
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Spirit Gains A little Power, Opportunity Loses a Little Steam

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
February 28, 2009
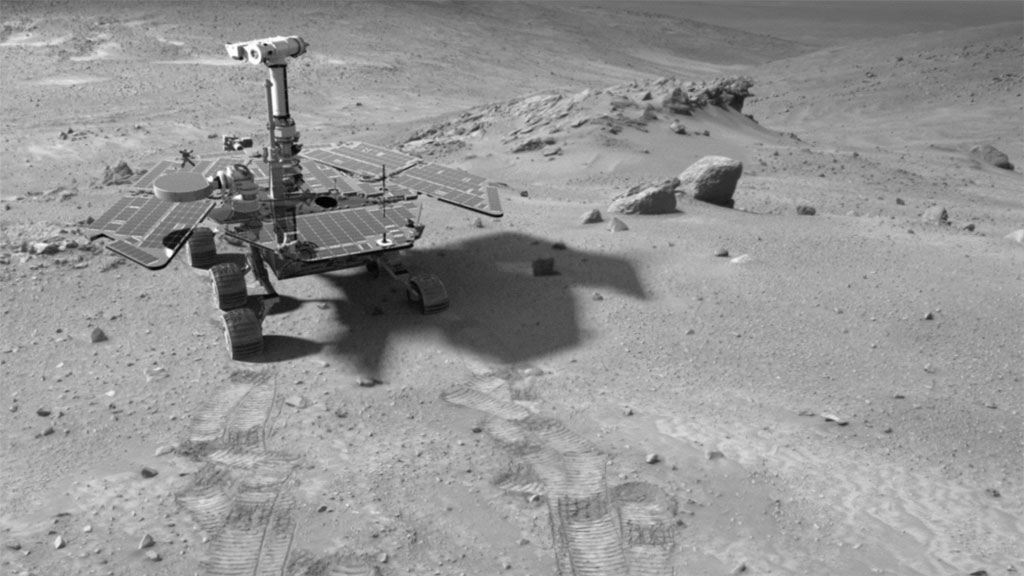
 Mars Exploration Rover
Mars Exploration RoverCredit: NASA / JPL / Dan Maas
Despite some struggles with terrain and technology, the Mars Exploration Rovers moved their missions forward in February, as Spirit and Opportunity pressed on toward their next major Martian attractions.
The best news of the month came from Spirit at Gusev Crater. Even as some observers began to write Spirit’s obituary, the little rover that could, did, with a little help this time from Mars. Just in time for Valentine's Day, the planet whipped up a series of gusty "kisses" that cleared some dust from the rover's solar panels.
The cleaning events only boosted the rover's power levels from an extremely low level of about 200 watt-hours to a modest 275 watt-hours – a little more than one-quarter the power it had shortly after landing – but it was like a shot of B12 for both Spirit and the MER team. The increase in energy has enabled the little robot field geologist to quadruple the time it spends working each sol.
"It is good news," said Jake Matijevic, chief of rover engineering at the Jet Propulsion Laboratory (JPL), where Spirit and Opportunity were designed and built and are being managed. “More energy allows us to devote more time to driving and also conduct some of the other investigations that are planned for this period.”
Although the team anticipated the spring winds, there's no guarantee with Mars of course, and this was the first time since June 2007 that Spirit has been ‘dusted.’ "This is the season for the wind and we were hoping for it and it's happening," said Ray Arvidson, the co-principal investigator of rover science, of Washington University St. Louis.
"Way back, years ago, anything under 300 watt-hours, we assumed we would be dead," reflected MER team member Steve Ruff, of Arizona State University. "We broke through this 250-watt barrier and now everyone's all excited because we've got close to 300 watt-hours. We're still constrained really, but 275 watt-hours, it's like -- we've got power," added Ruff, who is directing the science experiments with the miniature thermal emission spectrometer (Mini-TES).
Even so, the terrain Spirit confronted in February continued thwart its progress for much of the month. The rover devoted nearly three weeks trying to get onto a natural sort of ‘on-ramp’ along the northeasterly edge of Home Plate in order to drive on top of the circular volcanic formation. It is the shortest and easiest route the rover can take from its third winter haven to get to its next destinations to the south of Home Plate, a house-sized pit and intriguing mound, dubbed Goddard and von Braun.
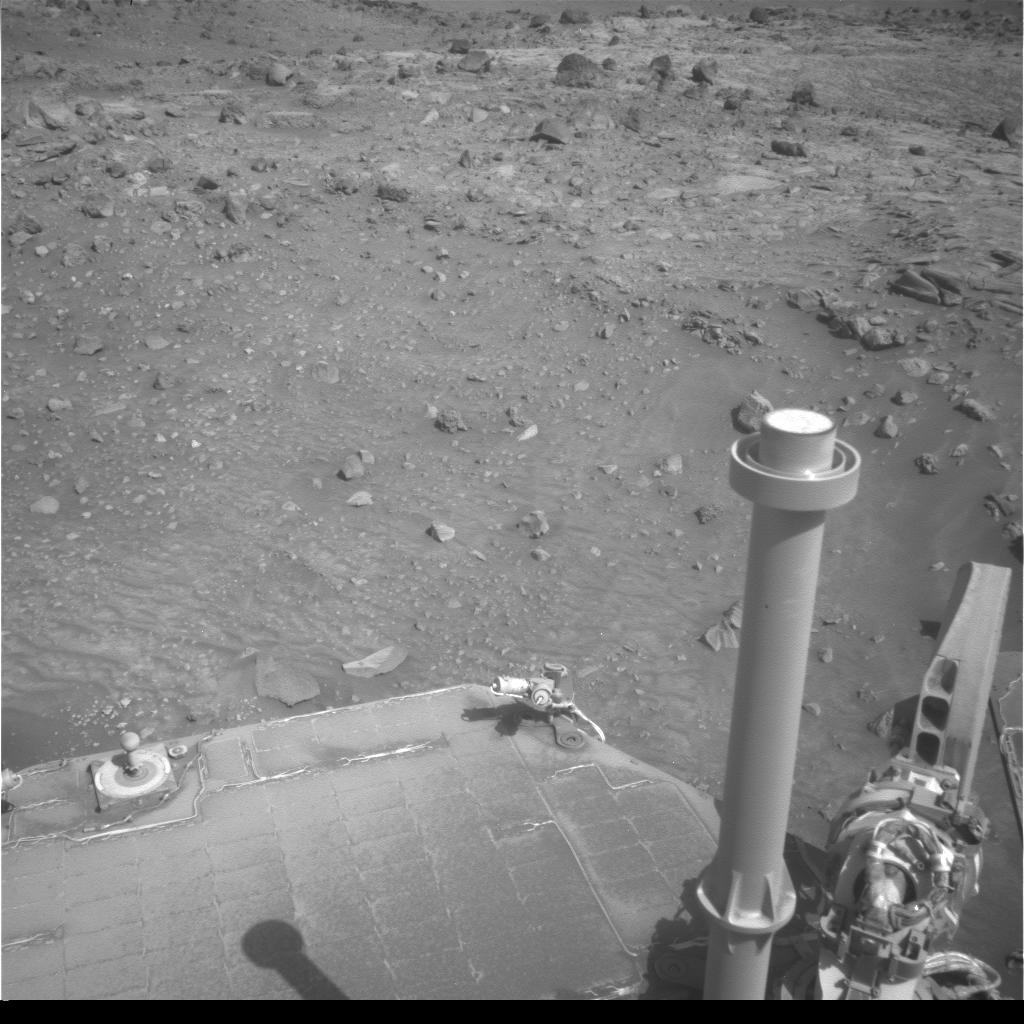
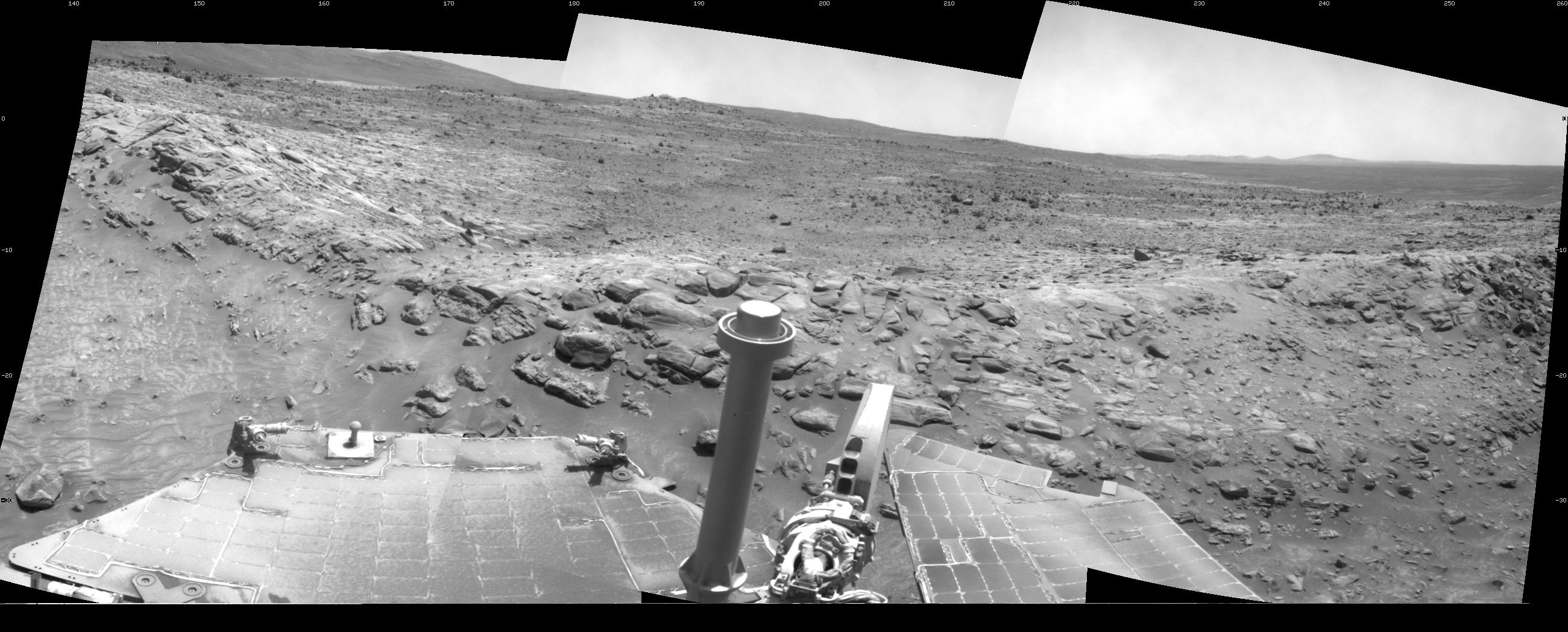 Spirit next to Home Plate
Spirit next to Home PlateSpirit used its navigation camera to take the images assembled into this 120-degree view southward after a short drive on its Sol 1809 (Feb. 3, 2009). The rover had driven about 2.6 meters (8.5 feet) that sol, continuing a clockwise route around the circular plateau called Home Plate. In this image, the rocks visible above the rover's solar panels are on the slope at the northern edge of the formation. This view is presented as a cylindrical projection with geometric seam correction.
Credit: NASA/JPL-Caltech
Spirit, however, just couldn't quite make it. "We gave up on the ‘on-ramp’ for two reasons – it was a steep slope and it was covered with sand," Arvidson said. So, earlier this week, the rover took off to the north-northeast “looking to go around a couple of ridges and back into Silica Valley (aka East Valley),” he said.
As it moved away from Home Plate this week, Spirit headed north-northeast and logged about 16 meters in three drives, stopping in an area where there appears to be a ‘pass’ through Mitcheltree Ridge, according to Matijevic. “Through this pass may be a traversable entrance to the valley east of Home Plate,” he said. The rover took some images of the area and is slated to drive a little more today to get into a better position to take more images of the ‘pass’ and the area beyond, he added.
While in the Silica Valley between Mitcheltree Ridge and Home Plate, the plan is for the rover to conduct some science as it goes. Then, Spirit will head back onto Home Plate by way of a known and previously used ‘on-ramp,’ drive across it to the south, and onward to von Braun, "maybe on the eastern side of Crossfield, the distinctive geological feature between Low Ridge and Goddard,” Arvidson said.
On the other side of the planet, Opportunity was forced to slow its ripping pace across the Meridiani plains this month. This rover is en route to a massive crater the team calls Endeavour, a hole in the ground that is 13.7 miles across, more than 20 times the size of Victoria, the crater that the rover studied in 2006 and 2007. Endeavour is so much bigger and so much deeper than any crater Opportunity has seen that it all but guarantees new mysteries for the team to unfold.
The total drive distance from Victoria to Endeavour is 18 kilometers, further than Opportunity had driven in the four years and eight months since landing. It's a journey that is expected to take about two years, according to Steve Squyres, MER principal investigator, of Cornell University. As daunting as the trek may seem, since Opportunity left Victoria last October, it's been making impressive progress and as February took hold the rover continued making 100+ meter drives sol after sol.
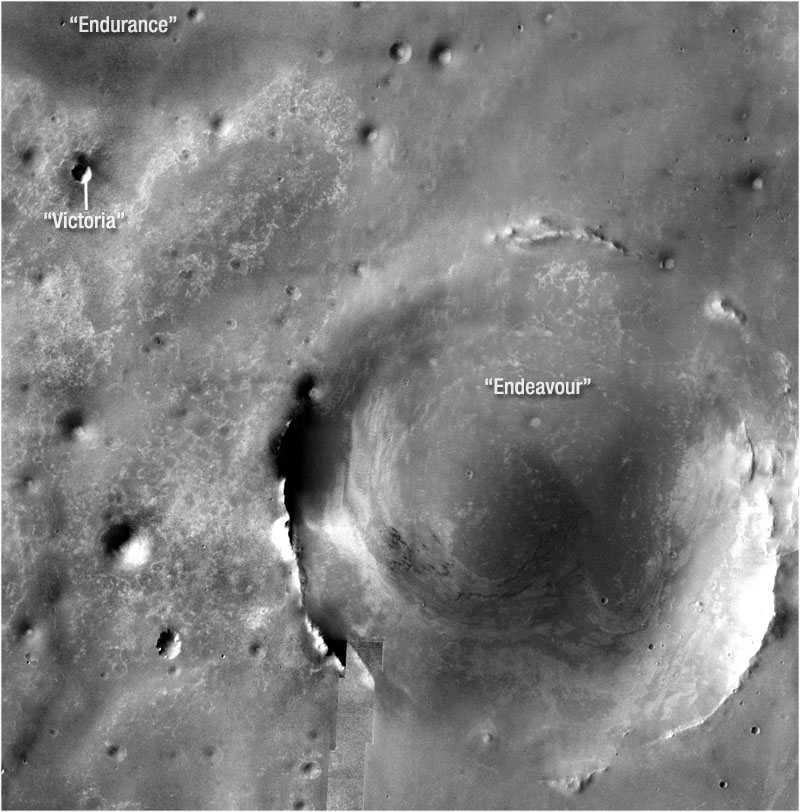 Opportunity's new Endeavour
Opportunity's new EndeavourThe MER team chose a crater more than 20 times wider than Victoria Crater as Opportunity's next major destination. The rover began the long, 13-kilometer (about 8-mile) journey on Friday, Sep. 26, 2008 with a 152-meter drive. MER Principal Investigator Steve Squyres estimates the journey will take about 2 years, with science stops along the way. The crater, which is to the southeast of Victoria, dominates this orbital view from the Thermal Emission Imaging System (THEMIS) camera onbaord Mars Odyssey orbiter. Victoria is the most prominent circle near the upper left corner of the image. This view is a mosaic of about 50 separate visible-light images taken by THEMIS.Credit: NASA / JPL-Caltech / ASU
In fact, Opportunity drove so much that it "overheated" its right front wheel when the motor that controls that wheel began drawing more current than normal. It's a symptom the MER team has seen before and the engineers knew just what to do -- instruct the rover to turn around and drive backwards for a while, and take rest periods – and that put a limit on how much ground the rover could cover in a given sol.
As March blows in on Meridiani Planum, Opportunity will be driving backwards, with some forward driving, trying to redistribute some of the lubricant inside the right front gearbox. With power levels hovering around 565 watt-hours, this rover has plenty of power. "The levels on Opportunity really haven't changed a lot over the course of the last several months," Matijevic said.
With Year 6 of exploring Gusev Crater and Meridiani Planum well underway, both Spirit and Opportunity remain in excellent health. There is little change in the operability of the seven science instruments the twin robot field geologists carry – and what little change there has been is beneficial to the mission.
Consider the Mini-TES on Spirit – it's working again. After the big dust storm in late June and July 2007, the optics on the instrument were 90% obscured while Opportunity's were 100% blotted out with the rusty red Martian powder. As the mission has continued though, the Mini-TES on Spirit seems to be getting clearer. It's now 70% obscured, reported Ruff, and appears to be improving with time. "There's a combination of things that I think is happening. One is the warmer surface temperatures that come with spring. When you're measuring with a thermal infrared instrument you get better signal-to-noise and just better data with warmer targets, and the contrast between the surface temperature and sky temperature is better at this time of year. So it's partly a seasonal effect."
There may also be some settling, Ruff said. "Because those mirrors are literally inside a tube, like a periscope, there isn't literally room for gravity to allow it to fall out. There is a little bit of an opening up at the top and the mirror, when it's oriented a certain way though, some of that dust could conceivably fall out. It is possible. But who knows? Maybe there's some combination of electrostatic phenomena and conditions where during part of the year and certain temperatures of the rover, the electrostatics favor dumping off the dust. Or maybe it's wind managing somehow to suck it out. It's all total speculation. All I can say is there has been an improvement in Mini-TES spectra over the last few months that's allowing us to really do some exploration with this instrument -- and we are now finding new silica deposits."
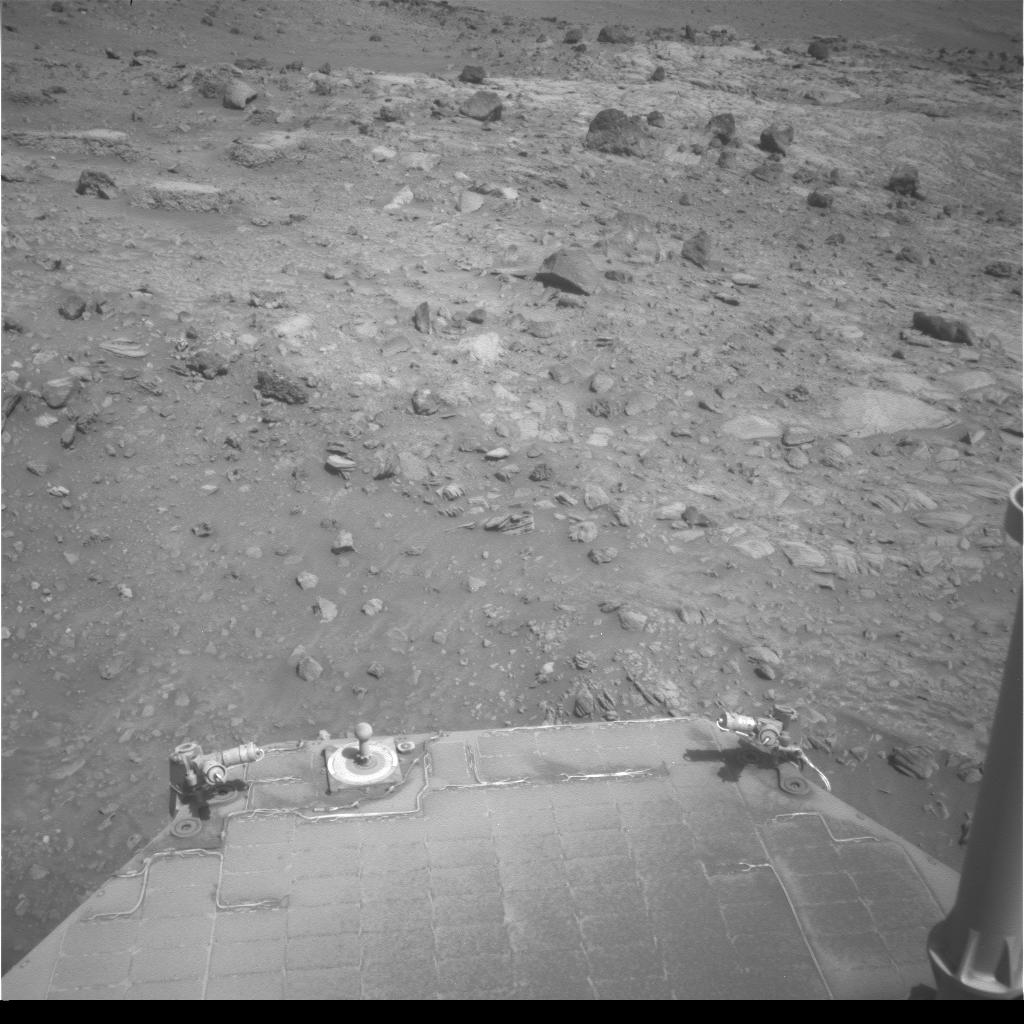
 Tracks in time
Tracks in timeOpportunity used its panoramic camera (Pancam) to take this image of its tracks on Sol 1804 (Feb. 19, 2009). Some areas are clearly perfect for the rover's long drive south-southwest to the massive crater the team calls Endevour.
Credit: JPL / NASA / Cornell
The optics on Opportunity’s Mini-TES were 100% obscured or blotted by dust in that 2007 global storm and it remains that way even though the rover has tried repeatedly to vibrate the top mirror to see if it could shake some off. "We have not seen any improvement on the Opportunity Mini-TES," said Bruce Banerdt, MER project scientist, of JPL. The team does have plans to experiment with more vigorous shaking with the lab rover on the ground and those tests, he added, should begin soon.
That leads to the other MER news this month: the newly refurbished Surface System Test Bed (SSTB) at JPL was opened for business pretty much right on schedule and the high-fidelity engineering model of the MERs is roving once more. "They brought in the train car full of crushed garnet and shoveled it into the test lab, plugged in our SSTB rover and drove it around, and it seems to be in good shape,” Banerdt reported. The rusty red color and the dust it wrought has given way to something "more like a dark gray color," he expounded. "It's more black and white than Technicolor, but presumably we'll have a lot less dust around."
The team is now testing the workaround for the RAT encoder failure on Opportunity and presumably will soon also be conducting those more vigorous shake tests on the Mini-TES.
Spirit From Gusev Crater
Spirit's next major destinations – a shallow pit the size of a house and a mound named for rocketeers Robert Goddard and Werner von Braun -- were chosen well over a year ago. Now that Martian spring has sprung, the rover's prime directive now is to get there. “There's been quite a bit of discussion over the last month of exactly how to do that," said Matijevic. “But the first steps were to get back on Home Plate and take advantage of the fact that it provides mostly flat, rocky terrain, making for a comparatively easy drive for this vehicle that is dragging a wheel."
 Spirit's winter parking spot
Spirit's winter parking spotOn Sol 1793, Spirit captured a NavCam panorama containing a view of Home Plate North, the spot where it spent its third Martian winter (and all of the Earth year 2008). Michael Howard has dropped in a computer model of the rover at its third winter parking spot, providing a sense of scale and of the steep angle at which Spirit was tilted in order to catch the waning winter sunlight.
Credit: NASA / JPL / Michael Howard
Spirit lost the use of its right front wheel years ago. The wheel is basically frozen, locked in place, so the rover has spent most of its roving life driving backwards, dragging the wheel like an anchor. It backed down the northern edge of Home and into its winter parking spot in January 2008. The hope had been that Spirit could climb on top of Home Plate from that northern edge as winter receded and from there head over the top, down and to the south. But it wasn’t able to do that.
So, in January, Spirit backed down and out of its winter parking spot, as per the original exit strategy – and on the way down it found more rich silica in an outcrop target named Stapledon.
Still, going across the top remains the best way to get to Goddard and von Braun, said Matijevic. "Other routes require the rover to drive around a significant portion of the formation and into some unknown terrains," he noted. "There is no good way around." So Spirit basically, drove right back up the slope, heading for a possible ‘on-ramp’ nearby.
As February began, Spirit was still en route to that ‘on-ramp’ in hopes of ascending to Home Plate. The terrain on the slopes is challenging, especially for a five-driving-wheel rover and the ‘on-ramp’ is a fairly narrow pathway. The rover spent a lot of time tediously just trying to get on the ‘ramp’ and in the right position to make the run up, but it kept encountering dust patches or extremely dusty, hence slippery, rocks.
 Spirit at Home
Spirit at HomeThis image shows Spirit at its winter location on the northern edge of Home Plater. The picture was taken during the southern hemisphere winter solstice at about 2 p.m. local time on the rover's Sol 1591 (June 24, 2008). Home Plate is the elevated round and light toned mesa on the right side of the image. The rover is visible at the large dark spot on the north-northeast edge of the circular volcanic formation.
Credit: NASA / JPL / University of Arizona
Avoiding dust patches and dusty rocks has been a challenge and a necessity. “The rover, to a large extent, has to look at those dusty areas in the terrain as hazards for traversability, because it has routinely gotten bogged down in those areas in drives done over the past two and a half years, since we lost the right front wheel,” Matijevic noted. "The slopes, these edges of Home Plate, are kind of collection points for dirt because of the prevailing winds. And there's a certain amount of dust coverage that has occurred over time. That has created an additional problem for the rover in trying to position to get onto the ‘ramp,’” he added. “There was a lot of a discussion about positioning and repositioning to make sure the vehicle didn't slip.”
During the first week of the month, Spirit successfully maneuvered around a rock that had previously hung up the right front wheel, but the going was painfully slow and progress was measured in centimeters. “Our back wheels, which are in front of us now because we're driving backwards, kept getting dug into this loose material,” said Banerdt. "We kept getting mired in this drift of soil blown up against the northeastern slopes of Home Plate.”
Spirit persevered and on Sol 1811 (February 5, 2009) completed a counterclockwise, 3-meter arc. On Sol 1813 (February 7, 2009), it attempted to drive cross slope to climb the approximately 14-degree ramp onto Home Plate. Basically, it backed up to give itself a little roving room in hopes that would help it to make it up the slope. But Spirit made very little progress and continued to slip and slide. The team was resigned to trying a new strategy.
 Spirit before the clearing
Spirit before the clearingSpirit took this image using the left eye of its navigation camera during its Sol 1811 (Feb. 5, 2009, just before a gust of wind cleared some of the dust from its solar panels. Contrast has been stretched to make dust on the solar panel more easily visible. Engineering data from the rover's power subsystem indicated that some dust blew off on the following sol. This image provides the before view. The reduction in the dust coating is difficult to discern in the images, but the clearing was detected and confirmed by a change in electrical output from the solar panels.
Credit: NASA / JPL-Caltech
Just as frustration was mounting, on Sol 1812 (February 6, 2009) Mars sent Spirit the first in a series of wind gusts that cleared some of the dust from the rover's solar panels and power levels began to rise. It was the first time this rover had gotten a 'dusting' since June 2007 – and it had been in dire need of one. In fact, a cleaning event was on the top of most of the team members' wish list for Spirit.
A few sols later, as the second week of the month got underway, Mars whipped up another gust of wind and a bit more cleared more dust from Spirit’s solar panels, improving the rover's power production by about 10 percent, increasing the rover's energy levels to 240 watt-hours. And the hits would keep on coming.
Spirit used its newfound power to try again to get on top of Home Plate, eventually adopting a new tact, making a lot of small moves to maneuver onto the ‘ramp,’ adjusting as moved it, to put itself in the best possible position for ascent.
“Once we traversed into this location where the ramp is located to drive back onto Home Plate, there was, as usual, a little bit of fiddling with the vehicle's orientation in order to get it to a position where it could actually drive onto and up the ramp,” Matijevic said. “There were several drives over the course of the week devoted to positioning. It amounted to turns in place and attempts to avoid certain soft terrain areas.”
In the midst of all the moves, Spirit popped a wheelie. By rover definition, that means one of its six wheels popped up off the terrain. "When we get bogged down in a particular location, you can achieve one of these wheelies," said Matijevic. "Mostly it’s the middle or rear wheel that's affected," he added. In this case, it was one of the rear wheels. However, since Spirit drives backward mostly, that is actually serving as the front wheel.
 Spirit after the clearing
Spirit after the clearingSpirit took this image using the left eye of its navigation camera during its Sol 1813 (Feb. 7, 2009). Contrast has been stretched to make dust on the solar panel more easily visible. Engineering data indicated that some dust blew off the solar array on the preceding day, Sol 1812 (Feb. 6, 2008). This image and one from Sol 1811 (Feb. 5, 2009) -- above -- provide a before-and-after comparison of the dust visible on Spirit's rear solar array. The reduction in the dust coating is difficult to discern in the images, but the rover's daily energy supply from the solar array increased by about 30 watt-hours, to about 240 watt-hours from 210 watt-hours.
Credit: NASA / JPL-Caltech
To fix that, Spirit has to drive the wheels independently to “flatten” or level out its rocker bogie suspension system and get the wheel back on the ground. “We basically have the rover drive the middle wheel backwards against the orientation of the bogie, effectively forward in this case, like moving a wheel in place. That causes the bogie to descend," Matijevic explained.
Spirit didn't quite get the wheel grounded during its first attempt on Sol 1816 (February 10, 2009), but two sols later, it did, and started to carry on with the objective at hand. One of the “unfortunate side effects” of this maneuver, however, is that there is a tendency for the wheel to dig into the terrain, said Matijevic. And that's what happened. So the rover first had to maneuver out of that situation in order to carry on.
In the sols that followed, Spirit continued to have difficulty with the terrain. It's an area that is tough enough for a six-wheeled rover to negotiate, but for one with five wheels and an anchor, it's really tough. Because of limited progress, the rover attempted a series of sharp backward arcs on Sol 1818 (February 12, 2009). While it executed 60-centimeter (2-foot) arcs 29 times, it made only 17 centimeters (7 inches) of progress because its wheels continued to slip on the dusty slope. But on Sol 1820 (February 14, 2009), Spirit drove forward and away from Home Plate, turning about 45 degrees, enough to get the wheels out of the soft, dusty patch where they had been digging in. Two sols later, it made some more successful adjustments.
These were "orientation drives," said Matijevic, to change the position of the vehicle, specifically to change the yaw orientation of the vehicle, moving the rear of the vehicle so it was in a line with the "ramp." The rover measured success in just a few centimeters centimeters or so, but it was still considered progress, he said.
Meanwhile, Mars gave Spirit something better than a Valentine or even a few centimeters of progress on Sol 1820 (February 14, 2009). It presented another gust of wind that lifted some more dust from the rover's thickly coated solar panels and boosted the rover's power to around 252 watt-hours. Then, last weekend, on either Sol 1821 or 1822, Mars smiled down again, pushing off more dust and increasing its power levels to 275 watt-hours, enabling the rover to take in 30.2 percent of the sunlight for power production. These Martian “kisses” of wind are great news for Spirit and its team.
"The hope is that we may be able to see more of these,” said Matijevic. “A lot of the discussion that goes on here is about looking forward and these are the months where we're going to be driving – a very energetic activity. We've been able to devote more time to driving with Spirit, because we've had these little cleaning events,” said Matijevic. The rover immediately went from driving just a half hour to driving and hour and a half. “And we were still able to do some science on top of that,” he added.
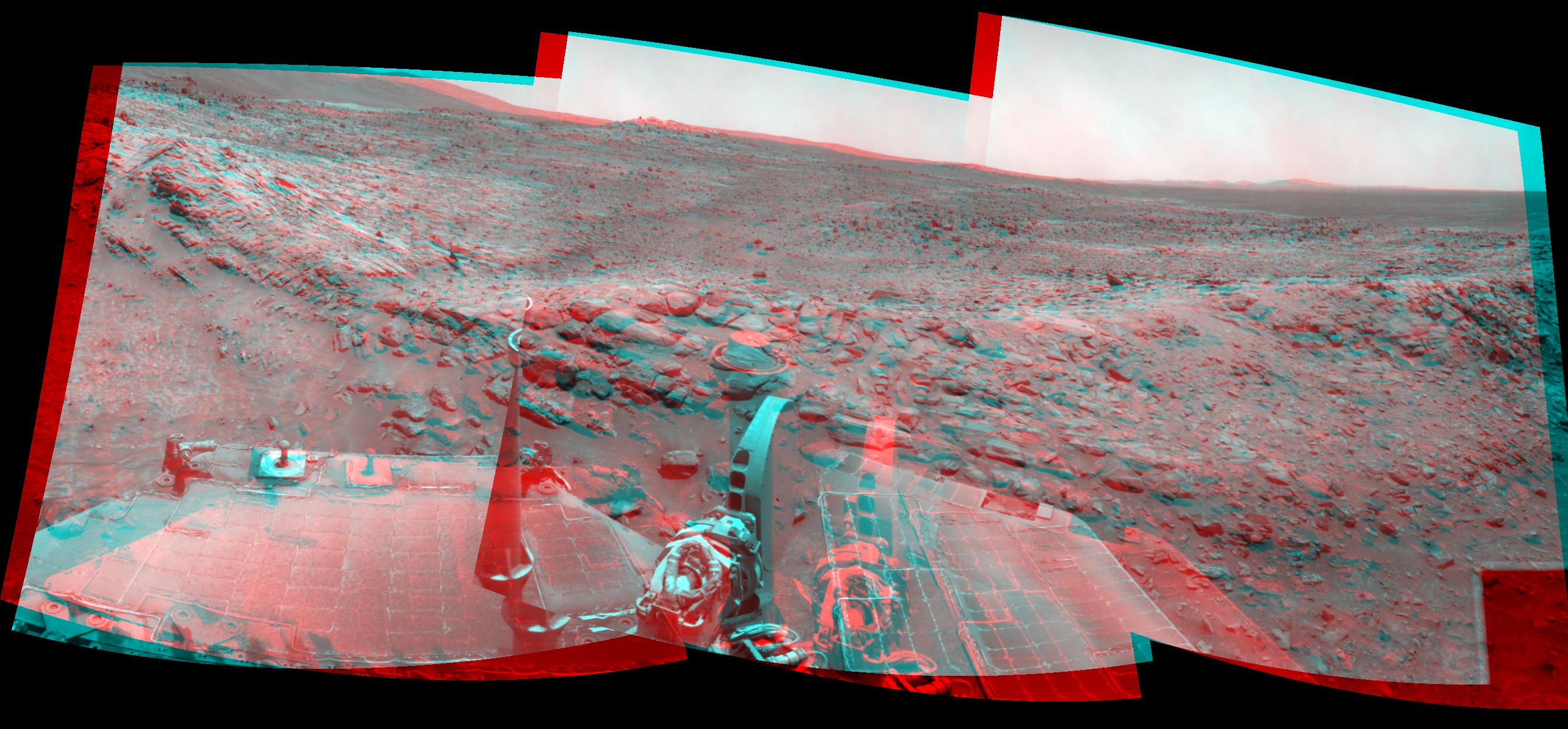 Spirit's view to the south in 3-D
Spirit's view to the south in 3-DBy combining images from the left-eye and right-eye sides of the navigation camera, Spirit's view from Home Plate toward the south appears 3-dimensional when viewed through red-blue glasses with the red lens on the left. Credit: NASA / JPL-Caltech
Through the middle of the month, Spirit continued attempting to climb on top of Home Plate. "The first, second and third priorities are making good progress toward the south and it's been frustrating,” Banerdt admitted.
As the third week of February began, the rover was still trying to move into position. It had tried to pull back and take a little more room to make its ascent and it tried to simply maneuver itself into a good position to make the run up the slope, but regardless of the approach, it just kept slipping and sliding.
Earlier this week, the team decided it was just not to be and directed Spirit to head north/northeast. The new plan would take it part way around Home Plate by way of Silica Valley, then back up another ‘on-ramp’ that the rover used in years past. While en route, it may stop to investigate a patch or outcrop or soil that could harbor silica, Ruff said.
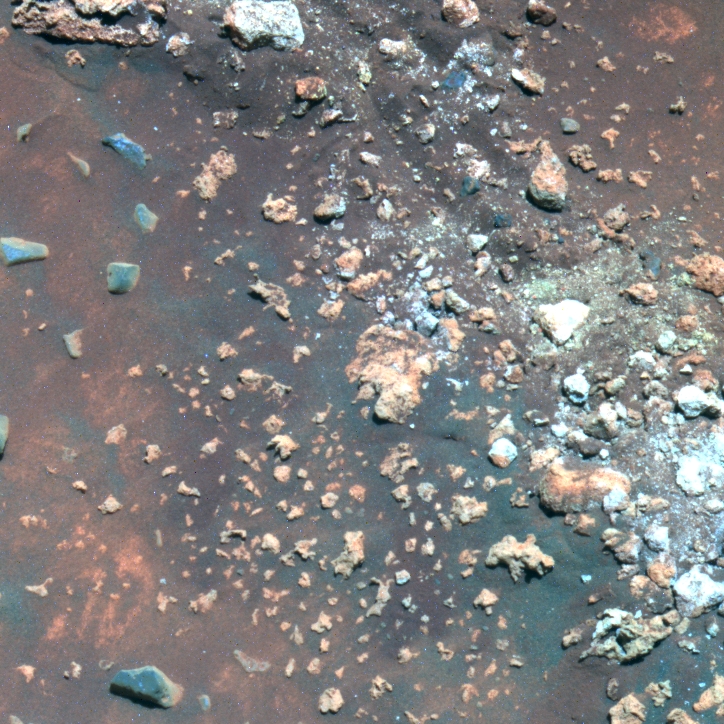 Silica rich Stapledon
Silica rich StapledonSpirit took this Pancam image of some of the silica it overturned as it drove over a target named Stapledon in January 2009. The image is rendered in false color to more easily reveal the white clumps of silica.
Credit: NASA / JPL-Caltech / Cornell
It turns out that Stapledon, the familiar looking nodular outcrop that the rover checked out last month, is 70% pure opaline silica and there are other deposits, Ruff added, around the north end. Thus, not getting up by way of the northern slope isn't by any means the end of the world. And, Ruff noted, there are some outcrops that appear much, much larger at the south end of Home Plate.
Having the Mini-TES functioning and capable of checking out these new targets is just what the team had been hoping for and a major plus for Spirit’s continuing mission.
The instrument -- which takes measurements of mineralogy and thermophysical properties of the rocks, soils, and formations in the landscape remotely -- helps the science team members to identify the mineralogy of virtually all geologic materials in the vicinity, including silicates, carbonates, sulfates, phosphates, oxides, and hydroxides. This knowledge then helps guide the rovers to targets for detailed investigation. In addition, the rovers' use the Mini-TES to measure the lower atmospheric boundary layer and provide information on suspended dust, water ice, and water vapor opacity in the skies above the them. It has been incredibly productive, especially for Spirit in recent years.
This past week, Spirit put its newfound energy to work driving. The team was actually blocking 3 hours for drives, up from just a half hour at the beginning of February and from 1.5 hours mid-month. "It is true," confirmed Ruff. "We really do feel like we have an abundance of power. Even though we are still constrained and the rover is back to working a lot more. In our very latest plans, they have put in 3-hour blocks of time power-wise to do the maneuvering and driving."
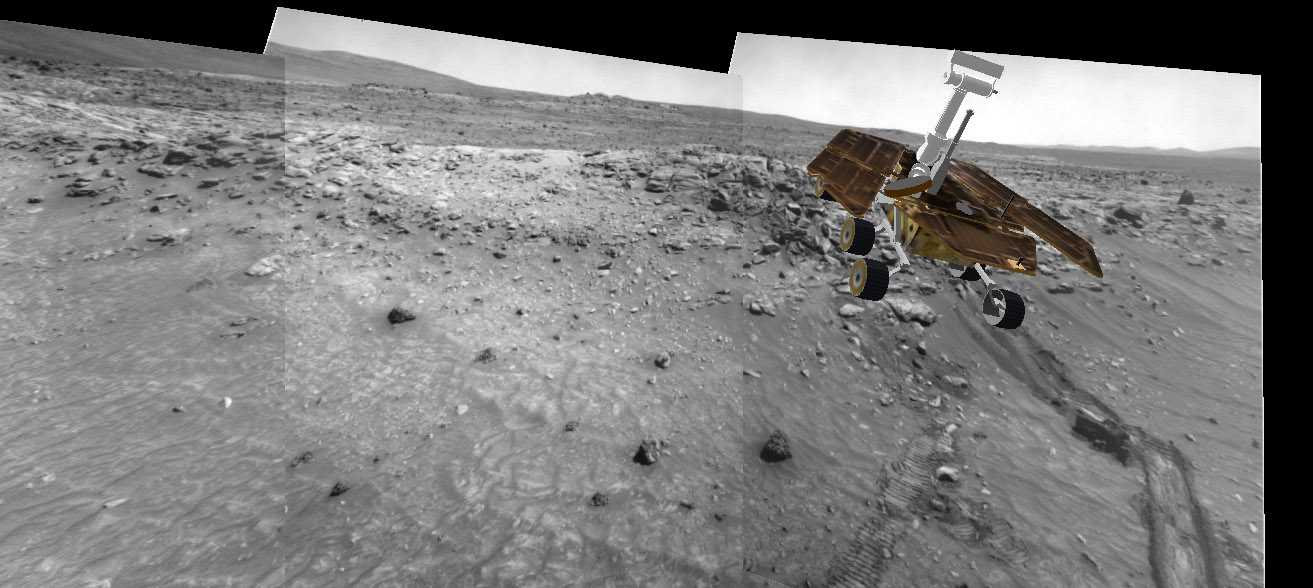
 Spirit in the Columbia Hills
Spirit in the Columbia HillsThis FX or manufactured image of Spirit in the Columbia Hills was produced using "Virtual Presence in Space" technology, developed at the Jet Propulsion Laboratory, where the rovers were designed and built. This technology combines visualization and image-processing tools with Hollywood-style special effects to create a realistic image comprised of a photorealistic model of the rover and an image taken by Spirit with its navigation camera on Sol 438(March 27, 2005). The size of the rover in the image is approximately correct and was based on the size of the rover tracks in the navigation-camera image. Since such syntheses provide viewers with a sense of their own "virtual presence," these views can be useful to mission teams in planning exploration by enhancing perspective and a sense of scale. Dan Maas created the MER model; synthetic image by Koji Kuramura, Zareh Gorjian, Mike Stetson and Eric M. De Jong.
Credit: NASA / JPL-Caltech
The MER team has been evaluating the latest HiRISE pictures, as well as old NavCam and Pancam from earlier in the mission when the rover was hanging around that area, to determine the best possible route from Home Plate to Goddard and von Braun. “The rover drivers basically have to have data from the ground in order to really be able to commit to trying a route or not, but all the orbital data makes a real difference," noted Banerdt. "We've even been looking at some of the THEMIS data from Odyssey. The resolution on that is only about 100 meters, so our whole path is like 2 pixels, therefore, it's not of great use,” he acknowledges. “However, it does verify that the places we look at in HiRISE with low thermal inertia are the places that are dusty, so it does sort of validate our approach.”
One thing they knew for sure is that they could not go due east. "There are two big ridges that are jutting out of the northeast section of Home Plate, so we have to go north, clockwise, around them in order to get into Silica Valley," Arvidson said. "Then, we'll pop up on Home Plate where we've done so before. We want to get on top of Home Plate, because it's easier to drive and it will also give us a high point to look to the south to see if we can cut across part of Crossfield. So that's the baseline path."
On Sol 1829 (February 23, 2009), Spirit finally cut loose, logging about 6 meters, Matijevic reported. The following sol, it roved on for another 9 meters and on Sol 1831 (February 25, 2009), it drove for another meter or so, covering the 10 meters or so from Home Plate to the entrance to the Silica Valley (East Valley), he said.
"There's a decision point coming up. If the Silica Valley (East Valley) doesn't look good, if that looks too dicey, then the bailout is to head west and take the West Valley," Arvidson said. "That valley – which is between Home Plate and the bump to the west named in honor of [Konstantin] Tsiolkovsky, the early Russian rocket scientist – will get Spirit into South Valley. Then we'd just drive up against von Braun and Goddard."
However the rover gets to Goddard and von Braun, once Spirit arrives, the mission effectively begins again. Goddard might be the remnants an explosive volcano, as Squyres has pointed out. That’s something Spirit hasn't seen yet. And von Braun – who knows? Time of course waits for no rover. Before too long, Spirit will again have to begin preparing for the next Martian winter. "We have to be parked for winter in early November," Arvidson said.
 Bonestell Panorama
Bonestell PanoramaThe Bonestell Pan is all its glory. This panorama shows the view from Spirit's winter parking spot off the northern edge of low plateau dubbed Home Plate. A dotted line marks the edge of Home Plate, which is about 80 meters or 260 feet in diameter. The rover took the images with its Pancambeginning on its Sol 1477 (Feb. 28, 2008) and finishing on Sol 1691 (Oct. 5, 2008). Spirit stayed in place for most of 2008 because of the low energy available to it during the Mars' southern hemisphere winter. It finally began shifting position to adjust its tilt on Sol 1709 (Oct. 23, 2008), but the rover's location at the end of 2008 is within about a meter (3 feet) of the position from which this panorama was acquired.
Credit: NASA / JPL / Cornell / New Mexico Museum Natural History & Science
As the Sun gets higher in the sky and more dust gets blown off the solar arrays, which the team now cautiously anticipates, Spirit's energy levels should show a continued up tick in March. And, the rover is back on the trail of silica and the discoveries could get even bigger, literally."We've found silica in an entirely new place, so we're sort of expanding the distribution from the East Valley to the North Valley," said Ruff.
"What gets more interesting is that for more than a year now we thought, from the HiRISE images and even Pancam and NavCam images at the south end of Home Plate, that in between Home Plate and Goddard and von Braun are more of these really eroded, ridge-like outcrops that look like larger scale versions of what we've been seeing the East Valley and now the North Valley," added Ruff.
Fortunately, Spirit has had no recurrence of the flash of memory loss and disorientation that it suffered in January. The engineers are keeping an eye on its accelerometers, which they thought might be part of the problem, but during the last four weeks, everything seems to be operating just fine and Spirit has been completely normal. So for now, if Mars cooperates, there will be more sunny days ahead for Spirit.
Opportunity from Meridiani Planum
As February took hold on Mars, Opportunity was racing along the Meridiani highway, logging 100+ meter drives throughout the first week of the month. The rover has been employing a drive strategy that involves a combination of methods: an initial segment of blind driving, where the rover follows commands sent from the ground, followed by a segment where the rover uses its "smarts" -- D-star global navigation – to drive negotiate the terrain on its own.
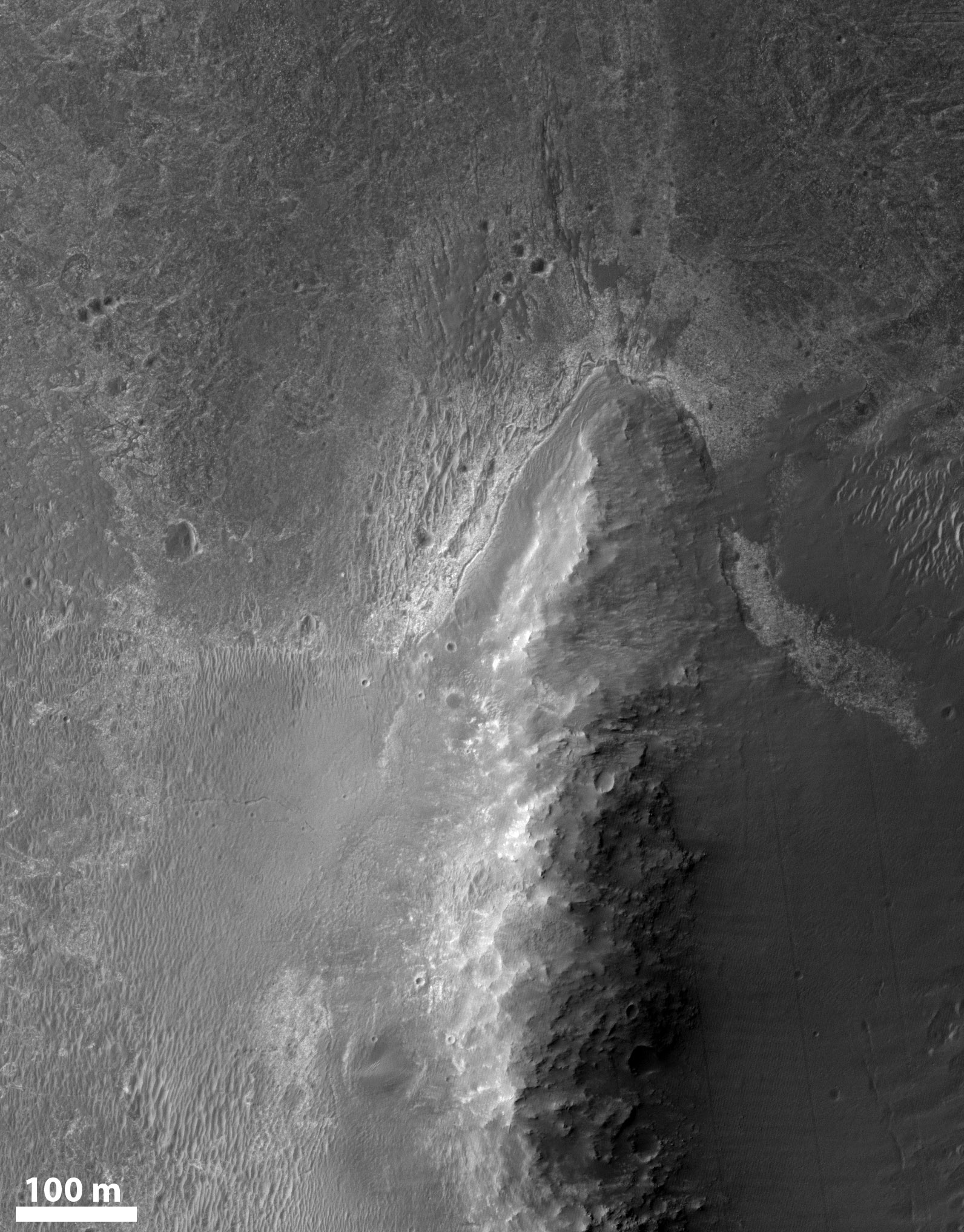 The eroded rim of Endeavour Crater
The eroded rim of Endeavour CraterA small segment of this HiRISE image, taken from MRO, covers the eroded rim of Endeavour Crater, which pokes above the Meridiani plains. Opportunity is on a long journey to reach this massive hiole int he ground. NOTE: The scale bar is a guess assuming that the map-projected HiRISE image had a resolution of 25 centimeters per pixel; no geometry information was available for the photo. Credit: NASA / JPL / UA
Maps provided by the the HiRISE camera team from the Mars Reconnaissance Orbiter (MRO) are also an integral part of making it possible for Opportunity to make these long, 100-meter drives. From the pictures the rover routinely takes at the end of each drive and the HiRISE images the team can actually position the rover on these maps.
"We are not only able to make distance assessments, but we are also able to do good localization here with a fairly limited imaging set," Matijevic said. "That's not so simple to do given the fact that we're driving in terrain that is basically featureless. You can't really tell any difference in these dune forms, one from the other." That, he added, has actually made it an "interesting combined activity" for the rover planners and the position estimation team from the science group.
Opportunity didn’t complete every long drive. On Sol 1791 (February 6, 2009), for example, it drove for only about 27 meters (89 feet) before it slightly veered into a keep-out zone, which automatically terminated the drive. And, as the second week of the month got underway, it drove some 58 meters (190 feet) on Sol 1793 (February 8, 2009) and once again encountered a terrain situation where the global navigation software, unable to find a safe solution to proceed, stopped the drive.
The rover resumed its pace on Sol 1795 (February 10, 2009), logging a smooth 136-meter (446-foot) drive. The very next sol, it drove for 123 meters (404-feet), pushing its odometer past 9 miles, establishing yet another rover mileage record on Mars. And on Sol 1797, it logged an 111-meter (364-foot) drive.
During that trio of drives, however, Opportunity's right front wheel got hot. “One of the things we saw in the drive pattern from Sol 1795 through Sol 1797 was a steady increase in the right front wheel drive current," Matijevic confirmed. "We've seen this before when we've done significant continuous forward driving on the rovers.”
 Changing terrain
Changing terrainOpportunity has to chart a course through two kinds of Martian terrain -- one hard and smooth, the other soft and sandy, both of which are shown in this flicker pic, comprised of fairly recent images the rover took with its navigation cameras and Pancam. Paving the way are flat-lying rocks formed long ago with help from liquid water. Threatening to bury the rover's wheels are waves upon waves of sand ripples. Both features fill the region that separates the Mars rover from Endeavour Crater. The trick is not getting snared in another purgatoid or sand dune trap.
Credit: NASA/JPL-Caltech/Cornell
Opportunity previously suffered this over-heating on its right front wheel while on the path from Endurance to Victoria and again while doing drives around the rim of Victoria. "There is something about the design of these vehicles that tends to place addition strain on the right front wheels as we're driving forward,” Matijevic said. “We've seen this after the rovers have completed significant numbers of forward drives.”
Moreover, Opportunity's right-front wheel has had a jammed steering actuator since April 2005 and that wheel is turned inwards about 7 degrees from straight ahead. On long drives, that matters. "When we drive, it has to work a little harder because it's not going directly in the drive direction in terms of the rotation and it tends to heat up a little bit," explained Arvidson.
On Sol 1800 (February 15, 2009), the MER team had Opportunity conduct a series of mobility diagnostic drives so they could study the right front wheel and monitor the current levels. The rover turned around and drove backward about 10 meters (31 feet), turned around again and drove forward about 11 meters (36 feet), and then performed an arc of about 4 meters (13 feet). It performed as expected.
“Our remedy for this is basically to ask the drivers to turn the vehicle around and drive the vehicle backwards," said Matijevic. "We introduce some rest periods as well, because that generally helps. But it takes a couple of weeks usually for the lubricant in the right front gear box to sort of redistribute. Once it does, then generally the currents that are required tend to lower as a consequence and you can go back to driving forward again," he explained. So, on Sol 1803, Opportunity backed onward about 50 meters.
The plan for the near term is for Opportunity to continue driving backwards, with occasional forward drives, to see if that improves performance. The team expects that it will do the trick, although backward driving will limit the distance traveled each sol.
 Onward
OnwardOpportunity has been putting its pedal to the metal ever since it left Victoria Crater in October 2008. It's been making regular 100+-meter drives but this month has to slow its pace, because it was over-heating its right front wheel. This image, which the rover took with its Pancam was enhanced with humor by Stuart Atkinson, a space enthusiast from the United Kingdom.
Credit: NASA / JPL / Cornell / Stuart Atkinson
“These will be mostly blind drives," Matijevic said. "The reason is because of the configuration of the vehicle and the fact that we don't have a very good way of driving with D star navigation and taking images of the rear with the navigation cameras."
The D-star global navigation system, which was part of the RN2 software uploaded in 2006, uses NavCam images taken every meter or two by the rover as it moves and processes them into a hazard map.
"That map is basically doing a bootstrap extrapolation for one set of images to the next and what the D-star part of it is actually doing is creating a path plan for the rover through the terrain. It's building this terrain map in real time as the rover drives along," Matijevic explained.
"The front images that are taken can actually look pretty much just over the front part of the solar panels to the terrain that's 10 meters in front of the vehicle with the navigation a camera," he continued. "The trouble with the views that are taken in the back is that there's equipment, the solar panels and antenna, etcetera, that create obstructions. Basically, there hasn't been a good algorhythm developed to be able to bootstrap those images the same as we do from the front."
Driving blind alone puts a limit on how far Opportunity can go in a given sol, because the safety assessment of that drive by the ground crew is based on images taken by the rover at one location. So the 100+meter drives are on hold for the time being. “By ground processing – depending on the terrain course – about 50 meters is the limit. That's as far as you can process to create an image that gives you the necessary confidence that the vehicle is not going to drive into some kind of trap or other kind of problem," Matijevic said. "As soon as the current drops to normal level, then we can turn around do the long forward drives."
Opportunity spent this past week preparing, then building the image of the R9.3 flight software load – a patch to the R9.2 software that has been used in operation of the MER vehicles for nearly two years. The team plans to switch the rover to the R9.3 software this evening following a drive.
Since Endeavour is still so far away, the team is focused on keeping Opportunity roving along. It departed from Victoria heading south-southwest and basically will continue on that trajectory for another 7 kilometers (about 4.3 miles). Then, it will turn and drive east for another 5 kilometers (3.1 miles). "The path we're going to take is something like an L-shaped path as opposed to a direct path to the crater, because we're trying to avoid large dune forms that we have seen in the HiRISE images," Matijevic explained. "The path we chose looks like we'll skirt these larger dune forms, but it's added an extra 5 kilometers (3.1 miles) to the total distance," he noted.
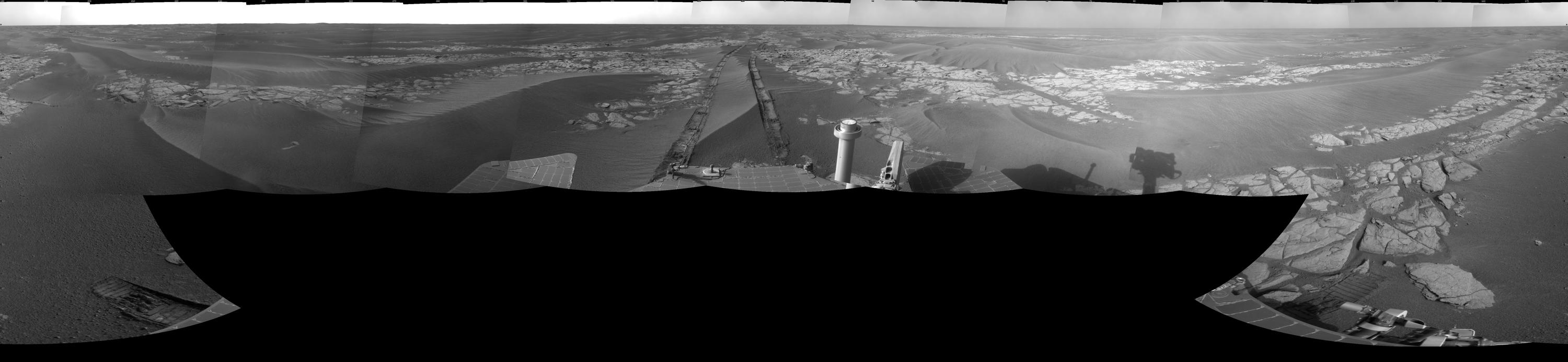 A kilometer south of Victoria
A kilometer south of VictoriaOpportunity used its navigation camera to take the images combined into this full-circle view of the its surroundings just after driving 104 meters (341 feet) on its Sol 1770 (Jan. 15, 2009). North is at the center; south at both ends. Tracks from the drive extend northward across dark-toned sand ripples and light-toned patches of exposed bedrock in the Meridiani Planum region of Mars. For scale, the distance between the parallel wheel tracks is about 1 meter (about 40 inches). The rover's position after the drive was about 1.1 kilometer (two-thirds of a mile) south-southwest of Victoria Crater. This view is presented as a cylindrical projection with geometric seam correction.
Credit: NASA / JPL-Caltech
While the rover has been making excellent progress on its long journey to Endeavour – it’s already driven 3 kilometers (about 1.9 miles) since leaving Victoria – the crater remains, the way the rover drives, 15 kilometers away. So, as March roars in at Meridiani, Opportunity's agenda remains the same -- drive as much as possible.
Sporting upwards of 565 watt-hours, this rover has plenty of power. It's easily taking in 60% of the available sunlight, twice as much as Spirit – and it's in good health. "If we see interesting bedrock or maybe some more of these meteorites we will – judiciously – stop and smell the roses," Arvidson offered. "But Opportunity has a long way to go.”
Despite Valentine's Day, there were no roses for Opportunity to stop and smell in February and during the next couple of years, months of all driving and very little science will not be unusual.
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate