
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


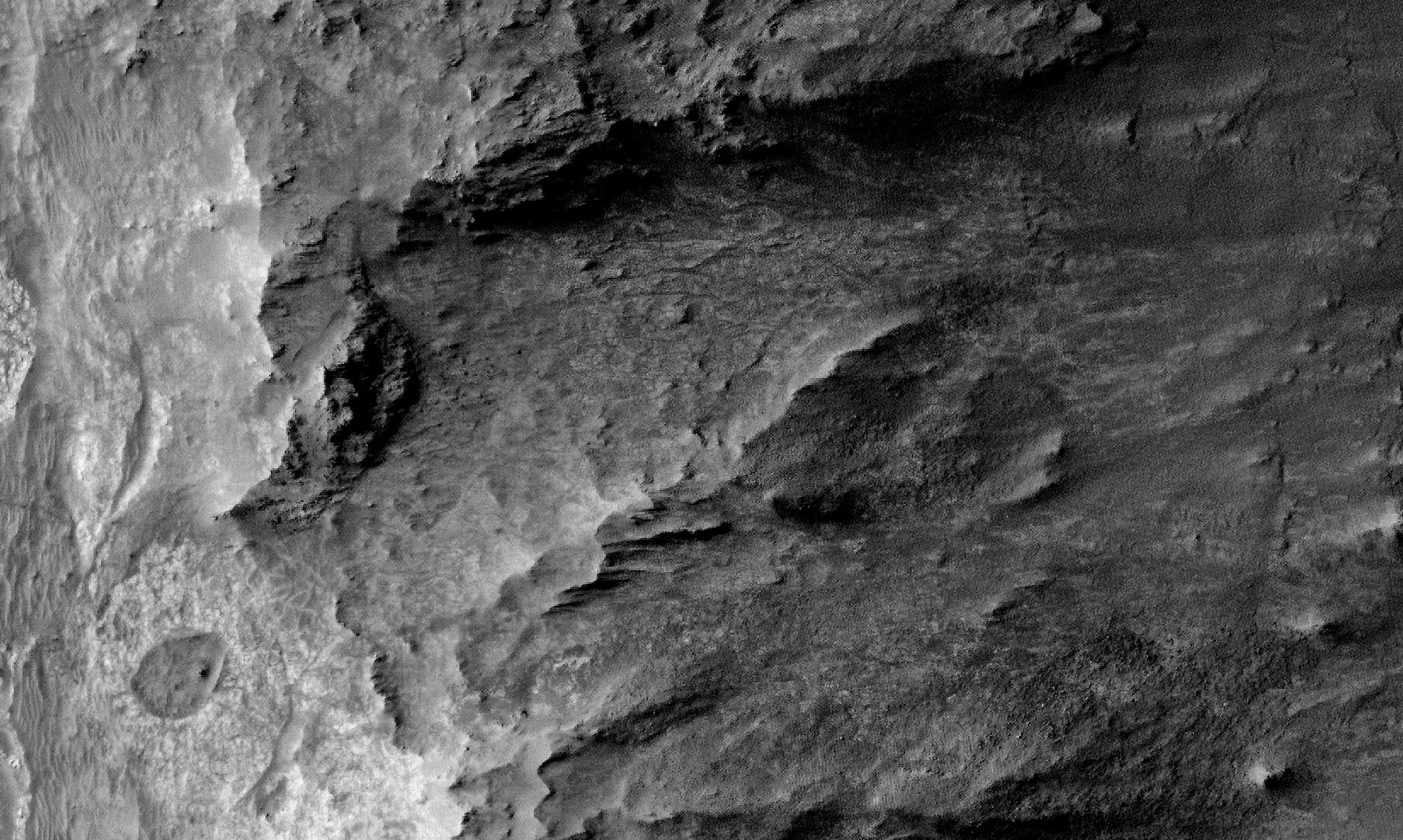
Mars Exploration Rovers Update: Opportunity Sleuths New Site for Smectites

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
May 10, 2016
Mars Exploration Rover
NASA / JPL-Caltech / Maas Digital
After capturing a rare image of a dust devil whirling through the interior of Endeavour Crater at the end of March, Opportunity and the Mars Exploration Rovers (MER) team pressed on through the Martian winter and spent April sleuthing for clay minerals at the mission’s new site on the southern wall of Marathon Valley.
The robot field geologist dedicated the first half of the month to a walkabout around the site, which is located on a gentle slope near the head of the valley where it cuts into the western rim of Endeavour, a 22-meter (13.7-mile) diameter crater. From the images Opportunity sent home, the MER scientists chose an outcrop in what appears in orbital data to be a field of ancient clay mineral residue, and the rover spent the rest of the month examining a target there up close.
“We’re on the very southwestern part of the site, in the middle of a science campaign,” said Ray Arvidson, MER deputy principal investigator, of Washington University St. Louis, at month’s end.
The MER team has been working to uncover the clay minerals along the southern wall of the valley since the mission’s seventh Martian winter began to set-in last October. Although the scientists know the clay mineral remnants are there, definitively finding and characterizing their exact locations is still a work in progress.
Clay minerals – hydrous aluminum phyllosilicates known to feature iron and magnesium, in geological jargon – are a big deal on Mars for two reasons: they form in the presence of water; and they have been linked to the emergence of life on Earth and the theory of abiogenesis.
With both of Opportunity’s own mineral detectors out of commission, the team has been relying on the Compact Reconnaissance Imaging Spectrometer for Mars (CRISM), onboard the Mars Reconnaissance Orbiter (MRO), to help guide the rover to choice locations. The orbital instrument searches for the signatures of minerals that form in the presence of water, and in 2009, while Opportunity was still en route to Endeavour, the spectrometer detected phyllosilicates in the form of clay minerals in various locations along Endeavour’s western rim, including a mother lode of a type of clay minerals called smectites in Marathon Valley.
A year or so after pulling into Endeavour’s western rim in August 2011, Opportunity and the MER mission made history on Matijevic Hill at Cape York, becoming the first to groundtruth the presence of clay minerals on Mars, and within the oldest Martian terrain or strata ever found by a ground-based mission, called Matijevic Formation. The quest since then to uncover more examples of these landmark findings has been a challenge.
The MER team’s mineral map – when placed over a topographical map of the Marathon Valley – shows “a one-to-one correlation,” between the clay mineral signatures CRISM has picked up and so-called red zones that feature rocks, outcrops, and bands or stripes in the ground that are a deeper, darker red than everything else in the landscape. That, according to both Steve Squyres, MER principal investigator, of Cornell University, and Arvidson. A co-investigator on CRISM, Arvidson, with a little help from his colleagues and students, created the map using additional data from the orbital instrument.

Dust devil captured
Opportunity captured this rare image of a Martian dust devil twisting through the Marathon Valley with her navigation camera (Navcam) on the mission’s Sol 4332 (Mar. 31, 2016) NASA-JPL released it on Earth in early April. The view looks back at the rover's tracks leading up a north-facing slope that forms part of the southern wall of the valley, near where the robot spent April sleuthing smectites.NASA / JPL-Caltech
One theory put forth shortly after the robot field geologist entered Marathon Valley last July is that the clay minerals would be found inside the deep red rocks and outcrops they were seeing, and the deep red swirls or bands in the terrain. That hypothesis, however, is not neatly playing out.
When Opportunity worked on red zone features on the floor of the Marathon Valley however, the team found the rocks “too crumbly,” as Squyres put it, to accurately determine chemical composition. Then, the robot’s attempt last month to reach an in-place outcrop near the top of a steep slope on Knudsen Ridge that all but promised to give up some of Mars’ smectite secrets was valiant, but proved futile.
What the MER scientists have found so far is that the landscape here along the southern wall of Marathon Valley and Knudsen Ridge is composed of impact breccia hurled up and formed during the creation of Endeavour billions of years ago. The more ancient Matijevic Formation first uncovered on Matijevic Hill, is nowhere in sight, likely because Opportunity is topographically higher than where the Matijevic Formation would be. So where exactly are the smectites?
CRISM is picking up smectite signatures from all over Marathon Valley. That would seem to indicate the remnants of ancient clays are hiding in plain sight. Or, in other words, the minerals may well be so well integrated that they are part of the terrain, which is another hypothesis the scientists have discussed. It appears now that the two theories are meshing.
Despite the absence of Matijevic Formation at the rover’s current site, what the MER scientists are finding is actually “very reminiscent” of what they discovered at Cape York, according to Arvidson. On Matijevic Hill, “the real leeching toward aluminous smectites was in Esperance, the fracture,” he noted. “Otherwise, what we found were basically iron smectites that have the same composition as basalts, and that’s like what we're finding here.”
That is to say, although the whole outcrop that Opportunity is checking out now appears altered a little bit (because even rock is somewhat permeable), the water flowed primarily where the MER scientists see cracks and fractures today. “That's what I think we're seeing in the flat polygonal breccias in Marathon Valley,” said Arvidson.
There is more work to be done however before the MER scientists have all they need to finish the smectite story at Marathon Valley.
For Opportunity, the month was fairly work-a-day, but April “showers” in the form of a couple of issues slowed her pace a bit. One issue is mechanical and familiar. The rover’s arthritic right front wheel began drawing more power again during her attempt in March to get to a rock near the top of Knudsen Ridge, and the issue lingered into April, and that drew the engineers’ attentions.
The other issue is electronic and relatively new, involving a couple of camera hang-ups that stopped the action when Opportunity tried to take some close-up pictures. Some similar glitches have occurred with the Panoramic Camera (Pancam) and the Navigation Camera (Navcam) in previous months, so the mission appointed a tiger team to investigate. As annoying at the issues were, they weren’t enough to stop this rover for long.
“While the tiger team is extremely busy looking into the camera issues, the mission rolls on with surprisingly few disruptions,” said Nelson. “Opportunity is doing quite well, and we're still exploring, and doing things.”

Smectites on Earth
Opportunity is on the hunt for the clay mineral smectites in Marathon Valley. This picture is a close up image of the crinkly, cracked surface typical of smectites found on Earth. Unfortunately, the remnants of smectites on Mars have not been this obvious, but the MER team knows that they're there and the search to uncover them continues.University of Pittsburgh / Norris W. Jones
It will take some weeks to finish up the search for smectites in Marathon Valley, but the rover’s sols here look to be numbered. “We’re going to be getting ready to leave Marathon Valley before too long,” Squyres announced. When exactly and where the rover would go, he would not say for sure.
“Broadly speaking we’re going to be continuing to the south, but the specifics of the route are the subject of our extended mission proposal currently under review at NASA, so I don’t think it’s appropriate to talk about it right now,” he said.
At present, the MER mission is funded only through the end of this year. Every two years the mission must submit a new proposal, a new plan for another two-year extension, and the team’s tenth extended mission proposal was sent in to NASA Headquarters on April 14th, a day before the deadline.
The competition for every NASA dollar is as tough as it gets. Despite the MER mission’s achievements, records, and global popularity, its proposal for an extension will be considered along with proposals from every other planetary mission that is past its primary mission and still in operation with work to do, a compelling plan, and a well-written proposal that defends that plan.
The MER team leaders are cautiously confident about their proposal. “It’s exciting,” said John Callas, the MER Project manager at the Jet Propulsion Laboratory (JPL), the NASA center all America’s Mars rovers call home, of the proposed two-year plan. “We continue to have great science objectives for the rover even after 12 years. It's unique science and different from anything Curiosity can do. We feel [the proposal] justifies continuation of this rover for another two years and that it will be well received.”
“It’s good. It’s really, really good,” Squyres added.
The team has been informed that a Senior Review panel will meet to consider its proposal during the last week in May, said Callas. The panel’s decision will be made in the weeks following, once all the missions applying for funds have been evaluated.
While the MER team has every good reason to be confident, as NY Yankee great and American sport philosopher Yogi Berra put it: “It ain’t over ‘til it’s over. The waiting now is, like always, the hardest part. But the MER ops team has a lot more to do than wait.
As May peeks over the horizon on Mars, winter is fading, spring is slowly emerging, and the skies are mostly clear. Opportunity is producing plenty of power and working away on the mission’s science campaign, ready to dig into the outcrop the team has named after Pierre Pinaut, one of the boatmen on the Lewis & Clark Expedition.
Supported by the most experienced rover ops team on Earth that is guiding and commanding her every move every sol and handling the day-to-day intricacies and complexities of operations, Opportunity and the expedition only have time now for roving onward.
“We’re doing fine,” said Squyres.

NASA / JPL-Caltech / Cornell / ASU / NMMNH / L. Crumpler
Walkin’ about
Geologist- volcanologist Larry Crumpler plotted Opportunity’s April 2016 walkabout on this image, a view into the interior of Marathon Valley that Opportunity acquired after completing her study of the “purple” rock, Jean Baptiste Charbonneau back on Sol 3937 (Feb. 19, 2015). It shows “the lay of the land,” noted Crumpler. For most of the mission’s seventh Martian winter, the rover has been off image to the left, deeper in the valley and on steeper slopes. Research Curator for Volcanology & Space Science at the New Mexico Museum of Natural History and Science, Crumpler is a member of the MER science team.Opportunity woke up to April with a command to take off on a walkabout of the missions’ new site. Stretching about 35 meters northeast to southwest, it is located on a slope in the southwestern part of Marathon Valley’s southern wall. The rover pulled into the new site in late March, after backing down from Knudsen Ridge, driving across part of the valley floor, and then ascending the wall again via this congenial slope.
The plan was for Opportunity to quickly survey this site, which is, according to the CRISM map, rich with strong evidence for clay minerals, boldly displayed on the team’s map with red pixels. From the documentary images the rover would take, the MER scientists could identify surface targets of interest on specific outcrops, for detailed, up-close investigations. At each of three stations or drive destinations on the walkabout, the rover would follow the same protocol and take images for a 360-degree Navcam panorama and a Pancam panorama, as well as targeted multi-filter (color) panoramas.
Basically, the robot field geologist and her team would scout targets that would give them “maximum probability,” as Arvidson put it, of finding a rock the rover could investigate up close, in its natural state, brushed, and then grinded. The rover was ready to roll.
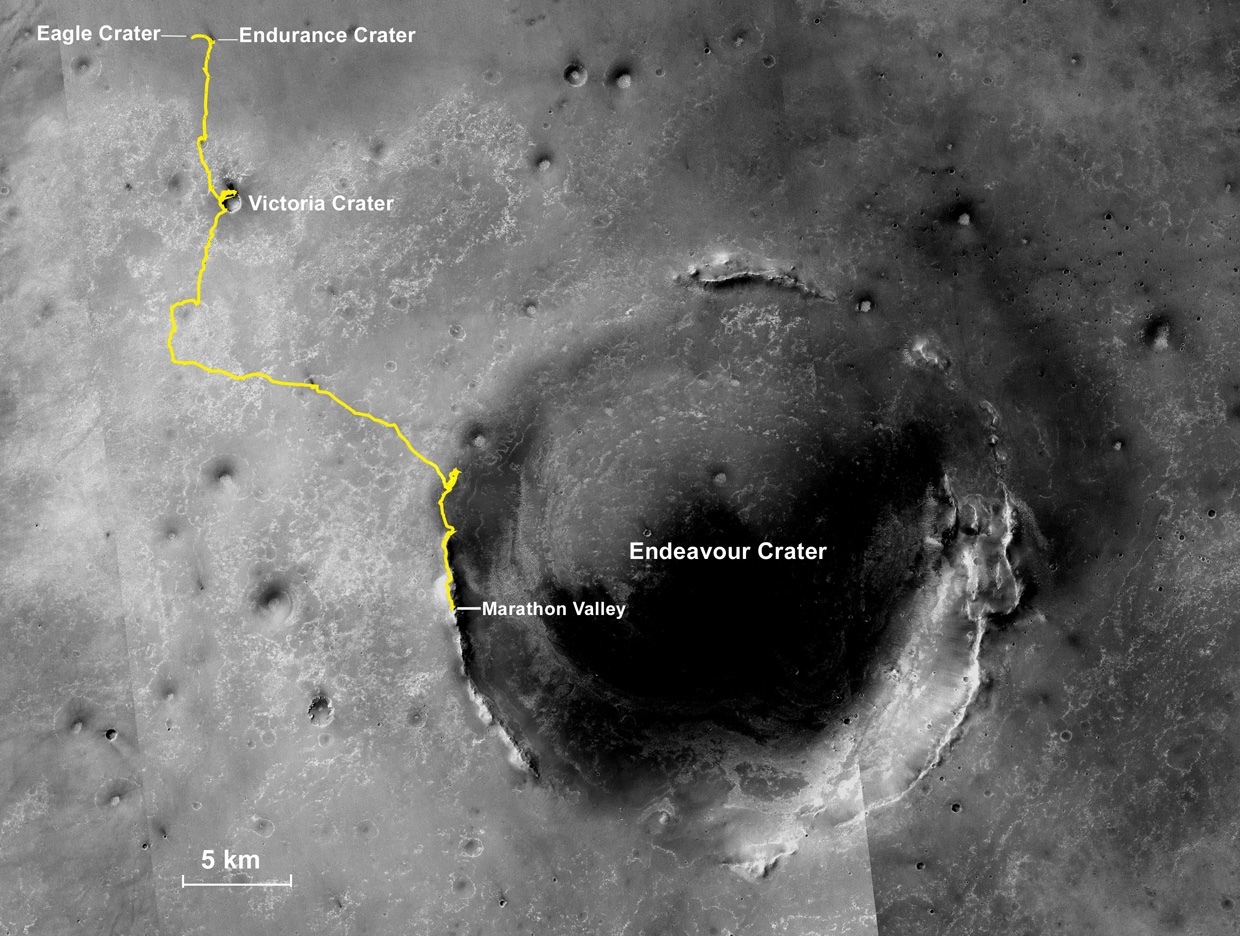
Oppy’s expedition so far
The gold line on this image shows Opportunity's route from the Eagle Crater landing site to her approximate current location. Since August 2011, the MER mission has been exploring the western rim of Endeavour Crater and in July the rover entered Marathon Valley. The base image for the map is a mosaic of images taken by the Context Camera onboard the Mars Reconnaissance Orbiter (MRO). Larry Crumpler, of the New Mexico Museum of Natural History and Science, provided the route add-on.NASA /JPL-Caltech / MSSS / NMMNHS
Opportunity began the month producing power levels hovering around 650 watt-hours, more than two-thirds its capability after landing in 2004 with sparkling solar arrays. The Tau or atmospheric opacity of 0.470 was about average for a waning Martian winter, so the skies were relatively clear. The rover’s solar array dust factor of 0.817 was stellar, enabling the solar–powered robot to utilize more than 80% of the sunlight hitting the arrays for energy.
The veteran rover began the walkabout on Sol 4334 (April 2, 2016), taking off and heading west with a 15.4-meter jaunt (50.52 feet), collecting Navcam and Pancam images before and after the drive to station 1. Two sols later, Opportunity turned southwest and drove another 15.5 meters on her walkabout on Sol 4337 (April 5, 2016), taking more images before and after the drive, which took her to station 2.
During the first week of the month, the robot also checked out her Rock Abrasion Tool (RAT) bit to assess remaining grind capability in preparation for an in-depth analysis, “The RAT bit is still looking good,” said Gale Paulsen, Senior Systems Engineer & Deputy Director at Honeybee Robotics & Spacecraft Mechanisms Corporation in Pasadena, the company that created the RAT. “We haven't observed any reduction in the bit in more than a few years.”
Because her energy levels were “very good,” after spending the day taking the images for a multi-frame Pancam panorama, Opportunity was able to stay up late on Sol 4338 (April 6, 2016) and collect an atmospheric argon measurement with the Alpha Particle X-ray Spectrometer (APXS), part of a routine, mission-long study on Mars’ atmosphere.
From the data Opportunity returned following her first two drives of April, the MER engineers saw that the rover’s right front wheel was still drawing higher current than the other five wheels. The robot has previously experienced this and the team worked around it by having the rover drive backwards whenever possible.
The issue returned actually in March when Opportunity was climbing Knudsen Ridge and trying to reach a Pvt. Whitehouse rock target near the top. But since then, the rover deployed the team’s mitigation strategy, giving the wheel something of a rest when she backed down the ridge and then drove mostly backwards up the valley floor and to her current location. “We think it’s the terrain more than anything else, but we’re watching it,” said Bill Nelson, chief of MER engineering at JPL.
Just to make sure there were no small rocks that might be fouling the wheels, the team sequenced a set of 'cleat cams' or sub-framed Hazardous Camera images of the front wheels on Sol 4339 (April 7, 2016). “There were none,” said Nelson. “The terrain that we're driving on has kind of a crust to it and the wheel cleats kind of grab into that and that can cause higher current. But that right front wheel is more sensitive than the others and we really don't know why.”
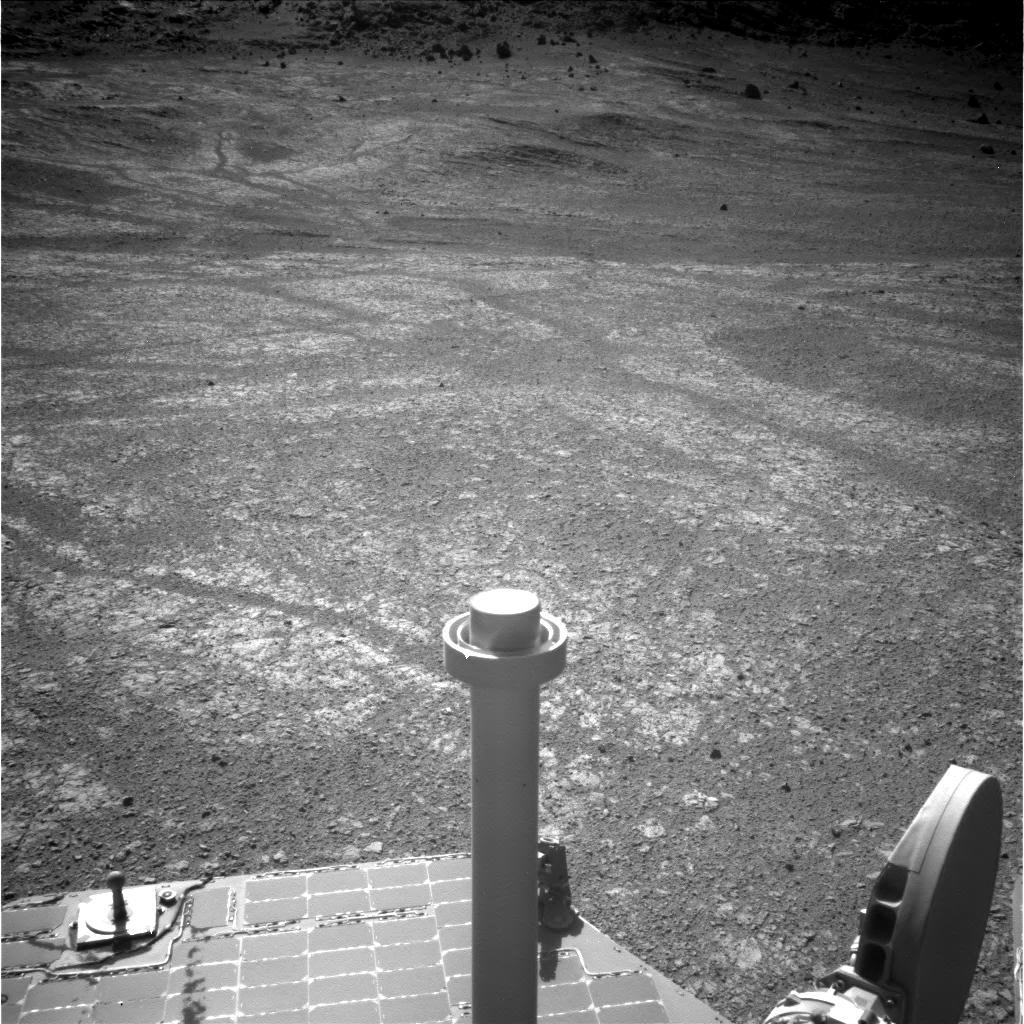
Beginning the walkabout
Opportunity began a walkabout of the mission’s new site, which orbital data indicate is rich with ancient clay minerals typed as smectites. Located in the southwestern part of the southern wall of Marathon Valley, the site is not far from where the valley cuts into Endeavour Crater’s rim. T he rover took this image with her Navigation Camera on Sol 4334 (Apr. 2, 2016). It shows the robot’s first stop, station 1.NASA / JPL-Caltech
As the second week of April got underway, Opportunity pointed her robotic arm at the diffuse sky on Sol 4340 (April 8, 2016) and took a set of pictures with her Microscopic Imager (MI). These sky flats as they’re called are calibration images. The rover also took more Pancam and Navcam panoramic images of the geological scene around station 2.
The next sol, the robot field geologist continued the walkabout, driving another 13.7 meters (44.94 feet) to the southwest to set up for imaging at station 3. She spent the rest of the week there taking images with her cameras, homing in on an outcrop the team named Pierre Pinaut. (Note: some historical texts spell Pinaut, Pineau). On Sol 4345 (April 13, 2016), the robot took a Pancam half-frame, color image of the outcrop.
“There are three Pierre Pinaut targets, 1,2, and 3, located on the southwestern part of the walkabout near station 3,” said Arvidson. “We laid them out for the IDD [Instrument Deployment Device] folks and Rover Planners to decide where we should go with a maximum probability of finding a target that we could check out naturally, and then brush it and acquire MIs and APXS, and then grind it and look at the inner surface up close.”
Pinaut-2 was rejected, so the MER ops team commanded Opportunity to drive to Pinaut-1. Opportunity turned about 90 degrees and bumped forward 2 meters (about 6 feet) to Pierre Pinaut-1. She put her IDD or robotic arm over the target in preparation for her close-up examination. The next sol, 4346, “we did general purpose Navcam of the area or, basically, remote sensing,” said Nelson.
During the third week of April the rover focused her Pancam “eyes” on Sol 4347 (April 16, 2016) and began taking the pictures needed for a detailed panorama of the entire area, including numerous pictures of the red pixel areas, the places on the CRISM map that showed where the orbital spectrometer picked up the strongest smectite signatures.
“That's first thing we did and then the rover started IDD work on Pinaut-1,” said Nelson. Following the in-depth science protocol, the robot positioned her MI and successfully acquired the pictures needed for a mosaic of the undisturbed surface, and then placed the APXS on the target to glean the rock’s chemical make-up.
In reviewing the images sent home, the Honeybee team determined that it was “not ideal for a RAT placement for a brush or grind,” as Paulsen put it. “I believe the surface was a bit too rough or there were particles in the work area we needed to avoid.”

Cleat cam
Opportunity’s right front wheel drew higher than desired current as she tried to reach a Pvt. Joseph Whitehouse rock target atop Knudsen Ridge in March, where the robot recorded a record setting tilt of 32 degrees. When the wheel continued to draw more current than the other five wheels even after she left that steep site, the MER ops engineers had the robot take this raw image, what they call a ‘cleat cam,’ in early April with her front Hazard Camera (Hazcam) to see if any small rocks were fouling the wheel. “There were none,” said Bill Nelson, chief of MER engineering, at JPL.NASA / JPL-Caltech
On Sol 4348, Opportunity took a six-frame cloud movie with her Navcam, as well as more CRISM images of the local outcrop around her. Everything was going well and the MER team settled on Pierre Pinaut-3 as the target spot where the rover could do the whole experiment, to fully document an outcrop rock in this ancient smectite field in its natural state, after the surface is brushed, and then after grinding into the surface. “We want to see how composition changes with depth,” explained Arvidson.
The plan was for Opportunity to move her IDD or robotic arm to reach Pinaut-3, which is off to the right a little bit from Pinaut-1. Then, on Sol 4350 (April 19, 2016), just as the plan was to get underway, an anomalous camera fault on the MI shut the rover’s science down and the activities in that plan did not complete. The MI just stopped. This issue was new, sort of – and it’s a puzzler.
“We planned the move from Pinaut-1 to Pinaut-3 and were going to do a Mössbauer touch to position the MI, then take the pictures with the MI for a mosaic, and everything was lined up – and then the MI just hung up,” said Nelson. “Because it hung up, it used all time allocated for entire activity and so none of this science plan was completed. And then, the rover shut down.”
After the MRO pass though which Opportunity downlinked her sol’s work, the rover turned on her APXS as previously commanded. The team assumed the chemical sniffing instrument was on Pinaut-3. “It wasn't because the MI hung up, and the APXS never got moved, so we ended up with an APXS argon measurement,” said Nelson. Since this data would contribute to the mission-long study of the Martian atmosphere, the time wasn’t wasted. “We did get some utility out of it,” said Nelson, “but it wasn't what we wanted.”
Similar events happened in previous months with the rover’s other cameras. Last August for example, the team confronted an anomaly with the Pancam. "We noticed that a few times over the [previous] hundred sols or so that a late afternoon sequence would time out and not run to completion, without any obvious explanation," said Planetary Society President Jim Bell, of Arizona State University (ASU) then. The data returned from those events indicated the timeout errors were of no danger to the cameras or to the rover and that issue resolved itself, at least for the time being.
Opportunity carried on. The following sol, 4351 (April 21, 2016), the rover took some more Pancam images of the area and did another APXS of what the team thought was Pinaut-3 “and it turned out to be another argon observation,” said Nelson.
As soon as that data arrived on Earth, the team issued a command for Opportunity to conduct two sets of camera diagnostics on the cameras on Sol 4352 (April 22, 2016). This time, the first stereo MI images completed successfully, but the rest of the diagnostic didn’t take place,” said Nelson. And the camera’s dust cover was open. “We wanted to close it, but because the image we were taking was so close to the surface, and because the dust cover swings out in front of the MI, we were concerned something we didn’t want to happen might happen, so we left it open.”
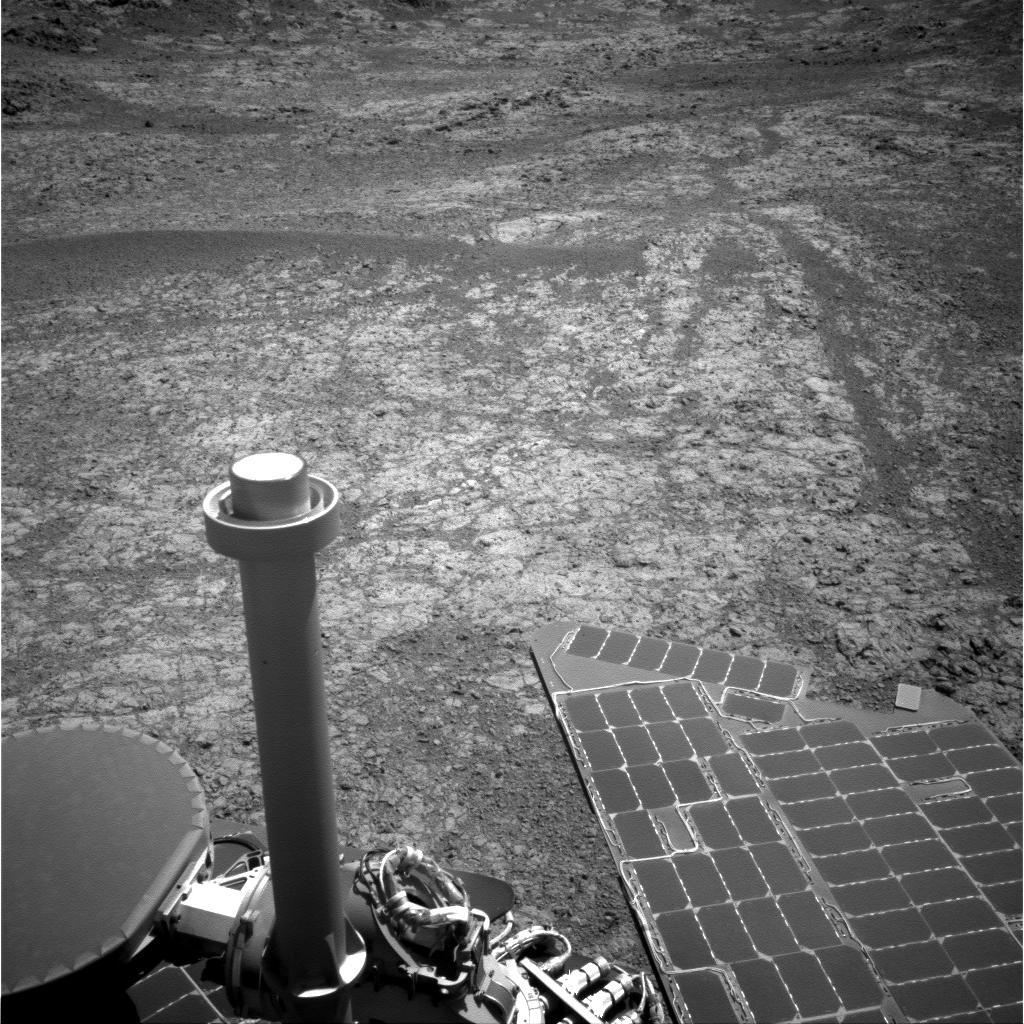
Walkabout, station 3
Opportunity pulled up to station 3, the last station on her walkabout and took this image with her Navcam on Sol 4341 (Apr. 9, 2016). Here, the MER scientists found the rock target they were looking for, one that would welcome an in-depth investigation, complete with brushing and grinding.NASA / JPL-Caltech
Both before and after the MI camera anomaly, the robot field geologist took several Pancam panoramas of what the team is calling a CRISM area to groundmap the red pixel areas on the mission’s mineral map of Marathon Valley, and those all completed normally.
A second attempt to diagnose the MI shutter stutter later that afternoon did not complete, but this time it was because of timing errors in the commands to the camera. “We commanded a sequence that is supposed to stop imaging and let the buffers clear and allow us to take another image,” said Nelson. “Because we didn't allow enough time for that to execute, it was still cleaning up the imaging when we issued the second command to take an image, so the second imaging command was rejected. We gave a little bit of time and issued another command, but it was cleaning up the cleanup,” said Nelson. “So the only MI images we got was the stereo image earlier that sol.”
As Opportunity continued taking Pancam and Navcam panorama pictures of the CRISM area the following sol, the ops engineers at JPL were discovering that the camera diagnostic didn't work. “But we also knew it gave us good MI images,” said Nelson. So the MI imaging initially planned for Pinaut-3 on Sol 4350 (April 19, 2016) was planned and repeated successfully on Sol 4354 (April 23, 2016).
Once the rover finished taking the commanded close-up pictures, the MI closed the dust cover, and everything worked as it was designed. The robot then placed the APXS on the target to determine the rock’s chemical composition. The really good news is that “here doesn’t appear to be any real change in the camera’s lenses, as far as dust contamination on the lenses of the MI,” Nelson said.
“Fortunately (or unfortunately, depending on your perspective), [these events] are rare enough that it's really hard to assign a root cause,” noted Bell. “Happily, however, they don't appear to be causing any harm to the cameras or other systems, just some occasional loss of data.”
Still, the camera glitch issues have occurred enough times now to elevate concern among the engineers. The thinking now is that these events may be caused by something gone awry in the avionics or rover electronics, and a tiger team was assembled in April to look into the matter. “We don't think the problems are within the individual cameras, although we can't be absolutely sure of that,” said Nelson. “Since the events seem to be showing up with all of the cameras however, we don't think so.”
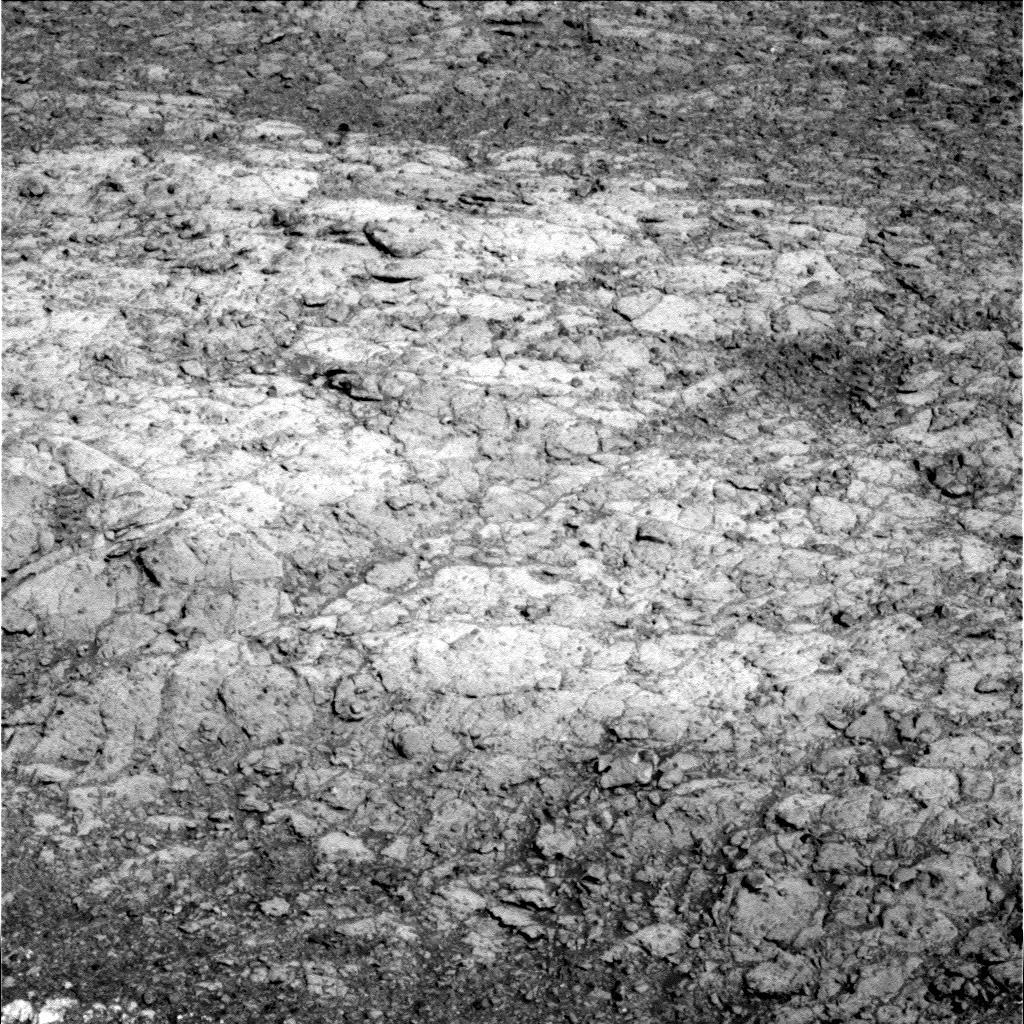
Pierre Pinaut
From Opportunity’s visual documentation of the new site along the southern wall of Marathon Valley, the MER team chose an outcrop they named in honor of Pierre Pinaut, one of the boatmen on the Lewis & Clark Expedition. There, they selected three possible targets for a complete in-depth study, finally commanding the rover ‘dig’ in to Pierre Pinaut-3. The rover took this image with her Panoramic Camera (Pancam) on Sol 4343 (Apr. 11, 12016).NASA / JPL-Caltech
The tiger team is looking first at a particular circuit board that controls most of the camera electronics and which and in particular at a pair of FPGAs – field programmable gate arrays – electronic circuits that can be programmed after manufacture and are commonly used to create little systems of logic.
“This particular pair of FPGAs – one is for left eye and one for right eye of the camera – are essentially identical in their programming,” Nelson said. It may be there is something wrong with the FPGAs, or not. “We're waiting to see what the tiger team can determine,” he said. “They are trying to gather more data on what's failing when, and whether or not these events are temperature dependent or time of day dependent somehow. There are a lot of different things that we still have to investigate.”
In addition, the MER software engineers are preparing a flight software update looking at what kind of telemetry they might be able to install that would help them better understand what's going on, on the spacecraft, Nelson informed.
Interestingly – and here’s where the problem plot may thicken – the circuit board under analysis right now also controls the rover’s flash memory. In fact, it is referred to as the camera/NVM (for non-volatile memory) board.
Opportunity’s flash drive in 2014 began suffering from numerous unplanned computer reboots and “amnesia” events, where the robot fails to mount the memory drive or copy data onto the drive before powering down. The cause of these issues was traced to what was believed to be a corrupted sector, called bank 7. However, even after bank 7 was masked off in a flight software update back in March 2015, the problems with flash continued.
“We've been looking at the flash software and reading out the memory,” Nelson said. “If we treat flash as just ordinary memory, we can read it out, and that seems to be working fine. We've never had a problem reading it out. But if we try to configure it as a flash drive, non-volatile memory, then that requires a whole bunch of software, and it seems to have problems. And when the rover tries to mount the flash drive, it has problems. So we don't really understand what's going on. We don't really know yet if it's a flight software problem or an electronics problem.”
The MER ops team has solved the flash problem for now by just working around it, having the rover use RAM memory to store her data and downlinking it each sol before she goes to sleep. “It places some constraints on us, but it's working out and we've got a mission,” said Nelson. But the camera hang-ups may well end up shedding new light on the old flash problems.
Turns out, the mission may still be able to get some use out of flash. Nelson theorized that if they read out the entire flash, and then took that data and put it in the test-bed at JPL, and have the test-bed system reconfigure the data as a flash drive, they could read out the information that was originally on the rover.
Overhead view of Marathon Valley
The HiRISE camera onboard the Mars Reconnaissance Orbiter took this overhead image of Marathon Valley. In the lower left corner Spirit of St. Louis Crater is visible. The valley stretches west to east (left to right in image) about 330 meters (1100 feet) into the 22-kilometer (13.7-mile) diameter Endeavour Crater (to the right and off image).NASA / JPL-Caltech / University of Arizona
“Ground testing has now shown that installing a full six-bank memory image allows recovery of existing files,” he said. “So data that is currently trapped in the rover’s flash file system on Mars can be recovered on Earth. What remains to be shown is, when new files are added on the rover, whether they can be identified and returned to Earth for processing without needing to read out the entire flash memory again.”
There’s a hitch though. It will take time to complete the read-outs of the flash memory. “We've only finished [reading out] one of seven banks,” said Callas. “And the thing is, you need more than one bank to try and reconstruct anything, and you may need all seven banks. We're a long way from that.”
As April began to wind down, Opportunity took more Pancam panoramas of a second CRISM area, and conducted a second APXS integration of Pinaut-3 on Sol 4355 (April 24, 2016), and then spent Sol 4356 (April 25, 2016) again focusing her cameras on the CRISM area.
The following sol, 4357 (April 26, 2016), the rover used her RAT to brush Pinaut-3, and then placed her APXS down on the target for more chemical analysis. Opportunity spent the next two sols, 4358 and 4359 (April 27 and 28, 2016) taking more images of the CRISM area, and another APXS integration on the freshly brushed Pinaut-3.
On Sol 4360 (April 29, 2016), Opportunity took some Pancam color pictures and completed an APXS measurement on the target, used her RAT to brush clean the surface of the rock and placed the APXS back down again on the target spot. That same sol, another imaging command hung and was not executed, but was cleared in the post sequence cleanup.
The robot field geologist finished the month on Sol 4361 (April 30, 2016), by moving her IDD out of the way to allow the Pancam a clear imaging the brushed surface. “There are little tiny rock pieces in the area and we’re curious as to whether the brushing brushed them out of the way, because they could jam RAT bit,” said Nelson. It appeared they did, and the team scheduled a grind into Pinaut-3 for early May.
As it stands now, the science so far shows that Pierre Pinaut is an impact breccia, typical of what the MER team is seeing in Marathon Valley. “But it’s in the red pixel area, where CRISM detects a strong smectite signature,” said Arvidson.
“It looks to me, and this is my personal opinion, that the reason we’re seeing such strong smectite signatures here is because we’re on southern wall of Marathon Valley, tilted a little bit, and it seems to be relatively clean of soil cover,” he suggested. “So it may be the fact that it’s cleaned by wind of loose debris. When we’re finished here in the red pixel or CRISM areas, we’ll know enough to combine these findings with other measurements we need to figure out what’s going on.”

The RAT that rocks
The Rock Abrasion Tool (RAT), at the end of the rover’s robotic arm (shown here just above the right front wheel) was the first instrument ever to gain access to the interior of rocks on Mars. Designed, developed, and operated by Honeybee Robotics as a part of the MERs science payload, the RAT is a space drill that uses grinding wheels of diamond dust and resin to abrade the surface of Martian rocks. To date, Opportunity’s RAT remains fully operational more than 12 years after the rover landed.NASA / JPL-Caltech
Given Opportunity’s efforts in April, it would seem then that the smectites are part of ground, terrain. “They have to be,” Arvidson opined. “Most likely carried by the flat polygonal breccias, because the red stones are so small, they couldn’t possibly be what’s carrying the signature.”
That implies is that these iron magnesium smectites were formed without a lot of water leeching the rock, and so the iso-chemical or constant composition comes about under relatively low water to rock ratios. “Everything we’re finding suggests that smectite generation here didn’t leech the rocks very much, so they still have a basaltic composition,” Arvidson said. “That indicates a relatively low water to rock ratio.”
“What's interesting,” Arvidson continued, “is that Mawrth Vallis – one of the original candidate landings sites for Curiosity and now a candidate site for future missions – has a huge amount of magnesium sulfates exposed and is sort of the poster child for alteration of the old crust. Yet the bandwidths from Marathon Valley are as deep as those we see in Mawrth Vallis.”
So the hypothesis emerging is that production of these smectites that planetary scientists are seeing in the older terrain all over Mars was probably associated with a low amount water. “We didn’t have pools of water coming through this system,” said Arvidson.
The water that once was here at Marathon Valley might have trickled down from the top of Endeavour’s rim or up from the bottom, depending on the conditions. “When the impact (that created Endeavour) occurred, there was probably ice and water in the crust and it would have set up a really hot system – hot springs, hot water moving through cracks, diffusing into the bedrock proper,” Arvidson said. “But not a whole lot of water, except along the cracks and fractures, where we see the red stuff that's been leeched. If you've got a lot of water flowing through the cracks, then it will kind of diffuse into the bedrock and do a little bit of alteration.”
That's what the MER scientists saw at Cape York within Matijevic Formation. “And that's what I think we're seeing at Marathon Valley, but in the breccias,” said Arvidson. “Opportunity is on the top of the rim right now, so a little bit of water would have gotten up there.”
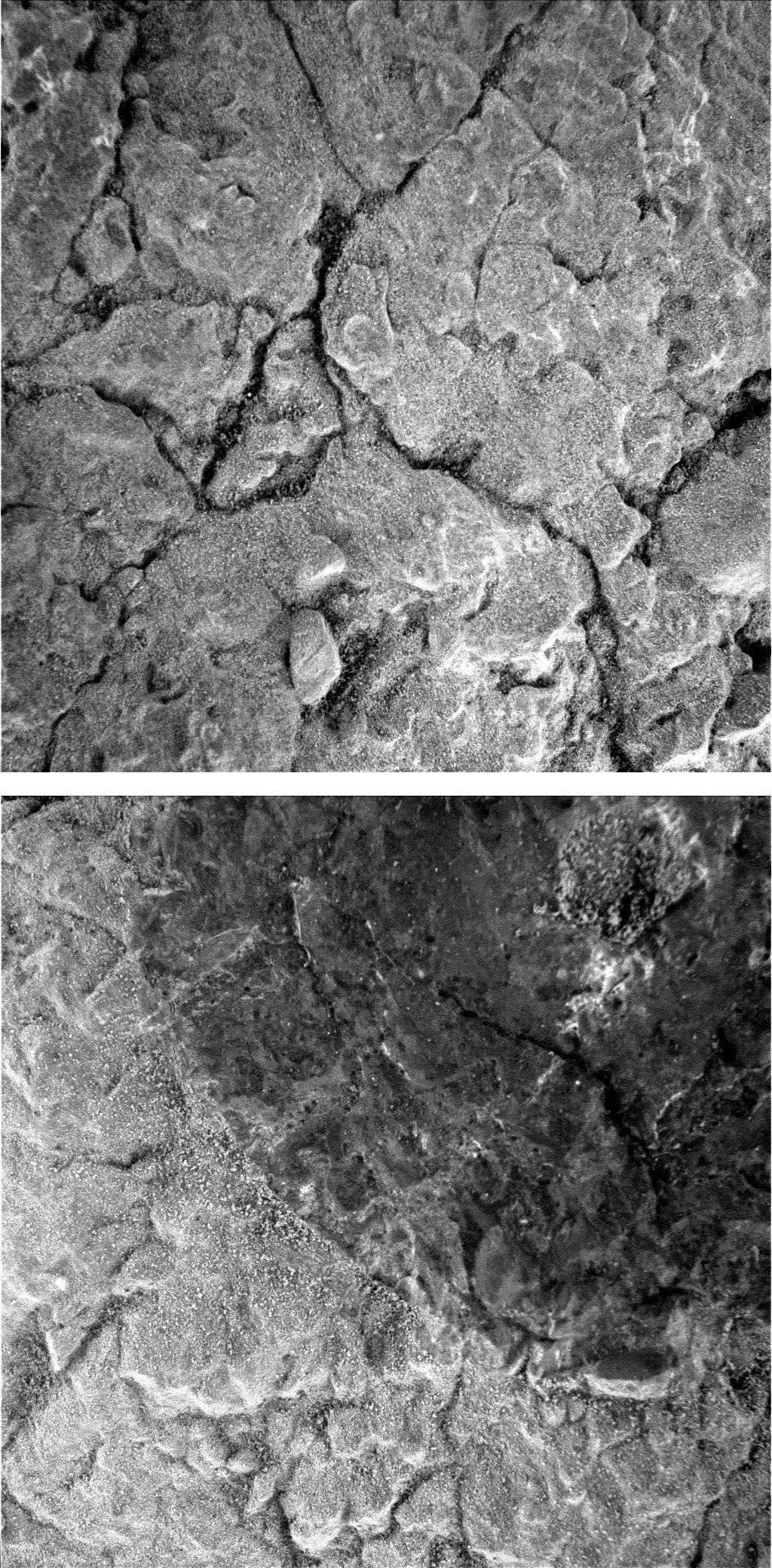
Pinaut-3
Opportunity took the raw pictures above with her Microscopic Imager (MI) before and after brushing the Pierre Pinaut-3 target with her Rock Abrasion Tool (RAT) during the last week in April 2016. “Pierre Pinaut is an impact breccia, typical of what we’re seeing in Marathon Valley,” said MER Deputy Principal Investigator Ray Arvidson. “But it’s in the red pixel area, where CRISM detects a strong smectite signature.”NASA / JPL-Caltech
Time and more work will tell more of the water story at Endeavour.
For now, Opportunity’s power levels continue to hover around 615 watt-hours and the rover seems as ready as ever for whatever comes next.
The Tau rose a little, to 0.541, as April shuttered, likely because of an ice cloud over Meridiani. “Remember, when we make a Tau measurement, all we get is a momentary measurement of atmospheric opacity and whatever is between the Sun and us can skew that measurement,” said Squyres. “It’s no big deal, but it does happen and ice clouds are common in the equatorial regions, particularly during winter and early spring.” The rover’s solar array dust factor was still strong at 0.764 and total odometry was 42.78 kilometers (26.58 miles), more than a marathon.
“When you look at how Opportunity has been performing, 12 years, going on 13 years, an extremely long time for a mission subjected to this Martian environment, we are doing extremely well,” summed up Nelson. “We have had surprisingly few failures and most we have been able to just work around. So we still have an incredibly valuable asset exploring Mars.”
As the veteran rover heads into May and the Martian winter begins to succumb to spring, the MER mission is looking at a remarkably bright future. “The key here is that thing is Mars keeps giving us new stuff to do,” said Squyres. “You know, we look down the road and keep finding things we've never seen before. That's what makes this interesting and challenging. We get to push the vehicle and push the team. We get to work to try and expand the envelope of what vehicles like this rover can do in this kind of terrain.”
On Earth however, MER ops team members are bracing for the budget bite to come. Even with a two-year extension, the ops budget will be cut. “That [is something that] has been true ever since we started extended missions on this project 12 years ago,” Callas pointed out. “It means we will have to deal with less and it's disappointing for the team, and it is reality. But there is still a lot of life left in this rover and we want to explore as much as we can while we have it,” he said. “And even at a lower level of funding, it is a privilege to operate this vehicle for the nation on the surface of another world.”
From the beginning MER has been a science-driven mission and the ops team members, who have never stopped looking around the bend or the next crater on this first overland expedition of Mars, are roving on. “To me,” Squyres said, “the exciting thing is what lies ahead.”
Given the team’s desire to find more Matijevic Formation strata and more signs of past water, it would seem logical and has been previously discussed that during the next two years Opportunity would drive down the steeper slopes at Cape Tribulation, visit Cape Byron, and at some point venture into the interior of Endeavour, among other things.
Squyres held the mission two-year extension proposal, and the adventure it lays out, close. “The plan that we’ve got going forward for the next two years is going to be some of the most exciting stuff we’ve ever done with Opportunity,” he assured. “We have some stuff in this next plan that no rover has ever done before.”

NASA / JPL-Caltech / Cornell / S. Atkinson
Endeavour at twilight
Although the base image above is real, taken by Opportunity several years ago, author, MER poet, and astronomy outreach educator, Stuart Atkinson worked some of his illustrative magic and rendered this imagined view of Endeavour at twilight. For more of Atkinson’s artful image processing and musings on Opportunity, see his blog: The Road to Endeavour.Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate