its system down at night, kind of like when C3PO shuts down for the night in a scene in the original Star Wars movie. But comparing Gusev Crater to Meridiani Planum is kind of like comparing New Hampshire with California in the winter. "It's really cold at Gusev in winter," reminded Squyres. "It's a different story and a different instrument. They are two pieces of hardware. I cannot tell you that we haven't been lucky with the Mini-TES on Opportunity. I do not to want to take that risk with Spirit’s Mini-TES."
"We've been very, very lucky this winter with the tau at Gusev," Squyres continued. Despite the thick coat of dust on Spirit’s solar arrays, the atmosphere has been exceptionally clear. “Because of that, the power projections have been a bit higher than we anticipated. If our luck holds, we’ll be able to make it through the winter without having to disable the Mini-TES heater."
 Hunkered down at Home
Hunkered down at HomeSpirit snapped this picture with its front hazard camera on Sol 1506 (Mar. 28, 2008). The rover is in the midst of a winter science campaign and will stay in this position until spring arrives in the southern hemisphere of Mars in late August, early September.Credit: NASA / JPL - Caltech
The Mini-TES heater, though, pulls a considerable amount of power, on average of 40 to 50 watt-hours and that means the MER team had to make sacrifices. "We decided we were willing to give up some science in order to preserve Mini-TES, because we want the instrument intact come springtime when we start hitting the south and looking for more silica and that sort of thing," Squyres offered.
"I have high hopes we'll be able to continue to keep that heater on through the remainder of the winter. Now, if the tau suddenly went up, that could change things dramatically. But we've been successful so far. Thus is very much limiting the science that we can do, but the rover is in good health and is not at risk right now from a power perspective," he added.
Despite the chunk of Spirit’s power that the Mini-TES is drawing, “we're still tolerating the 40 to 50 watt-hours it takes within the plans we're able to exercise, so the Mini-TES heater is not crippling energy drain, added Matijevic. But if it ever came down to the health of the rover being at risk, Squyres said: “I would pull the plug to insure the safety of Spirit.”
Intriguingly, the MER team has had "a few issues" with its power model. "We had some difficulty predicting the energy going to survival heaters for the Mini-TES and for our batteries," Matijevic said. "They seem to be predicting more energy for survival heating than we were actually seeing being used. When the energy level is in the 270 to 300 watt-hour range, these errors don't real seem to matter much, but when we're down in the 230 range it takes a certain toll,” he expounded.
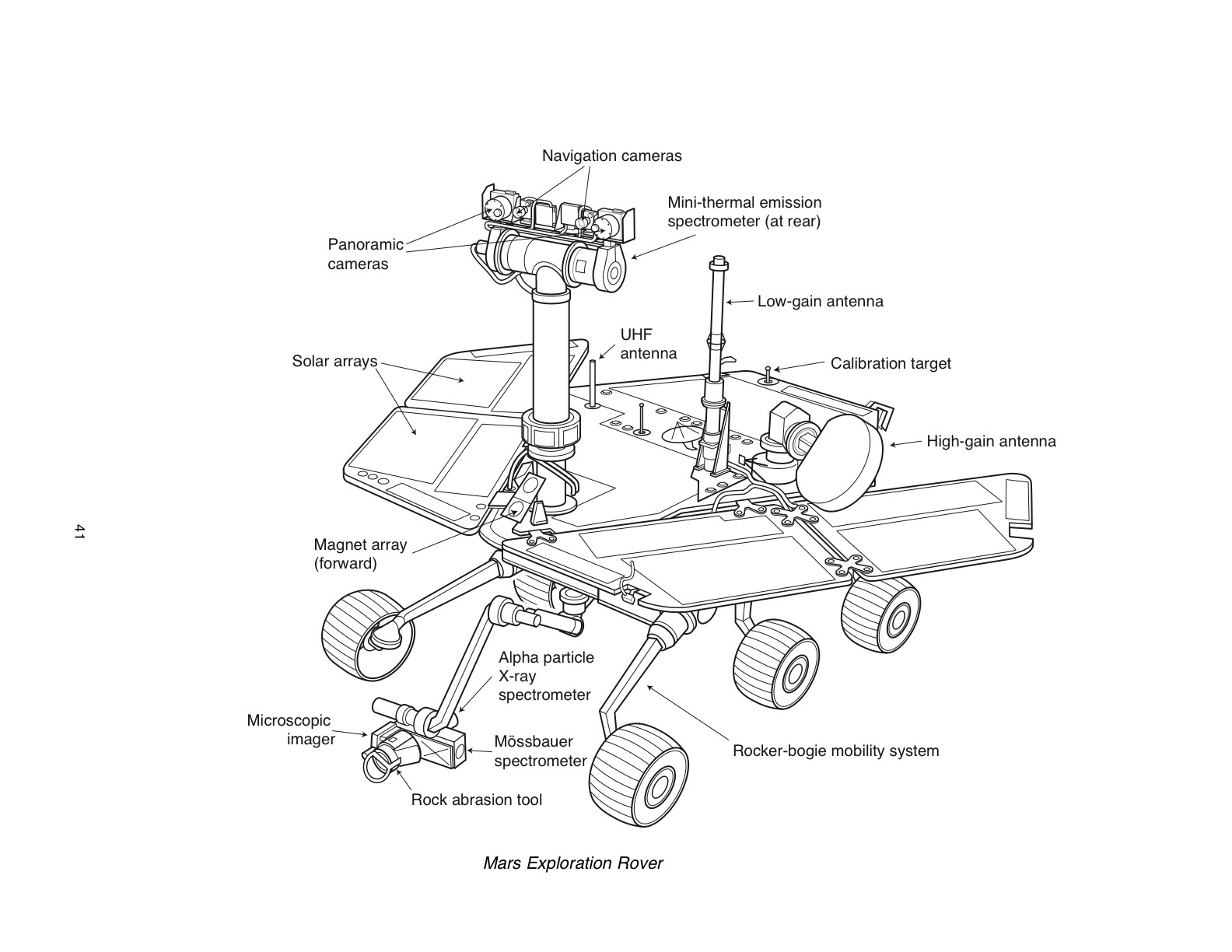 MER
MERThis diagram shows the basic layout of the Mars Exploration Rover design
Credit: NASA /JPL-Caltech / Cornell
As for the rover electronics module, besides the survival heaters, the other way of keeping the module warm enough during the night is to generate more heat during the day by keeping the rover awake longer. Of late, 39 minutes is the shortest possible awake time for conducting minimal activities. Another 20-plus minutes of awake time is needed on days when the rover transmits data to Odyssey during its overhead pass for downlinking to Earth. On other sols, rover handlers sometimes arbitrarily increase Spirit's awake time to 50 minutes or longer to generate enough heat to protect the REM, even if science activities don't require the rover to be awake that long.
The challenge for Spirit's engineers during each planning cycle these sols is to recharge the battery enough to do its scientific research, then recharge the battery again to transmit data to Odyssey. "The rover is still pretty much on a day-on / day-off to recharge schedule," said Matijevic, with downlinks of data occurring about every four sols.
Spirit is caught in a "Catch-22" set of tradeoffs among power, heat, communications, and science. By keeping the solar-powered rover awake for shorter periods, the engineers have the rover conserve energy, but it then generates less thermal inertia or heat for keeping the REM warm. The more consecutive sols that go by without transmitting temperature and power updates to Odyssey and to Earth, the more Spirit's handlers must rely on margin or "wiggle room" from earlier predictions and keep the rover awake longer to protect the electronics module. Maintaining this delicate balance will become increasingly more of a challenge as the rover moves closer to the Winter Solstice, when even colder temperatures and less sunlight “fuel” coming into the solar arrays could turn the situation into a precarious scenario.
 Volcanic Home Plate
Volcanic Home PlateSpirit took this false color image of an edge of Home Plate with its Pancam. It shows some of the evidence on which the science team is basing its hypothesis that the circular plateau was created from volcanic activity. The lower coarse-grained unit shows granular textures toward the bottom of the image and massive textures. A feature interpreted to be a "bomb sag," which is 4 centimeters across, is pointed out.
Credit: NASA / JPL-Caltech / USGS / Cornell
As April gave way to May, Spirit was still at work shooting Pancam pictures for the BonestellPanorama, just as it was one month ago. This mural-like picture will show the rover's 360-degree view from the north rim of Home Plate. To get that view, the rover must take 27 columns of images with its panoramic camera (Pancam), from foreground to sky. All told, it will take some 2,000 pictures, each "at low compression levels” and with all the camera’s filters, according to Jim Bell, the Pancam's lead scientist, to make for "a high-quality dataset, analogous to the McMurdo pan" that Spirit took during the last Martian winter it survived.
Most of the rover's science time in May, actually, was devoted to the Bonestell Pan. "We're working on it a little at the time,” confirmed Matijevic. “We're a little more than half way done, so we've got a ways to go. But we're only able to spend a short time taking images now, so we take a few pictures every week. We'll slowly work our way through that. We have all winter to do it and beyond really, because it will be a while yet before Spirit is in a position to do anything else.”
Besides the Bonestell Pan, Spirit is of course continuing to monitor dust in the atmosphere and on its deck. It also managed to squeeze in some research with the Mössbauer spectrometer, looking for any iron-bearing minerals in a soil exposure target named for Arthur C. Harmon, a former Tuskegee airman.
 Looking northward
Looking northwardSpirit took this image with its Pancam on Sol 1448 (Jan. 29, 2008) after inching backward into position just off the edge of the northern edge of Home Plate. This is the view it has enjoyed since and will enjoy at least until our fall 2008, when spring "blooms" in the southern hemisphere of Mars. Husband Hill is on the horizon. The dark area in the middle distance is the El Dorado sand dune field. This picture combines separate images taken through the Pancam filters and is presented in a false-color stretch to bring out subtle color differences in the scene.
Credit: NASA /JPL-Caltech / Cornell
There was one "curious event" that occurred this past month, which the team had not anticipated -- "the loss of an uplink a week ago," said Matijevic. It occurred when the Moon passed in the field of view of the Madrid Deep Space Network (DSN) ground station at the time the MER team was trying to uplink its commands to the rover. "We hadn't really had this experience in the past and we hadn't been looking for it. It was just an unfortunate circumstance where things added up kind of oddly," he said.
"The thing is," Matijevic reflected, "when you last long enough, even the most low-probability events eventually take place."
As for science, Spirit hasn't been finding any new or particularly distinctive discoveries. "I'm not expecting big discoveries to leap out at us from this big patch of rock and soil that we happen to have in front of us in the winter," Squyres said. "We didn't choose this place for science purposes. We chose it for the slope it offers us. We will be dutiful scientists and make measurements where we can. But our primary objectives right now are environmental monitoring and keeping the vehicle safe and ready for spring."
Opportunity from Meridiani Planum
On the inner slope of Victoria Crater not far from its entry Point at Duck Bay, Opportunity greeted May in the same place it bid adieu to April, stuck in its tracks on its way to the base of Cape Verde awaiting diagnosis of its shoulder azimuth joint, which controls side-to-side motion of the robotic arm. The rover had just initiated a routine unstow maneuver in mid-April when that joint, known as Joint 1, froze. Like an injured athlete, Opportunity, which was sporting fairly robust power levels bouncing between 360 and 370 watt-hours, was sidelined, ordered to stay put, and conduct remote sensing and atmospheric research in place.
 Testing Opportunity's robotic arm
Testing Opportunity's robotic armDuring Sols 1531-1532 (May 14-15, 2008), Opportunity's controllers successfully deployed its stuck robotic arm.
Credit: NASA / JPL / animation by E. Lakdawalla
Nevertheless, May literally blew in for Opportunity as Mars sent a series of santana gusts to dust-off its solar arrays. With an increase in the amount of sunlight fuel it could access, the robot field geologist's energy levels rose to an average that hovered around 420 watt-hours.
"We have had these kinds of winds in the past around this time of year at Meridiani, the first one was when we were in Endurance Crater, another one occurred when we were on the flat plains area on the way to Victoria Crater, and now this is another one,” Matijevic pointed out.
"While we were in Endurance, Mars basically cleaned the arrays back to where we had, roughly, a new array condition, not unlike or at least comparable to the deposition of what we landed with,” he said. “It's not exactly known what the seasonal atmospheric conditions are at Mars, but we are seeing some repeatability from one year to the next. It may be that the winds pick up late fall, early winter timeframe in Meridiani Planum.” Of course, that's one reason the rovers are on Mars, to be able to observe these conditions.
Down on Earth, the MER engineers at JPL spent most of their energies conducting tests with the test rover on the ground to figure out if Opportunity had lost the use of its arm for good. Since they had been able to activate the arm by applying higher than normal current for more than two years, they began with electrical resistance tests at the warmest and coldest times of day to determine if this persistent stall in Joint 1 was dependent on temperature. "We've seen stalls in this joint many times before," Squyres said, "but this time it was different."
Opportunity, meanwhile, continued to receive its morning instructions directly from Earth via its high-gain antenna, and relayed data back to Earth daily via the UHF antenna on Odyssey. As per its commands, the rover focused on remote sensing of nearby targets and atmospheric research.
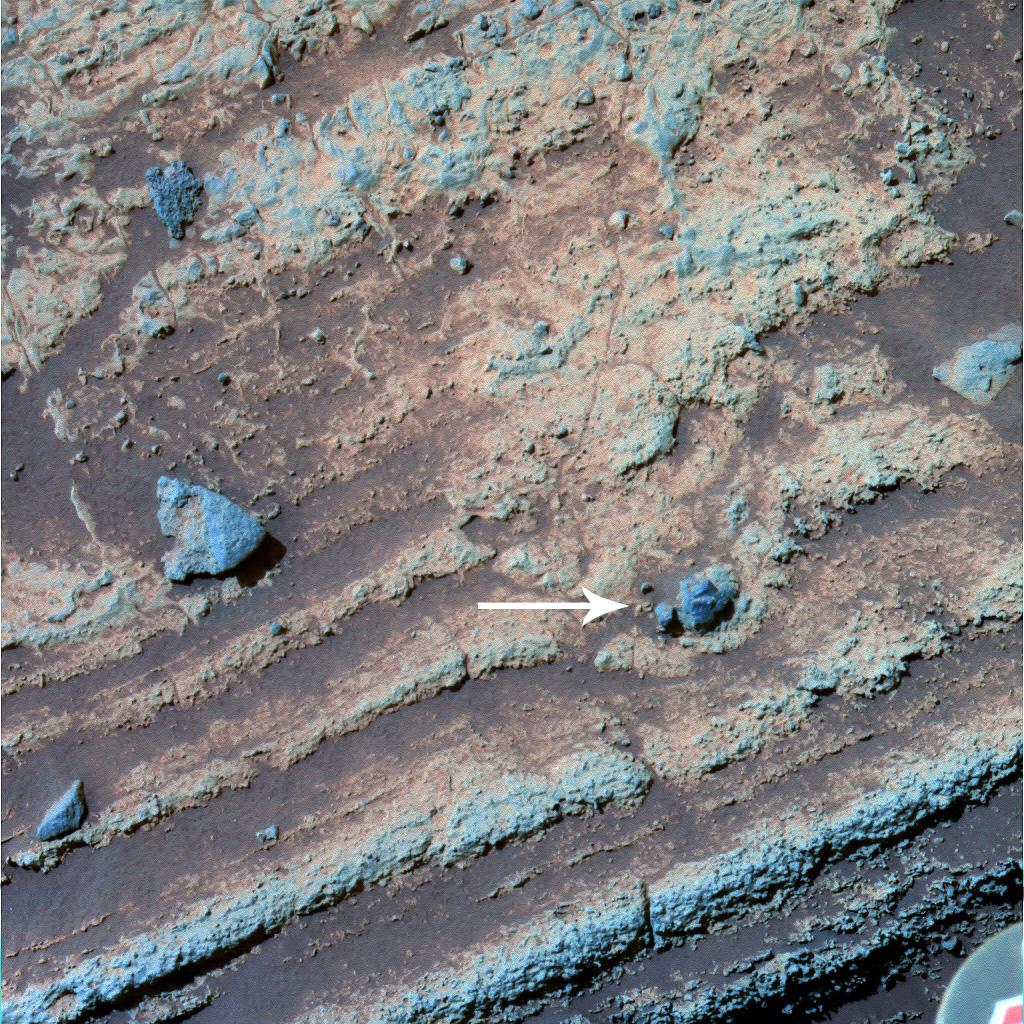
 Jin
JinOpportunity took this picture of a cobble named Jin on Sol 1519. Since the rover's shoulder joint stuck in mid-April and it was effectively stopped in its tracks en route to Cape Verde , Opportunity spent a good month taking a lot of remote sensing and atmospheric measurements.
Credit: NASA / JPL-Caltech / Cornell
The rover woke up to the new month on Sol 1518 (May 1, 2008) by taking a six-frame, time-lapse movie in search of clouds with its navigation camera. After sending its stored data to Odyssey, it shut its systems down and went into DeepSleep. The next sol the rover snapped some full color Pancam images of Jin, a cobble upslope near one edge of the Lyell outcrop, then went into a mini-DeepSleep.
During the rest of the first week of May, Opportunity scanned the sky for clouds, taking more six-frame, time-lapse movie frames with the navigation camera, and also measuring atmospheric argon with the alpha-particle X-ray spectrometer (APXS) on Sol 1520 (May 3, 2008) and Sol 1524 (May 7, 2008), as well as taking some full color Pancam images of targets called Harland and Williams. Before the week was out, on Sol 1523 (May 6, 2008), Opportunity began the first tests of its shoulder azimuth joint at cold and warm temperatures.
The story of Opportunity’s shoulder joint actually begins way back at the beginning on Sol 2 (January 25, 2004), the rover’s second day on Mars, when engineers discovered that the heater on its shoulder azimuth joint, was stuck in the "on" position. Closer investigation revealed that the on-off switch had probably failed during assembly, test, and launch operations on Earth. Fortunately, Opportunity is equipped with a built-in safety mechanism, a thermostatic switch called a "T-stat box," which provides protection against overheating. Whenever the shoulder azimuth joint got too hot, the T-stat switch is designed to automatically open and temporarily disable the heater. When the joint would get cold again, the T-stat closed. As a result, the heater stayed on all night, but not all day.
The safety mechanism worked until Opportunity approached the first winter on Mars. As the Sun began to retreat lower in the sky and solar power levels dropped, it became clear that the rover would not be able to keep the batteries charged with a heater draining power all night long. On Sol 122 (May 28, 2004), the MER team began using the workaround procedure known as DeepSleep.
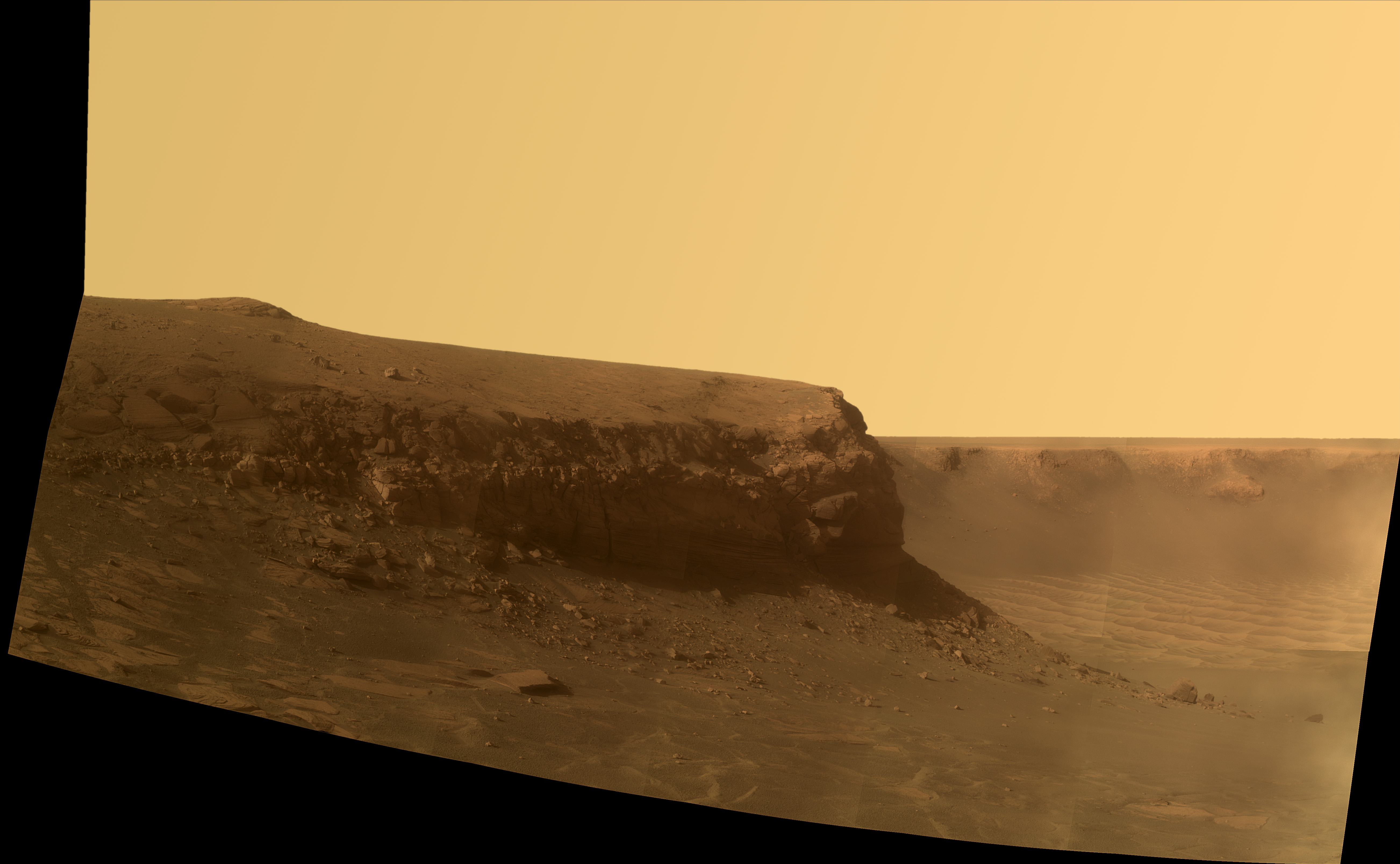 Cape Verde
Cape VerdeOpportunity took this image of Cape Verde on Sol 1487 (Mar. 30, 2008). This area was also imaged on Sol 1329 and on Sol 951, as part of the larger Duck Bay mosaic. The rover is currently in the process of driving to the base of Cape Verde to study the area with the instruments on its robotic arm. The overall soft quality of the image and the "haze" seen in the lower right portion are not dust in the local Martian atmosphere, according to Pancam lead scientist Jim Bell, but the result of scattered light in the camera optics from the dust on the front sapphire window.
Credit: NASA /JPL-Caltech / Cornell
In DeepSleep mode, the rover disconnects the batteries at night, which prevents the stuck heater -- and everything else on the rover except the clock and the battery heaters -- from drawing power. When the Sun comes up the next morning and begins hitting the solar arrays, the batteries automatically reconnect, the robotic arm becomes operational, the shoulder joint warms up, and the thermostatic switch opens, disabling the heater. As a result, the shoulder joint is extremely hot during the day and extremely cold at night. This kind of huge temperature swings, which tend to make electric motors wear out faster, were taking place every sol. Nevertheless, this strategy worked for Opportunity until Sol 654 (November 25, 2005), when the Joint-1 azimuth motor stalled, because of increased electrical resistance.
At that point, rover handlers responded to the persistent stall by delivering higher-than-normal current to the motor. This approach worked, though Joint 1 continued to stall periodically. Typically, when such stalls did occur, the engineers simply tried again the next sol and the joint almost always worked. They knew with almost certainty that the Joint-1 motor stalls were most likely due to damage caused by the extreme temperature cycles the joint experienced during its DeepSleeps.
Given those circumstances and the ever-diminishing confidence in the balky motor, the MER team, as a precaution, decided to start keeping the robotic arm out in front of the rover overnight, rather than stowing it underneath the rover deck where it would be virtually unusable in the event the Joint 1 motor failed for good. That’s when the JPL rover engineers changed Opportunity’s standard procedures for stowing and unstowing its arm. The team commanded the rover to adopt a Stow-Go-Unstow strategy, wherein it would stow its arm only while driving and unstow it immediately at the end of each drive.
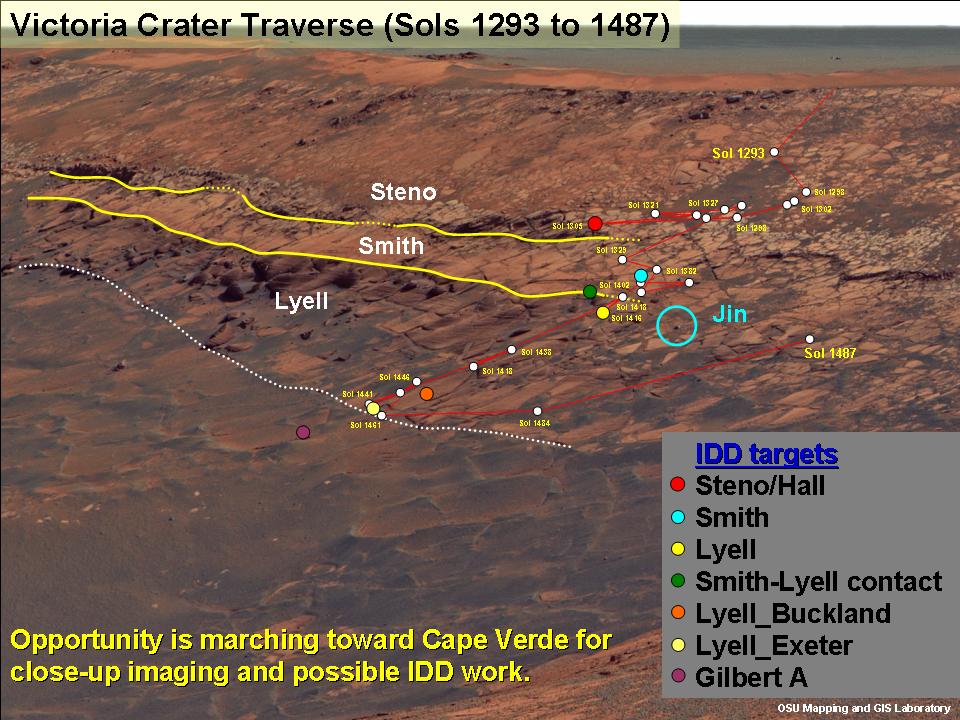 Opportunity traverse map
Opportunity traverse mapThis traverse map shows Opportunity's rovings from Sol 1293 (Sep. 13, 2007) just after it entered Victoria Crater to Sol 1487 (Mar. 30, 2008). It clearly shows the tri-band layer of rock -- named Steno, Smith, and Lyell for noted stratigraphers -- which the rover spent months checking out.
Credit: NAA / JPL-Caltech / Cornell / OSU
Opportunity roved ever onward effectively using that approach until mid-April of this year. But on Sol 1502 (April 15, 2008), the motor stalled at the beginning of an unstow operation at the end of a drive with the arm still tucked underneath the rover. Although the engineers could get the actuator or motor going, it continued to stall on all subsequent attempts, sol after sol.
In measuring the electrical resistance at various times of day on the test rover at JPL, the engineers found that the resistance was lowest – or essentially normal -- when the joint was at its warmest. That was in the morning following DeepSleep, after the heater had been on for several hours and just before the T-stat opened. They decided to have Opportunity try to unstow the arm one more time early in the morning.
Up on Mars, Opportunity began the battery of diagnostic tests on its shoulder joint on Sol 1523 (May 6, 2008). "We started with an evening test and finished it the following morning, on Sol 1524 (May 7, 2008), with the warm temperature test. “The way we test is to apply fairly low voltage levels to the actuator,” Matijevic said. “When we do that the actuator is not going to move, because the current levels are not going to be sufficient to cause it to move. But since we're applying these low voltages, we actually get a resistance check on the actuator and can measure the amount of current actually supplied. Then from the voltage and current we can determine what the resistance to the actuator is," he explained.
"It's a common troubleshoot for actuators," Matijevic said. "We warm our actuators when we can to get a little better performance out of them. It's just that in this case, we took advantage of a time when the actuator was warm and we were able to drive the actuators.”
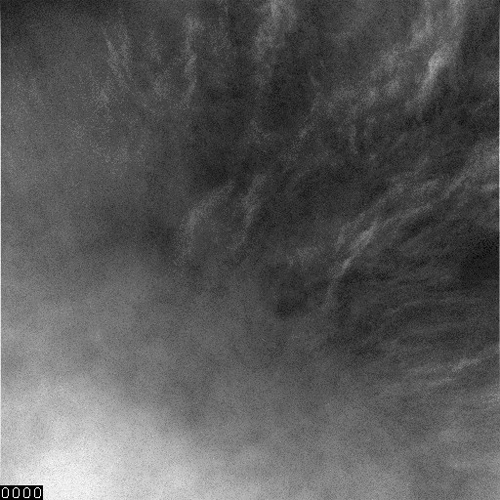 Clouds over Victoria
Clouds over VictoriaOpportunity turns its rover eyes skyward to observe clouds drifting overhead. It caught these passing over Victoria Crater in March of this year. They look similar to cirrus clouds on Earth, featherlike formations composed mostly of ice crystals.Credit: NASA / JPL-Caltech / Cornell / ASU / Texas A&M / Navigation camera
When they did these tests at nominal and cold temperatures, they got resistance values that were more than couple hundred ohms, Matijevic said. [An ohm is a unit of measurement for electrical resistance.] “The nominal values of the actuators are on the order of 32 ohms. This actuator has shown anywhere from 32 to 80 ohms, even with the winding damaged. Getting resistance values up in the 200s we would interpret that as an actuator with some severe degradation to it.”
The results indicated that electrical resistance in the shoulder motor at the warmest time of day approached normal levels. In other words, it looked like the Joint 1 would work appropriately at times when it was warmest. So, after completing these tests, the rover handlers planned to command Opportunity to conduct one more test, then try to move its stuck Joint 1.
Amidst all the testing, Opportunity continued to conduct its atmospheric observations, launching into the second week of the month on Sol 1525 (May 8, 2008) taking measurements of argon gas in the Martian atmosphere with its APXS and snapping some more time-lapse movie frames in search of clouds with its navigation camera. The rover also began taking some of the hundreds of images that will become the Garrels Panorama.
Named for Robert Minard Garrels (1916-1988), an American geochemist who applied experimental physical chemistry data and techniques to geology and geochemical problems, this monster picture will present a sweeping view of Cape Verde and the slope where the rover will exit Victoria Carter.
Garrels co-authored the book Solutions, Minerals, and Equilibria with Charles L. Christ in 1965, revolutionizing aqueous geochemistry. A professor, Garrels taught at Northwestern University, Harvard University, the Scripps Institution of Oceanography and, at the time of death in 1988 at age 72, the University of South Florida.
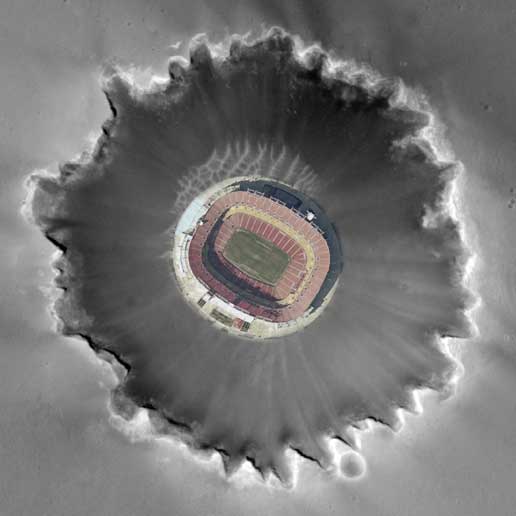 Bigger than a football field
Bigger than a football fieldThis photo composite shows an aerial view of FedEx Field in Landover, Maryland, home of the Washington Redskins, superimposed on Mars' Victoria Crater to give a sense of the crater's scale.Credit: Courtesy FedEx Field; Screenshot (c)Google Inc.
Opportunity has been shooting the Garrels Pan in a new way, Squyes noted. "During the dust storm we accumulated some dust on the Pancam optics, so one side of the camera frame is dirty and one is kind of clean. Because we have the time to do it, we're taking half-frames, then overlapping those -- obviously using the clean side -- so we'll get a prettier panorama that way," he said.
As the week ensued, Opportunity also took some full-color, Pancam images of soil targets nearby, spot images of the sky for calibration purposes, as well as more images for the Garrels Panorama and more time-lapse movie frames in search of clouds with the navigation camera.
On Sol 1529 (May 12, 2008), Opportunity conducted the test of electrical resistance in the robotic arm. "It turns out the heater that is stuck in the “on” position is the heater for that particular actuator and the only thing that turns it off is a thermostat that is external to the vehicle. “That heater is the on the same circuit in which we designed heaters for the shoulder and elevation actuator for the IDD,” Matijevic pointed out.
“Since it's kind of predictable when the heater goes on and off based on measurements we've taken now for quite some time, we planned for this test to take place at the time when the heater had been on for about two hours and the actuator was quite warm. We were able to get kind of nominal performance out of the actuator when the actuator was warm,” Matijevic said.
Two sols later, at 8:30 Mars time on Sol 1531 (May 14, 2008), Opportunity directed as much current as possible to its warm shoulder azimuth motor. After a regimen of electrical stimulation and heat, it moved its shoulder joint and swung its robotic arm back to the front, to an unstowed position.
 Opportunity at Cape Verde (simulated)
Opportunity at Cape Verde (simulated)An artist's impression of Opportunity exploring Cape Verde.Credit: NASA / JPL / Cornell / Texas A & M / Rover model by D. Ellison / simulated view by Astro0
“It moved fine,” said Squyres. “We got the arm out in front of the vehicle. Interestingly, we have subsequently done some arm tests at a more normal time of day, a time of day when the thing wasn't working previously and, in those recent tests, it looks okay, which indicates the problem is intermittent,” he offered. “Intermittent problems usually don't get better, they get worse, so we're going to play this cautiously.”
Cautiously means the MER team won’t be stowing Opportunity’s arm anymore. "Our problems in the last few weeks have indicated that we can no longer reliably stow and unstow the arm, back and forth like we were doing,” said Matijevic. “While we were fortunate for nearly two years to be able to stow it and unstow it every time we chose to drive, we just can't do that now. So, we're going to leave it out and try driving with it in that configuration. We'll have to just take a little bit of the limitation on what sort of obstacles we're going to try to drive over,” he added, noting that the team immediately began working on a strategy for driving.
In fact, the MER team spent the rest of the month making sure Opportunity could actually drive with its arm out, although this will not be the first time the rover has attempted to drive like that. "We did some minimal driving back about two years ago when we had our first problem with the shoulder joint, when we on our way over to Victoria Crate,” Matijevic remembered. “It was a little more awkward, but it was fine. Now, we want to make sure that we're not really at any risk for introducing any particular problems. This means we're going to try and do a few more things that we might not normally do with our test vehicles and see what the impact will be on the arm with it unstowed like this.
“We want to make sure the pose we've got the arm in is the best in terms of stress on the joints,” added Squyres.
Whether or not the errant heater had anything to do with the issue in Joint 1 remains to be determined, however, suggested Matijevic, “it probably is all connected.”
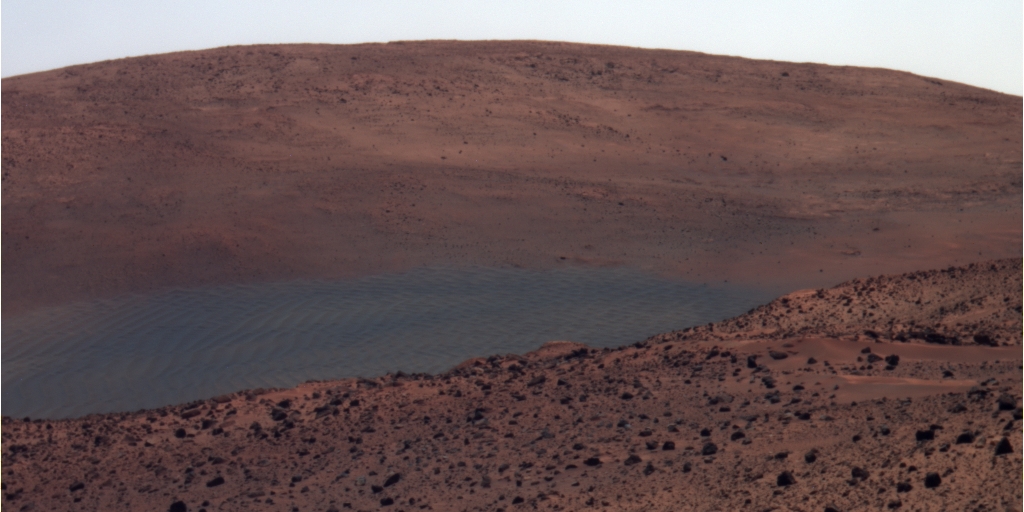
 Victoria's bottom
Victoria's bottomOpportunity took this Pancam picture of the bottom of Victoria Crater during the first week of February 2008. The camera team, led by Jim Bell, of Cornell University, rendered it in false color for this other-worldly view.
Credit: NASA /JPL-Caltech / Cornell
Being stuck for more than month hasn't been without its redeeming aspects. As May progressed, Opportunity “more than finished” the Garrels Panorama, according to Squyres, and continued measuring argon gas in the atmosphere with the APXS, taking movie frames in search of clouds with the navigation camera, and monitoring dust, as well as conducting sky surveys and taking spot images for calibration with the Pancam.
“As we’ve been completing our work on the ground doing the analysis and everything we did in the testbed and making sure we’ve dotted every ‘i’ and crossing every ‘t,’ Opportunity has just been shooting the Garrels Panorama, which is now complete and conducting atmospheric research,” Squyres confirmed in an interview yesterday.
"We also had the opportunity to take more images of Cape Verde, so we’ve been able to create a digital elevation map of the area just in front of the promontory that will help us when we're driving there," noted Matijevic.
Opportunity’s next destination is still the base of Cape Verde and despite its “arthritic” arm the intention also remains, said Squyres, “to get as close as we can to Cape Verde.” And, earlier today, the rover was to take its first drive with its arm extended out front, backing up one to two meters and out of the sand patch it had inadvertently roved onto in mid-April. “We want to get back on solid ground,” said Squyres. “Then we’ll figure out what to do next to get to Cape Verde,” he explained.
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate