
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Spirit Homes in on Winter Site as Opportunity Examines Victoria's Ring

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
October 31, 2007
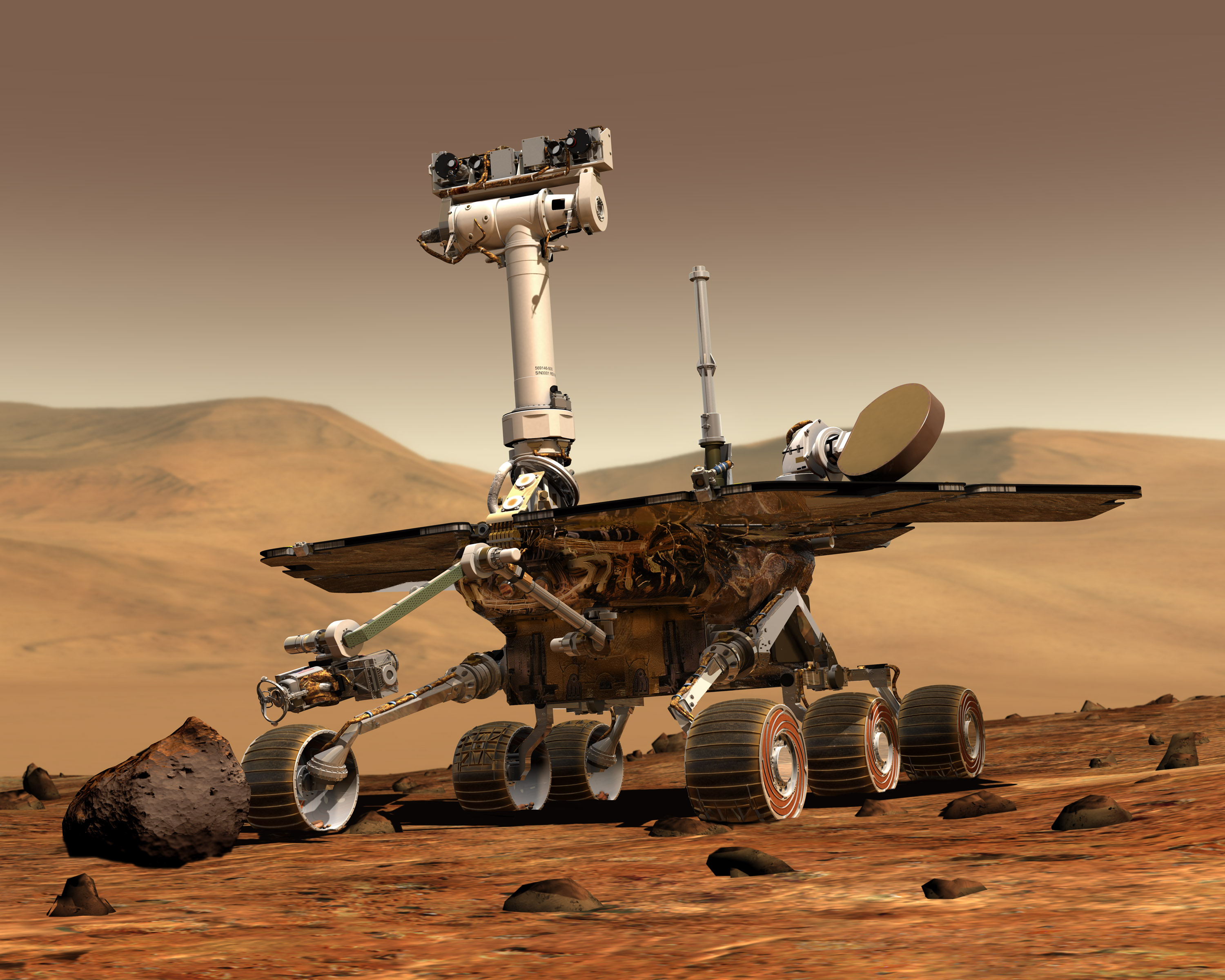 Mars Exploration Rover
Mars Exploration RoverCredit: NASA / JPL / Maas Digital
The Mars Exploration Rovers (MER) logged another major milestone in October as they completed a second Martian year of field geology and now may rove on through 2009.
Spirit marked the occasion at Gusev Crater October 8 while roving around the southern edge of the top of Home Plate and Opportunity crossed the threshold earlier this week as it investigated the rock ring that circles the inside of Victoria Crater at Meridiani Planum. In between the robot field geologists' 2nd Martian birthdays, NASA headquarters granted the MER mission its fifth extension, assuring the support needed for the twins to continue their work for another two Earth years.
A Martian year -- the amount of time it takes for the planet to complete one orbit around the Sun -- lasts for 687 Earth days, so two Martian years is equivalent to about three years and 9 months on Earth. Therefore, in a way, the rovers' 2nd Martian birthday is actually a kind of prelude to their 4th Earth birthday, coming up in January 2008.
Since landing on Mars in January 2004, Spirit and Opportunity have not only succeeded in their prime objective of finding evidence of past water and an environment that could have been suitable for sustaining at least microbial life, but have chalked up one "first" after another in the annals of planetary exploration, rewriting all the books on Mars, blazing new extraterrestrial trails, and setting the standard for all other rovers to follow.
Spirit and Opportunity are the first rovers, for example, to climb a Martian hill, find meteorites on another planet, venture into craters, grind into rocks, conduct collaborative experiments with spacecraft orbiting above, drive miles across the surface, and, most recently, survive a life-threatening global dust storm for which they were not designed.
While future rovers -- the next being Mars Science Laboratory (MSL), slated for launch in 2009 -- will no doubt easily surpass their achievements, Spirit and Opportunity will always be viewed as pioneers. Indeed, Sojourner in 1997 was the first rover to demonstrate mobility, but it only got 30 feet from the lander, because it was "tethered" by radiolink. Spirit and Opportunity, however, were designed to emulate real geologists and as such are equipped with "backpacks" that enable them to venture far and wide from their landing sites, those panoramic camera (Pancam) "eyes" that view the surroundings much like humans would, and super-human capabilities, like being able to detect minerals in rocks from a distance and see in the infrared.
Throughout their travels, the rovers have together returned nearly 200,000 images that have taken us vicariously on their adventures around Gusev and Meridiani Planum, giving everyone with a web browser a real sense of this somehow familiar but alien landscape, as well as the first glimpse from the ground of the legendary Martian dust devils forming and moving. As the twin rovers have moved out across the landscapes, they have taken all of humanity on its first overland expedition across another planet.
All that is why, no doubt, "the biggest and most difficult strategic decision ever made on Spirit" has for the last couple of weeks "consumed" Steve Squyres, of Cornell University, principal investigator for rover science, and other MER-A team members.

Home Plate South Panorama
Spirit took this approximate true color panorama between Sols 1325-1332 (Sep.25-Oct. 2, 2007). It acquired the image, which covers 360 degrees of terrain around the rover, with its Pancam, using three filters, admitting light with wavelengths centered at 753 nanometers (near infrared), 535 nanometers (green) and 432 nanometers (violet). The Pancam team, led by Jim Bell of Cornell University, has worked to eliminateimage-to-image seams from the sky portion to better simulate the vista a person standing on Mars would see. Credit: NASA /JPL-Caltech / Cornell
The spotlight in recent months had been shining mostly on Opportunity. It had taken the brunt of the global dust storm in June and July making for weeks of nail-biting drama. Like any good action-adventure movie script would have played it out, the rover survived and reached its once "impossible dream" target, Victoria Crater. Approximately 800 meters (half a mile) wide and 70 meters (230 feet) deep, Victoria is the largest crater the rover has visited and the one that promises to take the team back to an earlier time when Mars may have been warmer and wetter so, not surprisingly, Opportunity's achievement has caused a lot of excitement among the team and in the media. But during the last couple of weeks, as Opportunity got to work inside the big crater and as ghosts and goblins prepared to go on the haunt on Earth, the spotlight on Mars turned back onto Spirit.
 Opportunity's Sun
Opportunity's SunSeveral times a sol, the MERs take images of the Sun (using a very dark solar filter) to determine the opacity of the atmosphere or "tau". Here, images taken since Sol 1200 of Opportunity's mission have been calibrated to show how dim the Sun appeared during the dust storm. Wherever a circle with an "X" appears (i.e., Sols 1236-1242, July 16-22, 2007), the skies were so dark that the rover couldn't muster the power to perform.Credit: NASA / JPL / Cornell / animation by E. Lakdawalla
The fallout from the big summer storm has continued to rain dust on both rovers' solar arrays. While Spirit did benefit from a small gust of wind this month, the rover's average energy levels of about 345 watt-hours are about half of Opportunity's current 600+ watt-hours. Always the "lucky" rover, Opportunity has been reinvigorated on numerous occasions in the last two months as Martian winds have blown in and around Victoria, effectively clearing off much of the accumulated dust on its arrays and giving it considerable boosts in energy.
With the fallout continuing -- and Spirit's non-functioning right front wheel inhibiting its pace -- finding a winter haven became suddenly urgent in October. Before the rover could complete its transect across the top of Home Plate this month, the MER team aborted the plan and redirected Spirit to scope out places to take shelter come March 2008 when the Martian winter begins in the southern hemisphere of the planet.
"We need to find a winter haven with a slope of approximately 20-25 degrees, 10-15 degrees more than last year," said Ray Arvidson, of Washington University, deputy principal investigator for rover science, in an interview earlier this week. "Unless some winds come on and blow some of this dust off Spirit's solar panels, we're going to need to get to a steep slope sooner rather than later."
The fact that Spirit is even in this situation is something to note. Because of its location on the planet, the team never really expected MER-A to even survive its first Martian winter. But by being able to rove and by reaching the Columbia Hills, Spirit was able to position itself on a slope in May 2004 where its solar arrays could be angled toward the Sun to maximize exposure to its lifefuel and it seemed to survive its first Martian winter with ease. Just before the rovers' second Martian winter (April 2006-November 2006), however, Spirit lost the use of its right front wheel when an actuator (motor) went bad. The MER team had to cancel plans for the rover to follow its dramatic climb to the top of Husband Hill with a hike up McCool Hill. Instead, they were forced to direct Spirit to drive backwards, dragging its lame wheel, to Low Ridge where it perched itself on a 10-degree slope and settled in for nearly seven months, conducting a very intensive and, as it turns out, highly successful winter science campaign.
 Spirit's Sun
Spirit's SunThis animation shows Sun images taken since Sol 1220 of Spirit's mission that have been calibrated to show how dim it appeared to this rover during the dust storm. Wherever a circle with an "X" appears, (i.e., Sols 1263-1265, July 23-25, 2007), the skies were so dark that the rover didn't have the energy to work.Credit: NASA / JPL / Cornell / animation by E. Lakdawalla
Now, the ever-accumulating dust on Spirit's solar panels has made power predictions for the coming winter even worse than those it experienced during the last Martian winter, so the MER team has spent the last couple of weeks reviewing Pancam images of potential havens and grappling with the decision of where to send the rover for the coming winter.
The science team has had its collective site set on a couple of scientifically tantalizing formations approximately 120 meters (390 feet) to the south of Home Plate called von Braun, a hill, and Goddard, a kind of oval-shaped depression or pit with a raised rim. But there has been a lot of discussion among the engineers and scientists about whether Spirit, driving backward as it now must most of the time, could make the journey south over unknown terrain in time, whether there is a place, just in case, to bail out along the way, or whether they should play it safe and have Spirit hunker down close by.
"It's a risk versus benefit trade," Squyres said Wednesday, Halloween, in an interview just before the decision was made. "The benefit is we want to get to von Braun and Goddard, so we want to spend the winter as close to those places as possible. Preferably we'd like to spend the winter there, but there are various risks associated with the places one might spend the winter and we want to make a wise decision. We want to get to Goddard and von Braun and do good science there, but we can't do that unless the rover survives the winter." And survival is the most important factor.
As October was coming to a close, the candidate sites were checked off one by one in the Spirit Science Operations Working Group (SOWG) meetings. In the end, the team eliminated von Braun and Goddard, because they couldn't find a slope in the area steep enough. They also eliminated a hill to the west of Home Plate called Tsiolkovski, after Konstantin Tsiolkovsky, the Russian visionary and pioneer of astronautics who theorized many aspects of space travel and rocket propulsion.
Ultimately, it came down to two choices: the north-facing edge of Home Plate or a place they call South Promontory, which, though located on the southern side of Home Plate, features "a little northward promontory that juts out," as Squyres put it, and appears to be the safest location. Here's the rub: it's in the exact opposite direction, 180-degrees, from von Braun, and back on the north side of Home Plate.
 Home Plate from above
Home Plate from aboveThis image from the Mars Reconnaissance Orbiter's High Resolution Imaging Science Experiment (HiRISE)camera shows the area in the Inner Basin of the Columbia Hills that Spirit is currently roving around.
Credit: NASA / JPL / Cornell
Update: At a meeting held 8 a.m., November 1, the team made its decision. Spirit will head north across Home Plate, drive a little way down the north facing edge, and winter there. "It was a pretty simple decision when it came down to it," said Squyres. If we head to Home Plate North, we wind up being about 10 drive sols farther from our goal, von Braun. We also wind up being on a steeper northward slope that buys us an additional 10 watt-hours. So it's a simple, straightforward trade of 10 watt-hours for 10 drive sols. There are lots and lots of other factors that go into this decision, but you boil it all down and it really comes down to that." Although the Martian winter isn't expected to begin until March or April 2008, the team is taking no chances and plans to have Spirit in position at what is now being called Home Plate North by January 1, 2008.
In the midst of the ruminations about where Spirit will winter, a team of physicists at the University of Guelph in Canada, announced findings that added to the luster of the spotlight currently on Spirit. Using a new technique with the alpha particle X-ray spectrometer (APXS) from the Max Planck Institute in Mainz, Germany, the group – which includes Ralf Gellert, the lead scientist and co-developer of the instrument, and colleagues Iain Campbell and Joanne O'Meara -- determined the actual amount of water that appears to be contained in some of the bright, light-toned sulfur-rich soils that Spirit has churned up with its wheels, deducing that these sulfur-rich samples contain up to 16 percent water. Even with the stated error margin of +- (plus or minus) 5 percent, that is a significant amount water to be bound to the molecules that make up these mineral compounds.
The physicists analyzed four samples that Spirit checked out with the German-made spectrometer -- two from Paso Robles (circa Sol 400) and two from the DeadSea (circa Sol 720). The APXS detects alpha particles and X-rays emitted by rocks and soils and uses these measurements to detect the amount of each chemical element they contain. Its data complement the detection of mineral composition by the miniature thermal emission spectrometer (Mini-TES) and the iron-detecting Mössbauer spectrometer, helping scientists determine the origin and history of rocks and soils. In fact, Spirit's Mini-TES had previously directly measured bound water in Paso Robles and Dead Sea.
"What is new is that we can quantify this total amount of bound water," said Gellert, who helped develop the APXS while at the Max Planck Institute. Using a computer program developed by Campbell's group that allows them to match theoretical predictions of data patterns against actual patterns measured by the APXS, the physicists found an excess of oxygen in Spirit's data or, in other words, "a large disagreement between simulation and experiment," as Gellert put it in an email interview this last weekend.
 Paso Robles
Paso RoblesA team of physicists from the University of Guelph in Ontario, Canada, are reporting that in their analysis of alpha particle X-ray spectrometer (APXS)data Spirit collected from two samples of Paso Robles appear to be made up of 16% water, with an error margin of 5%. Spirit took this image of Paso Robles on Sol 399 (Feb. 15, 2005) with its panoramic camera (Pancam). Credit: NASA /JPL-Caltech / Cornell
"With the APXS one can measure characteristic X-rays of elements heavier than sodium (~ Na)," Gellert explained. "We can't measure oxygen with X-ray spectroscopy, but the oxygen can be attributed to each detected element in the typical geological oxidation state of this element – for example, Si is Si02, and so on. Usually we would not be able to distinguish between metallic iron (Fe0+) and hematite (Fe2O3 ), for example, or to see invisible components like water (H20). We therefore report our APXS results always as assumed water -- and carbonate-free -- which is usually the case for Mars." Given the disagreement between the computer simulations and experiments, Gellert explained, "[o]ne can then put hypothetical water in the APXS composition -- it's actually only the oxygen that counts, hydrogen is still invisible -- and see at which H20 levels the simulation and the experiment agree. This is the way the up to ~ 16 +- 5% water was determined."
There are "quite a few caveats" in this new APXS method, Gellert continued, "and we went into details in the paper to discuss and discard them." For example, what they assume to be bound water could be also carbonate. "But no mineralogy instrument has yet detected significant amounts of carbonate on Mars. So one can exclude this, especially beside this high sulfate content," he pointed out. "By far, [the] most plausible explanation [is] that the excess oxygen is indeed bound water," summed up Gellert. The team's paper is to be published this spring or winter, he said, in the Journal of Geophysical Research: Planets.
The work at the University of Guelph marks the first time that samples from the ground show significant water amounts, in excess of the amounts detected from orbiters around the equator. "Goethite and jarosite, the minerals detected on Mars so far containing water, [feature] only a few percentages of water in each sample," pointed out Gellert, who is currently principal investigator for an international group of scientists developing a new APXS for NASA's next rover. “Finding [such] samples with the rovers in an otherwise dry and arid environment helps us to understand what happened to the water in the Martian past," added Gellert, who noted the team plans to conduct more analyses from the rovers' APXS data.
 DeadSea
DeadSeaA team of physicists from the University of Guelph in Ontario, Canada, are reporting that in their analysis of alpha particle X-ray spectrometer (APXS) data Spirit collected from two samples of Paso Robles appear to be made up of 16% water, with an error margin of 5%. Spirit took this image of DeadSea on Sol 721 (Jan. 12, 2006) with its panoramic camera (Pancam).Credit: NASA /JPL-Caltech / Cornell
What happened to the water on Mars is, of course, what everyone in the Mars planetary community has been trying to figure out and why NASA instituted a "Follow the Water" strategy in its Mars Exploration Program.
Meanwhile, on the other side of the planet, Opportunity got deep into its examination of the tri-layered, light-toned rock that rings the inside of Victoria Crater. The rover spent much of October focusing on the unusually textured top layer, dubbed Steno, after the renowned physician-anatomist-geologist Nicholas Steno (1638-1686). It was Steno who first described the organic origin of fossils and fundamental principles of stratigraphy, detailing the fossilization of organic remains in layers of sediment in his most important book, De Solido Intra Solidium Naturaliter Contento Dissertationis Prodromus (Forerunner of a Dissertation on a Solid Naturally Contained within a Solid), often simply called the Prodromus, published in 1669.
There had been some concern about the rover's ability to use its instrument deployment device (IDD) on the 25-degree slope on which it is positioned, Opportunity, true to the MER form, has deftly handled it all. "Actually, the mobility has been very predictable so far and we've been able to get the rover pretty much where we planned," reported Bruce Banerdt, MER project scientist at the Jet Propulsion Laboratory (JPL), where the rovers were designed and are being managed. "On Steno we weren't quite able to reach the most desired place, but from the place we got to the rover took a really good IDD measurement in this layer."
By mid-October, Opportunity had completed its in-depth investigation of Steno and moved further down the slope in Victoria Crater to the second layer target, named Smith, in honor of British geologist William Smith (1769-1839), the first scientist to apply the principles of stratigraphy on a large scale in the 1790s and early 1800s. Known as the Father of English Geology, Smith created the first geologic map of England, and first recognized the significance of strata or rock layering, and the importance of fossil markers for correlating strata. The rover was still at work on Smith as All Hallow's Eve descended on the Earth.
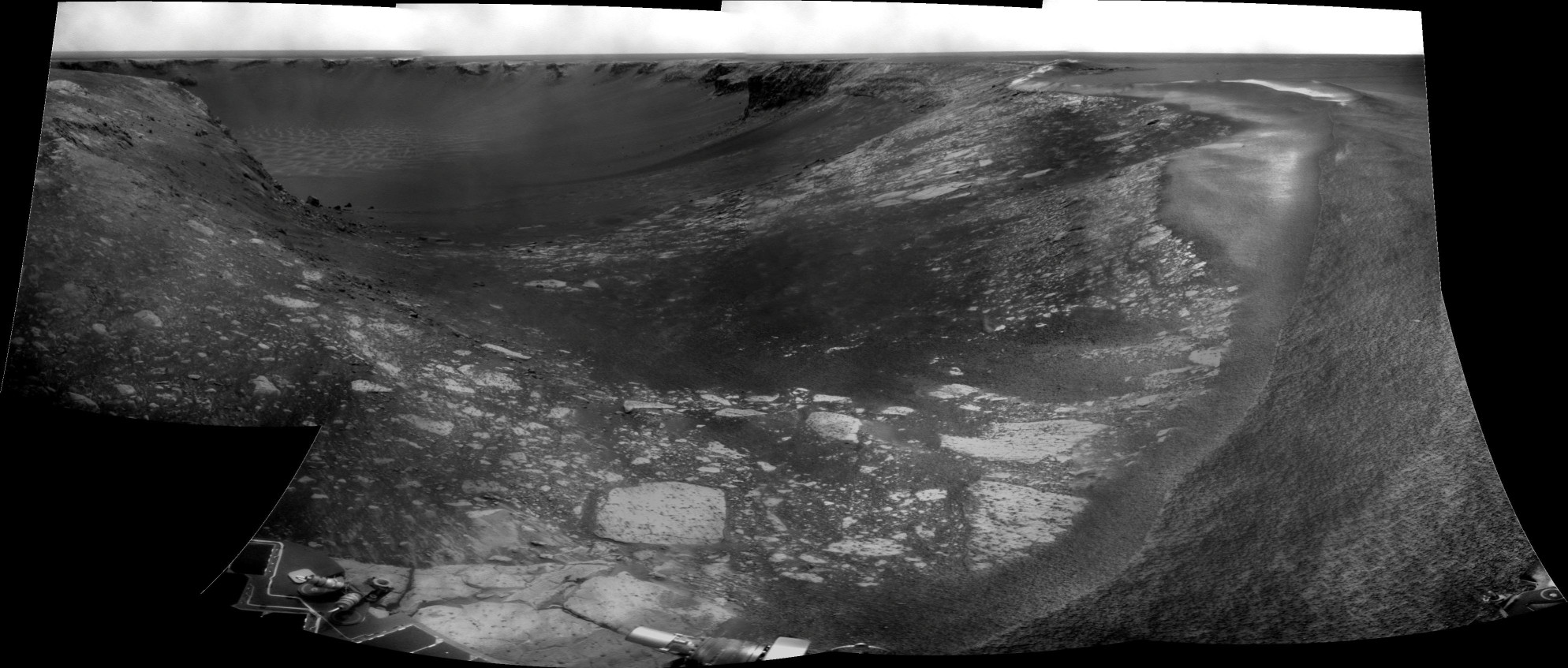
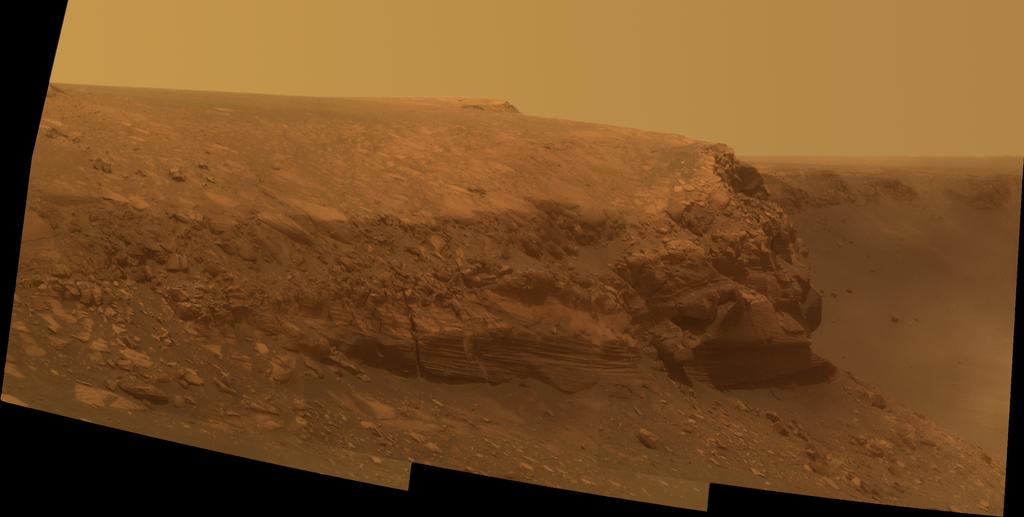 Cape Verde from inside looking out
Cape Verde from inside looking outOpportunity took this image of Cape Verde with its Pancam on Sol 1329 (Oct. 20, 2007), more than a month after it began descending down the crater walls and just 9 sols shy of its second Martian birthday on Sol 1338 (Oct. 29, 2007). This view was taken using three Pancam filters, admitting light with wavelengths centered at 750 nanometers (near infrared), 530 nanometers (green) and 430 nanometers (violet). The overall soft quality of the image and the "haze" seen in the lower right portion are the result of scattered light from dust on the front sapphire window of the rover's camera. "We've done the best we can to 'clean' it up using new calibration data, but still, there's dust on the front windows and the image quality is definitely different than it was before," said Jim Bell, Pancam lead. "Let's hope for some good wind gusts to clean off the optics!"Credit: NASA /JPL-Caltech / Cornell
Until recent weeks, all instruments on both rovers had been operating. In October, however, the Mini-TES on both Spirit and on Opportunity were turned off. "It's been getting progressively more difficult for the team to get the spectral features in the data coming down from the instrument on Spirit," said Banerdt. "We think perhaps it's getting dust in its optics, so we've stopped using it for now and closed up optics. The Mini-TES on Opportunity hasn't been giving any useable data at all since the beginning of the dust storm and so it's now in hibernation as well while [the instrument team members] at Arizona State University (ASU) are working on the problem to see if there's anything that can be done to improve it."
Although many science team members predicted that the harsh, fluctuating temperatures on Mars would be what did in the sensitive spectrometers, it turns out the Martian dust was more threatening. "We suffered significant dust contamination during this recent global dust storm on both Spirit and Opportunity," confirmed Steve Ruff, of ASU, payload downlink lead on Mini-TES.
The rovers have been using the Mini-TES, which "sees" infrared radiation emitted by objects, to record the thermal spectra of various rocks, soils, and terrain in order to determine the types and amounts of minerals they contain. (All warm objects emit heat, but different objects emit heat differently and those differences provide signatures of sorts by which scientists can identify them.) Located at the bottom of the rover's mast, the Mini-TES zeroes in on its targets by looking up through the Pancam mast – equivalent to a periscope – to mirrors at the top that point the field of view. Now apparently one or more of those mirrors are coated with dust from the storms.
"On Opportunity's, we can't see any evidence of light coming through the dusty mirror optics and can't tell the difference between the sky and ground," Ruff said. "It's pretty extreme." The dust on the Mini-TES mirror on Spirit is not as bad. We're probably down to about 20% transmission of light through that instrument." Still, that is significant, like looking through "really dusty glasses," as Ruff put it, and not really adequate enough to get good data.
"We can still make out features in the atmosphere -- carbon dioxide (CO2) and dust in the atmosphere have very strong absorption features -- so we can still see those kinds of features pretty well even with this obscuration. The spectral features of surface materials, which are already much more muted compared to the sky, however, are really compromised with this dust," Ruff expounded. "Right now, we're dominated by the spectral character of the dust on the mirror."
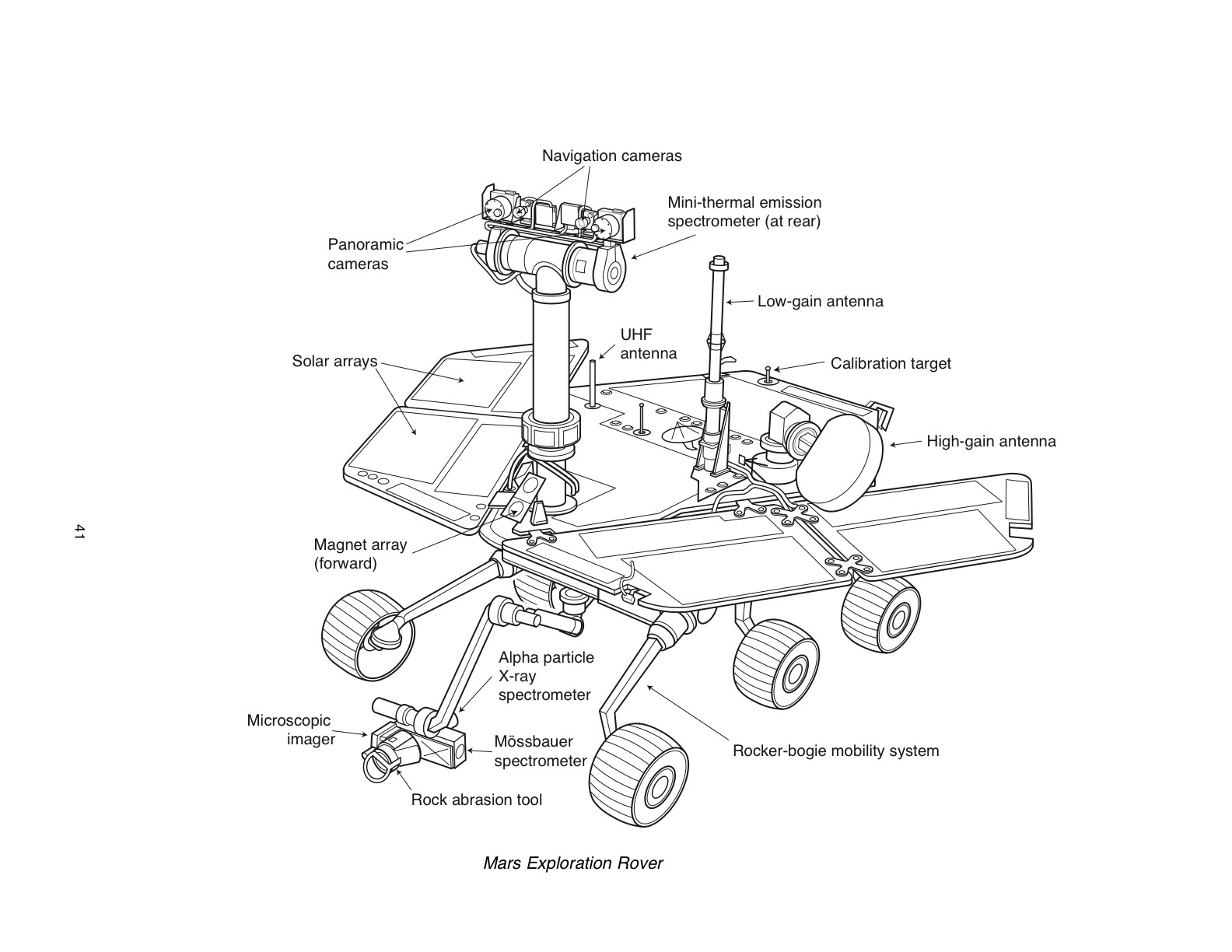 MER
MERThis diagram shows the basic layout of the Mars Exploration Rovers' suite of scientific instruments. Credit: NASA /JPL-Caltech / Cornell
Ruff and the Mini-TES team members at ASU continue to work the problem and are considering their limited options, including driving the mirror's motor in such a way to agitate it or bump it in hope of knocking off some of the dust or doing some wind tunnel testing to see if there's an ideal orientation that would help take advantage of any passing Martian winds. "But those are long shots," admits Ruff. Another scenario involves leaving the cover to the top mirror open and waiting for a gust. "We've never seen a cleaning event before on Mini-TES, but we also don't leave that mirror exposed for extended periods of time," he noted.
Interestingly, although the rovers' trundling around the surface vibrates the Pancam mast and mirror every time they drive, those vibrations are insufficient to move much dust. "I think that's a clue that there's not that much we can do to vibrate and agitate that mirror to relieve it of dust," Ruff said. It would also seem to imply that opening the cover and leaving the mirror exposed may be the best bet. "But that is a gamble we haven't yet signed up to," he added.
Despite the damning of the dust, at this point there is still utility in Spirit's Mini-TES, Ruff said. "We can still see and discern spectral variability in the scene and there are still variations even in the surface materials where we can at least tell differences," he explained. "Whether we can make a correction sufficient to make these data interpretable is another level of effort we need to get into. Right now, we don't want to do anything to make it worse."
Despite the inevitable signs of aging, the rovers seem to be taking their lead from the Baby Boomer Generation and are roving on, fighting it every step of the way. And, all things considered, they continue to be in generally "good health" and are conducting "great science," said John Callas, of JPL, MER project manager.
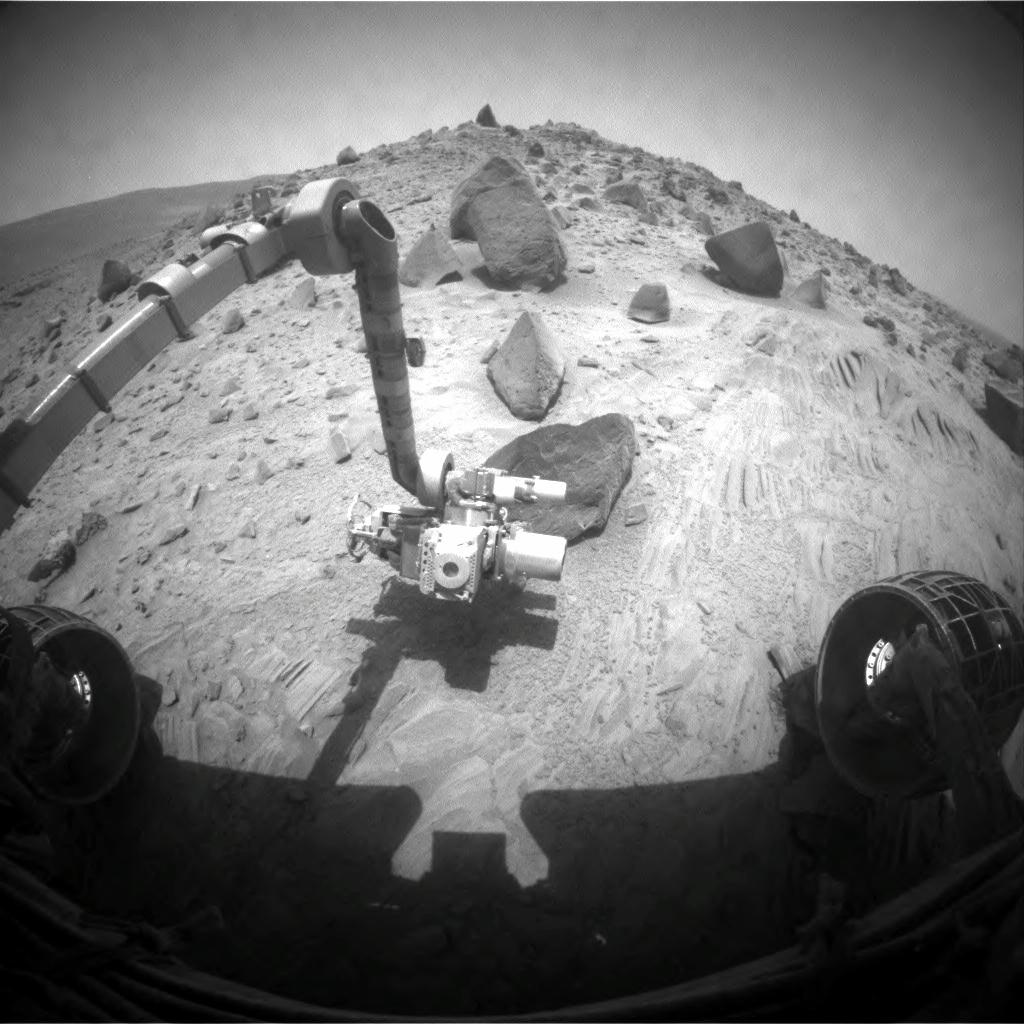
Spirit From Gusev Crater
As September turned to October, Spirit was in the midst of its transect across the top of Home Plate, the circular volcanic plateau it has been studying for some months now in the Inner Basin of the Columbia Hills inside Gusev Crater, conducting an in-depth study on the southern edge called Site 3.
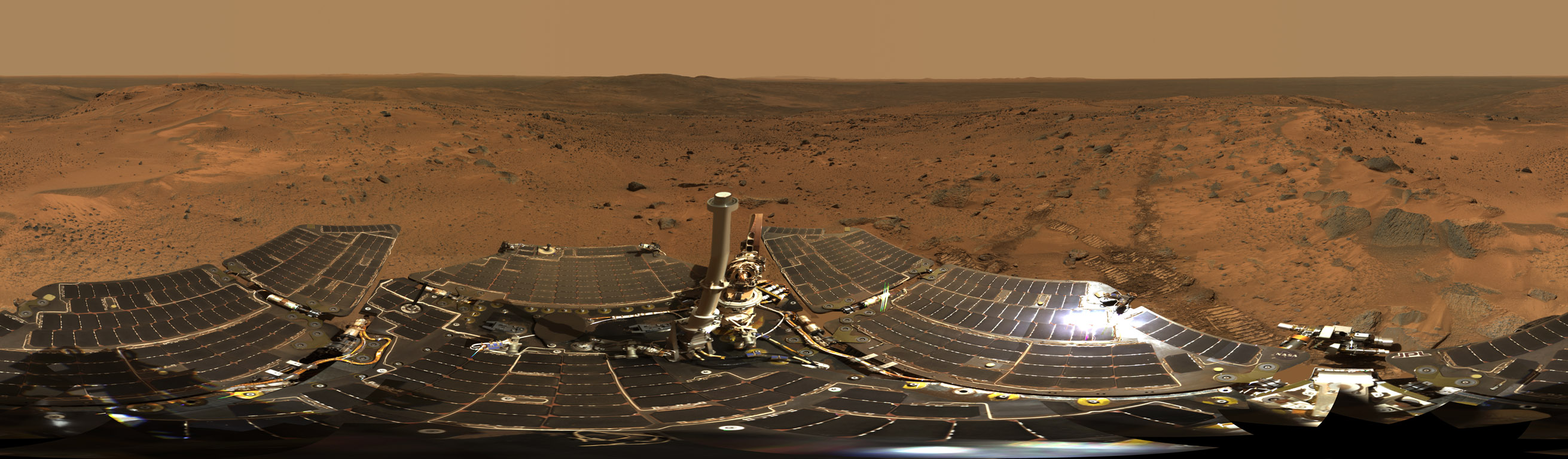
 Home Plate South Panorama
Home Plate South PanoramaSpirit acquired this panorama with the Pancam between Sols 1325 - 1332 (Sep. 25 - Oct. 2, 2007). This false color rendering uses the same filters as used in the panorama shown above, but is presented in a way dramatically different from "true color" in order to enhance the many striking, but subtle, color differences between rocks, soils, hills, and plains in the scene. The Pancam team, led by Jim Bell of Cornell University, has worked to eliminateimage-to-image seams from the sky portion to better simulate the vista a person standing on Mars would see.
Credit: NASA /JPL-Caltech / Cornell
In addition to its routine observations of the atmospheric dust levels, known as tau measurements, with the panoramic camera (Pancam) and surveying the sky and ground with the miniature thermal emission spectrometer (Mini-TES), Spirit began the month on Sol 1331 (October 1, 2007) by completing a 360-degree panorama of its surroundings from Site 3, acquiring a mosaic of images with the navigation camera and taking thumbnail images of the sky with the Pancam. During the afternoon Odyssey overpass, the rover checked out a target known as Ohridiski2 with the Mini-TES.
On the following sol, Spirit bumped backward 50 centimeters (20 inches), snapped some full-color Pancam pictures of the area it studied with the instrument deployment device (IDD) instruments at Site 3, then drove 10.1 meters (33.1 feet) toward the next target area at the southwest corner of Home Plate, known as Site 3a. It paused mid-way to take some images with the navigation camera, then acquired post-drive image mosaics with the navigation camera and the Pancam.
Martian winds blew in to clear away some dust from Spirit's solar panels on Sol 1333 (October 3, 2007), which resulted in a 1-percent increase in solar power, or about 10 watt-hours, boosting the rover's solar output for the day to 361 watt-hours. Spirit made use of the perk by surveying the horizon and completing a full-color, systematic ground survey with the Pancam.
 Spirit at 2 -- Mars years
Spirit at 2 -- Mars yearsOn Sol 1340 (Oct. 10, 2007), Spirit used its front hazard-identification camera to capture this wide-angle view of Humboldt Peak. For the rocks at this site on the southern edge of Home Plate in the Inner basin of the Columbia Hills inside Gusev Crater, the rover team decided to honor Colorado peaks higher than 14,000 feet with an add-on connection to the Colorado Rockies, the 2007 National League Champions, hence, a connection to the baseball-theme nomenclature being used for features around the geologic formation.Credit: NASA /JPL-Caltech / Cornell
After finishing a survey of rock clasts with the Pancam on the next sol, Spirit continued the drive toward Site 3a, acquiring post-drive images with the hazard avoidance and navigation cameras, then transmitting data to Mars Odyssey during the overnight pass of the orbiter. The rover wrapped up the first week of the month conducting dust monitoring activities, acquiring images with the navigation camera in support of observations with the Mini-TES, and on Sol 1337 (October 7, 2007), taking full-color Pancam pictures of a field of boulders that included some distinctive dark, angular rocks at Site 3a.
Members of the MER team decided to name boulders studied in this field after peaks in the Colorado Rockies that are taller than 14,000 feet, a link, they pointed out in their reports, to the Colorado Rockies, the National League Champions, and hence a link, however indirectly, to the baseball-theme nomenclature being used for features around Home Plate. During the final hours of that first week in October, Spirit closed in ona rock dubbed Humboldt Peak for an in-depth study.
On Sol 1338 (October 8, 2007), as the second week of October got underway, Spirit completed its second Mars year of field geology by studying Humboldt Peak and another rock in the field called Mt. Ebert with the Mini-TES, surveying a group of rock clasts, and acquiring thumbnail images of the sky with the Pancam. The following sol, it got up and roved on.
After completing work on its 360-degree panorama from Site 3, however, Spirit had more than 711 megabits of unsent data in its flash memory, 453 megabits of which were data from the Pancam. Since the rovers have no hard drive onboard for storage, they must send home the data they get not long after they get it. With the backlog from the panorama, Spirit's flash memory was now limiting its activities as the volume of memory in use edged up to more than 70 percent of capacity. Fortunately, the atmospheric dust levels continued to wane, allowing Spirit to take advantage of additional sunlight by using solar power to transmit data to Earth at night when the Odyssey orbiter passed overhead. These transmissions freed up more of its onboard computer memory.
 Mars Express
Mars ExpressArtist's conception of the European Space Agency's Mars Express
Courtesy: ESA
After calibrating the Mini-TES on Sol 1339 (October 9, 2007), Spirit conducted late-night tests with the European Space Agency's Mars Express orbiter. The European orbiter will provide backup communications during the entry, descent, and landing of the Phoenix mission, due to arrive near the north pole of Mars on the United States' Memorial Day weekend of 2008. The relays with Mars Express are an example of the value of having multiple spacecraft at Mars. By using the same UHF radio frequencies as those used by the rovers and ESA's orbiter, Phoenix will benefit from the communications links already in place. Another example is Spirit's ability to take thermal measurements looking up into the atmosphere, which serve to fill in data that cannot be collected from above by orbiters looking down, for a more complete profile of the Martian atmosphere.
On Sol 1340 (October 10, 2007), Spirit searched for morning dust devils with the navigation camera, checked for drift or changes with time in the Mini-TES, and acquired a stereo mosaic of microscopic imager pictures (MI) of Humboldt Peak. The rover also checked out a target called Crestone Needle with the Mini-TES, then placed the APXS on Humboldt Peak for an 18-hour, overnight study prior to brushing the surface, while also relaying data to Earth via the Odyssey orbiter.
The next sol, Spirit took spot images of the sky with the Pancam, looked for the composition in targets called Snowmass and Castle Peak with the Mini-TES, then brushed the surface of Humboldt Peak with the rock abrasion tool (RAT). It later positioned the APXS on the newly brushed surface and conducted a 19-hour, overnight study of the angular boulder.
Spirit looked for morning clouds with the navigation camera and checked for drift in the Mini-TES with which it then acquired data from a target known as Mt. Evans on Sol 1342 (October 12, 2007). Switching instruments, the rover then spent 23 hours collecting data from the brushed surface of Humboldt Peak with the Mössbauer spectrometer to determines its iron content.
Preliminary data from the Mini-TES indicated these basalt boulders may be compositionally related to Comanche-class rocks first encountered on Husband Hill, although according to Banerdt, they also share some of the same characteristics as Adirondack, which Spirit encountered way back at the beginning of the mission. "We did an analysis on that and got back the results and it's typical of Adirondack-type basalt although it has some elemental anomalies that make it look a little bit more like the Comanche-class rock," he said. "While both are basaltic rock, there is some discussion as to whether they may represent different points of chemical evolution of a magma or whether there's some alteration going on. It's all preliminary stuff, but so far there is nothing really unusual about them," he summed up.
 Husband Hill Summit Panorama
Husband Hill Summit PanoramaNearly a full Martian year after landing on Mars, Spirit reached the summit of Husband Hill. Spirit captured 653 images for this panorama between Sols 583 and 586 (Aug. 24 to 27, 2005). It is one of the largest panoramas shot by either rover. The full-size panorama spans 22,348 pixels in width and is available at the Planetary Photojournal.Credit: NASA / JPL / Cornell
From Humboldt Peak, Spirit headed westward along the southern edge of Home Plate toward a spot called Site 4, an overlook of sorts to the south valley that leads to the hill called von Braun and the rimmed pit called Goddard, the two geologic formations that the science team has had its collective eye on, to take a long-baseline stereo panorama. The rover drove approximately 14 meters (46 feet) to get into position for the first vantage point of the stereo imaging on Sol 1348 (October 18, 2007) and snapped the left-eye portion the panorama from Home Plate on Sol 1349.
During the ensuing two sols, the rover drove approximately 8 meters (26 feet) to the second vantage point, taking the right-eye portion of the stereo panorama on Sol 1351. "The images had to be eight meters apart to get the right stereo separation to be able to put together a terrain model," noted Banerdt. Mission accomplished. In addition, Spirit, took some pictures of its external magnets through all filters of the Pancam, then used the camera system to survey the horizon, spent 6 1/2 hours collecting measurements of atmospheric argon with the APXS, and watched for dust devils with its navigation camera.
As October wore on and dust continued to fallout, the tau dropped back down to normal levels, about .7, but the amount of dust on the solar panels increased substantially as a result. That put the rover "in a more precarious power situation than we were last winter," said Banerdt.
There is no way to move the solar panels -- "once they're deployed, they're there," as Arvidson put it -- so to be conservative, the MER team decided to abort the transect and go on the hunt for a steep slope and safe winter haven where the rover can position itself and its arrays to take in as much sunlight as possible. "We finished Site 4 and were going to go to Site 5, but when we got the new estimates of the dust loading and the decrease in power, what became clear is that we needed to figure out where to go for the winter campaign," said Arvidson. The low energy levels are compounded by the fact that Spirit's right front wheel is inactive and that makes it tough to climb slopes," he reminded.
 Home Plate South 3-D Panorama
Home Plate South 3-D PanoramaSpirit used its Pancam to record this nearly 360-degree vista, dubbed the Home Plate South panorama from late September to early October 2007. This view is a stereo anaglyph of the scene, showing it in three dimensions to viewers using red-blue stereo glasses (red lens on the left). The images combined into this anaglyph were taken through the Pancam's L7 and R1 filters. The image was mosaiced together by the Pancam team, led by Jim Bell of Cornell University.
Credit: NASA /JPL-Caltech / Cornell
So instead of roving on to Site 5, Spirit turned back and headed east of Site 4 to continue taking detailed pictures of various candidate locations, including more images of the way south toward von Braun to see it if that valley might be a place it could drive across and if there are bailout zones where it could pull over if it ran into trouble. On Sol 1352 (October 22, 2007), the rover drove approximately 6 meters (20 feet) south-southeast toward the potential off-ramp of Home Plate, and acquired mosaics of images with the navigation camera and the Pancam. It also took spot images of the sky, conducted a survey of rock clasts with the Pancam, and searched for dust devils with the navigation camera. The very next sol, Spirit drove another 10 meters (33 feet) south-southeast toward the off-ramp and acquired more mosaics of images, surveyed the horizon, completed a survey of rock clasts with the Pancam, and again watched for dust devils.
On Sol 1354 (October 24, 2007), Spirit took some pre-drive Pancam pictures of the winter candidate hill Tsiolkovsky and drove another 12 meters (39 feet) south-southeast up to the potential off-ramp. After the usual post-drive imaging, the rover once again tested communications with Mars Express in preparation for next year's arrival of Phoenix.
"We then positioned Spirit on the down-ramp on the southern edge on the assumption we would go toward von Braun and Goddard," Arvidson said. But the engineers needed to do the topographic analysis of all the imaging acquired at Site 4 and since then to determine what would be the best place for Spirit to winter and that would take the rest of the month.
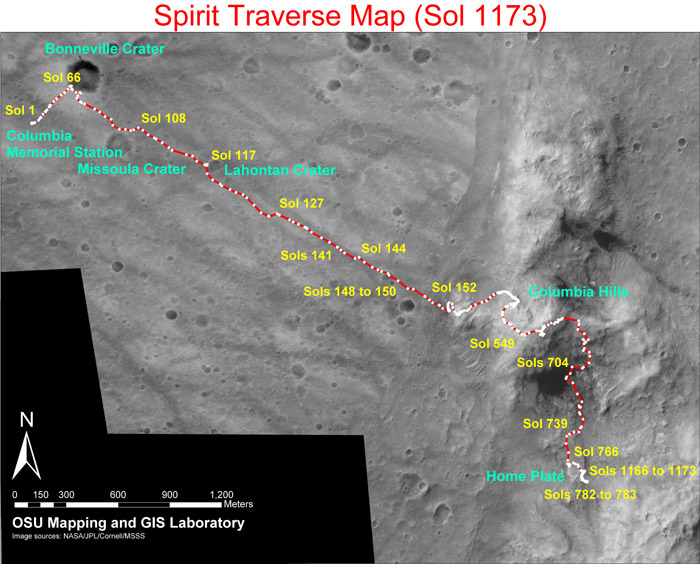 Spirit traverse map
Spirit traverse mapThis image, taken by the High Resolution Imaging Science Experiment (HiRISE) camera onboard the Mars Reconnaissance Orbiter (MRO), shows Spirit's travels through late April 2007.
Credit: NASA / JPL-Caltech / Univ. Az / USGS
Last weekend, Spirit just hung out on Home Plate, catching up on old work. "We did some things like looking at the sky with the MI with the window closed and open to see how dusty those surfaces are and also looked at its deck to see just how dusty it is," said Arvidson.
While the scientists are still reviewing the data Spirit has acquired in the last month, Arvidson has been "mining" the old observations. "It has become clear to me that Mitcheltree Ridge, the ridge to the east of Home Plate, Low Ridge, where Spirit spent the last winter, and a feature to the south called Crossfield [after famed American test pilot Scott Crossfield], form a kind of north-south structure that is in fact a syncline – where the rocks dip inward in the middle," he offered. "Synclines usually form in topographically low areas from compression, but they're higher here because the top of the syncline is covered by vesicular basalt, which is really tough, so it's an inverted topography. We're beginning to understand that the whole complex, including Home Plate, in the Inner Basin of the Columbia Hills has been structurally deformed. That's not particularly exciting to the public, but it's giving us insight into how those rocks were put into place and deformed structurally as they were being generated. What we see is an outlier of the plains volcanic materials that reached up into the Inner Basin, was pushed a little bit, and has been eroded down by wind. It's kind of a work in progress," said Arvidson who's currently at work on a paper detailing the observations and hypothesis.
Right now, Spirit is at the center southern edge of Home Plate, sporting power levels of around 345 watt-hours. In the final hours of October, the MER team of engineers had winnowed down the list of winter haven candidates to two choices -- South Promontory, which, though located on the southern side of Home Plate, features a northward promontory that juts out, or the north-facing edge of Home Plate, which appears to be the better location. Here was the rub: the location on the northern edge of Home Plate is in the exact opposite direction, 180-degrees, from von Braun, and back on the north side of Home Plate. But, as it turns out, Home Plate North was what the team settled on.
"It was a tough decision, but it's the right one," Squyres said. Although the decision will put the rover farther away from von Braun and Goddard, the trade-off makes sense for Spirit. "If we head to Home Plate North instead of South Promontory we will be about 10 drive sols farther from our goal, von Braun, but we also wind up being on a steeper northward slope that buys us an additional 10 watt-hours and that's what it came down to."
While 10 watt-hours may not seem like much, it can be the difference between life and death under certain circumstances. "I was the Science Operations Working Group (SOWG) chair for Opportunity during the toughest part of the dust storm, the point when that rover was just on the hairy edge of survival," recalls Squyres. "When it gets that bad, 10 watt-hours makes a big, big difference. This is going to be a very difficult winter for Spirit and if we can buy Spirit 10 watt-hours by trading 10 drive sols that's the right trade to make in my opinion and that's what we're doing."
Although the actual start of the coming Martian winter is a kind of fluid date and not anticipated until March or April 2008, when the team members analyzed the dust on the solar arrays and looked at the power situation, they concluded that January 1, 2008 is when they want Spirit to be in its winter position. Once winter passes, though, the intention, said Squyres, "is to put the pedal down and head for von Braun."
Opportunity from Meridiani Planum
When the calendar flipped to October at Meridiani Planum, Opportunity was in the midst of its examination of the top layer of the triple layered, light-toned rock that circles the interior of Victoria Crater and it spent the first half of the month digging into and examining that rock layer.
"There is this kind of ring at the top and two white layers just beneath it," described Bruce Banerdt, MER project scientist, of JPL. From top down, the three are named after famous stratigraphers – Steno after Nicholas Steno (1638-'86), Smith after William Smith (1769-1839), and Lyell after Sir Charles Lyell (1797-1875).
 Opportunity's forward view on Sol 1278
Opportunity's forward view on Sol 1278On Sol 1278 (Aug. 28, 2007), after weathering the dust storm, Opportunity was poised on the edge of Victoria crater, ready to enter.Credit: NASA / JPL / E. Tesheiner
After taking a series of pictures with the panoramic camera (Pancam) in the first sols of the month in addition to its routine observations of the tau or atmospheric dust levels with the panoramic camera (Pancam) and surveys of the sky and ground with the miniature thermal emission spectrometer (Mini-TES), Opportunity placed the rock abrasion tool (RAT) on Steno on Sol 1315 (October 5, 2007) and on the following sol used the instrument to grind into the layer. During the ensuing sols, the rover took microscopic imager (MI) pictures for a mosaic of Steno, then placed the alpha particle X-ray spectrometer (APXS) on the chosen target for overnight integrations. While taking X-ray measurements alone with this instrument only requires a few hours, one complete APXS measurement takes more than 10 hours and has usually been done at night.
On Sol 1321 (October 11, 2007), Opportunity moved about 5 meters (16.4 feet), mostly sideways, onto a second target spot on Steno, named Hall, where it took MI pictures and conducted another APXS study. "Steno, the ring at the top, is interesting because it looks like it's just a little bit different texturally and looks rougher in the multi-filter images from the Pancam," Banerdt said. "But we're not sure if the difference in the Pancam we can see in the Pancam imaging is actually because it's just a different texture or because it's a different composition."
 A new view of Cape Verde
A new view of Cape VerdeOpportunity took this false-color image of Cape Verde, one of the promontories that juts out from the walls of Victoria Crater, with its Pancam on Sol 1329 (Oct. 20, 2007), more than a month after it began its journey inside and just 9 sols shy of its second Martian birthday on Sol 1338 (Oct. 29, 2007). The rover used three Pancam filters, admitting light with wavelengths centered at 750 nanometers (near infrared), 530 nanometers (green) and 430 nanometers (violet) ont his image.
Credit: NASA /JPL-Caltech / Cornell
Despite the fact that Opportunity has been in restricted sols of late and has been working on 20-25-degree slopes -- something that had caused some concern last month -- the rover has been able for the most part to get to the targets chosen by the science team members. "The rover's mobility on this precarious slope has been stable and very predictable and we're happy with the way it has been performing, especially during the RAT grinds," Banerdt confirmed. "At Steno, we weren't quite able to reach the most desired place, but the rover got a really good IDD measurement in the layer at the spot it did get to."
Preliminary analysis of the data on Steno indicates that this layer looks similar to other Meridiani sulfate sandstones," said Banerdt. That actually stands to reason, because this light-toned rock layer was, the scientists think, the original surface of the planet before whatever it was impacted the area and created Victoria Crater. "It should be the same as what we've been driving across for the last three, four years," he said.
After Opportunity finished its study of Steno, it roved down the slope 1.9 meters (6.2 feet) toward the next target in the second layer, Smith, on Sol 1327 (October 17, 2007), taking the usual post-drive images with the Pancam and navigation cameras. The rover followed that drive with another drive on Sol 1329 (October 19, 2007), when it headed downhill 4 meters (13 feet) to the target. By Sol 1333 (October 23, 2007), the rover was conducting IDD work on the Smith layer.
"Interestingly, the blueberries in the MI images of these layers are actually microberries, 1 millimeter or less in size," said Banerdt. "These are not at all like the big juicy ones we saw as we were coming south from Endurance, when the berries got smaller and smaller until we got into the apron around Victoria and found more large blueberries sitting on the surface. Now, in the rocks at the upper reaches of Victoria, we're back to microberries. This is consistent with the hypothesis that when the impact that created Victoria occurred, it may have excavated material from deeper, material that came from rocks with larger berries and in that ejecta left those larger berries scattered around on the apron. The upper layers look like the stuff we were on before we came onto the Victoria apron. That's one hypothesis we're following here. We're wondering now if as we go deeper in Victoria we'll see larger berries?"
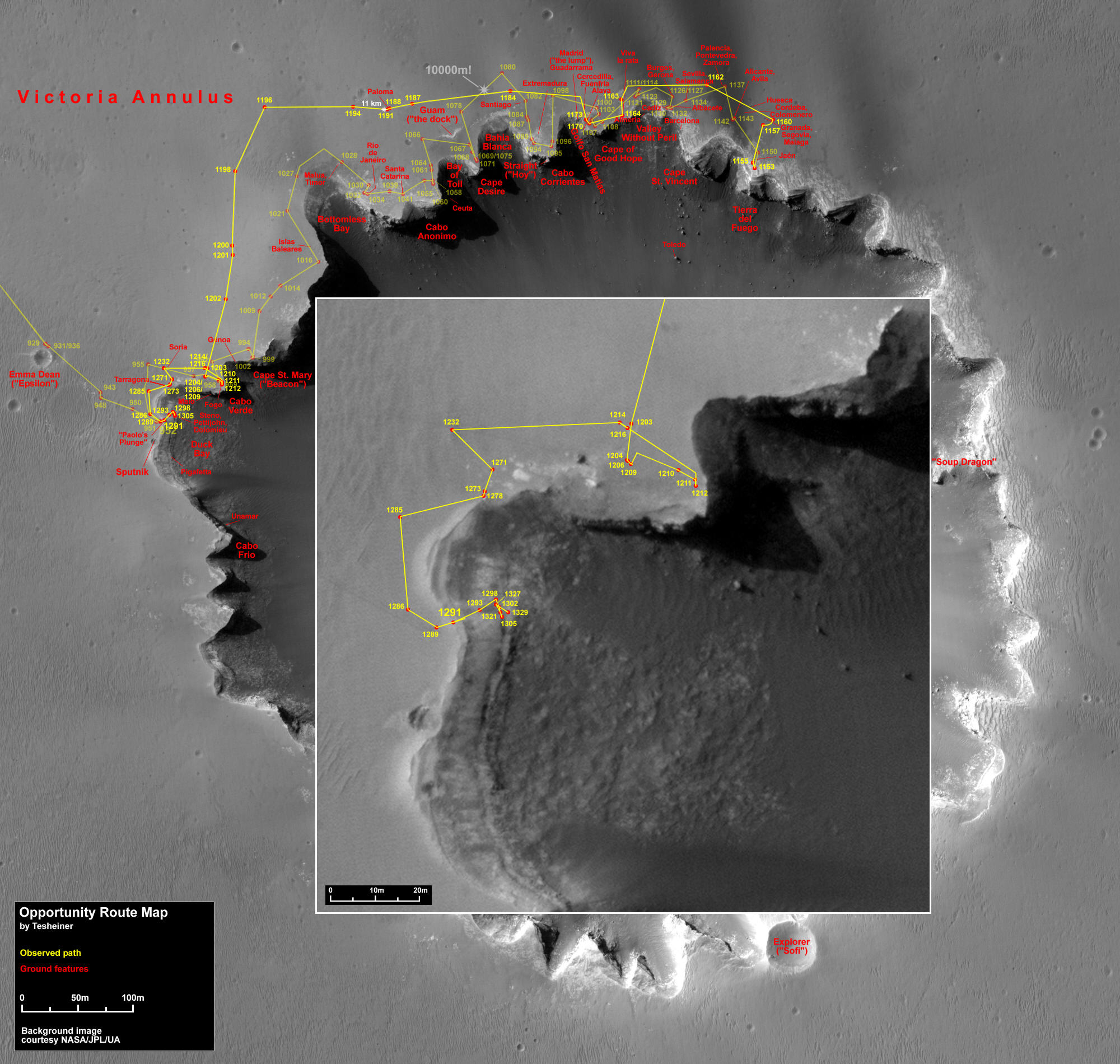 Opportunity's route
Opportunity's routeThis map, made from an image taken by the HiRISE camera onboard MRO, shows Opportunity's route from its arrival at Victoria Crater last year through Sol 1329 (Oct. 19, 2007).Credit: NASA /JPL-Caltech / Univ. of AZ / E. Tesheiner
Time will tell where Opportunity's journey into the Martian past, courtesy of Victoria, will take it. With its Martian gifts of wind gusts, one thing is certain -- the rover will be going with plenty of energy. Actually, considering that just two and a half months ago no one really knew if Opportunity would even survive the global dust storm, the rover was literally bounding with power as the month neared a close, sporting average levels of 600+ watt-hours, according to Banerdt.
The team is keeping a close eye, however, on the rock abrasion tool (RAT). "The RAT is way past its design life," Banerdt said. "Although Spirit's RAT grinder has not worked for a couple of years now, we're crossing our fingers that we have a dozen or more grinds left with Opportunity's and maybe many more than that. These rocks are generally very soft, and we're hoping to nurse it as far as we can but we just never know."
In fact, "just the other day we had a little funky thing happen with the RAT," said Squyres. "It looked like we had a glitch in one of the encoders that we use for the revolve axis of the instrument, the part that makes it go slowly round and round. But then we did a test and it worked fine, so we're not sure what it was." Right now, it doesn't seem significant, but the instrument team members will be analyzing that in coming days.
For the immediate future, Opportunity has plenty of other data to collect. The rover will follow the plan made last month and continue its study of Victoria's rock ring in November.
* This report was updated November 1, 2007 with the breaking news about the decision on where Spirit will spend the coming Martian winter.
For all the MER Updates, go to: http://www.planetary.org/explore/space-topics/space-missions/mer-updates/
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate