
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Spirit Works Winter Campaign as Opportunity Roves Adrift on way to Victoria

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
May 31, 2006
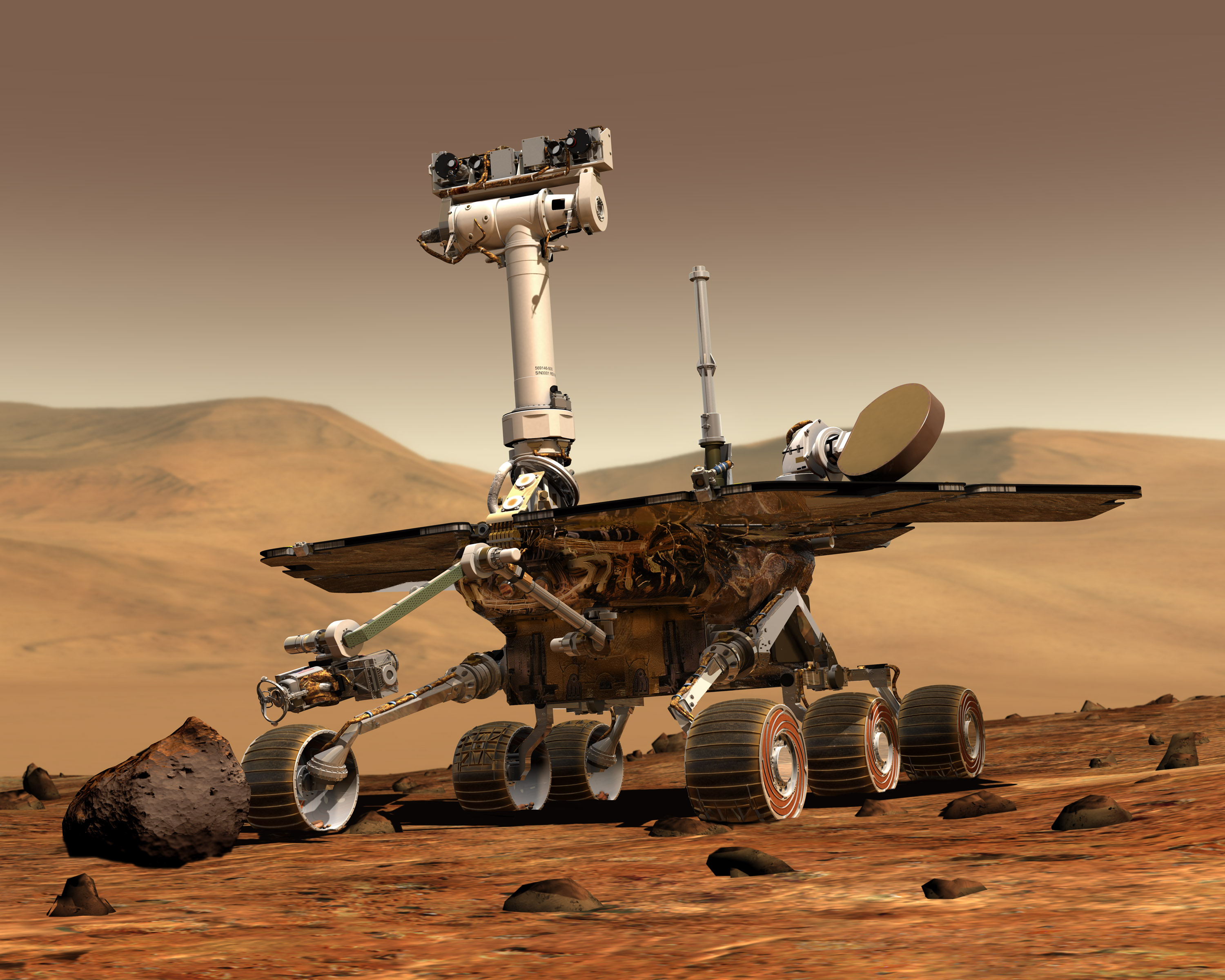 Mars Exploration Rover
Mars Exploration RoverCredit: NASA / JPL / Maas
The Mars Exploration Rovers are now well into their second Martian winter and, all things considered, both Spirit and Opportunity are faring pretty well for being, essentially, aging Baby Boomers on bitter cold, dusty alien planet some 50 million miles away from home.
Spirit has been working away on its winter science campaign at Low Ridge, near McCool Hill in the Columbia Hills area of Gusev crater. The rover began that campaign immediately on arrival at its winter haven last month by taking images of the biggest panorama ever ordered by the MER team and the work continued seamlessly throughout this month.
On the other side of the planet, Opportunity ended a really good month of driving down troughs and over ripples in the field of dunes it has been crossing on its way to Victoria crater by getting stuck in the Martian dirt. During the Memorial Day weekend, the rover unexpectedly came to a stop after partially burying its wheels in the loose topsoil as it was repositioning itself to make another run to the south through a trough. Since it had been driving backward, its rear wheels dug into the soil part way up its hubcaps, so to speak. Once the rover recognized that it wasn't getting anywhere, it terminated the drive, so its front (rearward facing) wheels only dug in slightly. The MER team discovered the situation early Monday morning.
Although it's a situation similar to what Opportunity encountered at Purgatory Dune more than a year ago, "it's not as bad," reported Steve Squyres, principal investigator for rover science, of Cornell University. "We feel very confidant about getting the rover extracted and we expect to begin the extraction process very soon," he told The Planetary Society yesterday. Opportunity could begin its exit as early as today, added John Callas, MER project manager at the Jet Propulsion Laboratory (JPL), in an interview.
Other than that "dirty" little drama, the rovers continue to perform remarkably well given their age and known mechanical losses. Spirit's right front wheel is still gone for good. Opportunity's instrument deployment device (IDD) could go any time, and one of its steering motors has failed. Other than those issues, however, both rovers are in fine operating condition and both have exceeded their "warranties" now by more than 2 years.
The MER team is having both Spirit and Opportunity regularly monitor dust levels on the solar arrays, camera masts, magnets, and in the atmosphere. Their energy levels have held fairly steady over the last month despite the continuing build-up of dust on their solar arrays. "We monitor the dust all the time," said Callas. "We have a model of what we thought the trend would be, and it's slightly better than that [on the rover arrays now], but the dust continues to accumulate." That means the dust build-up will be a concern until another gust of wind comes along to clear the arrays, and that's not likely to arrive until spring.
"It will be challenging particularly for Spirit," Callas acknowledged. The reality is that Spirit's energy is going to be lower than Opportunity's because of the difference in latitude. Opportunity is, simply, closer to the equator. Currently, Squyres said, Opportunity is producing around 400 watt-hours of power. while Spirit is running at about 330 watt-hours. "They are no worse than we expected and if anything maybe a little bit better," he said.
Spirit from Gusev Crater
Throughout the month of May, Spirit continued its winter science campaign, methodically collecting data of its surroundings with its suite of instruments, in a detailed way that it never has before. As Squyres put it in last month's MER Update, the team is "really shifting gears," and conducting more in-depth investigations ever undertaken with either rover, or, for that matter, by any rover on Mars.
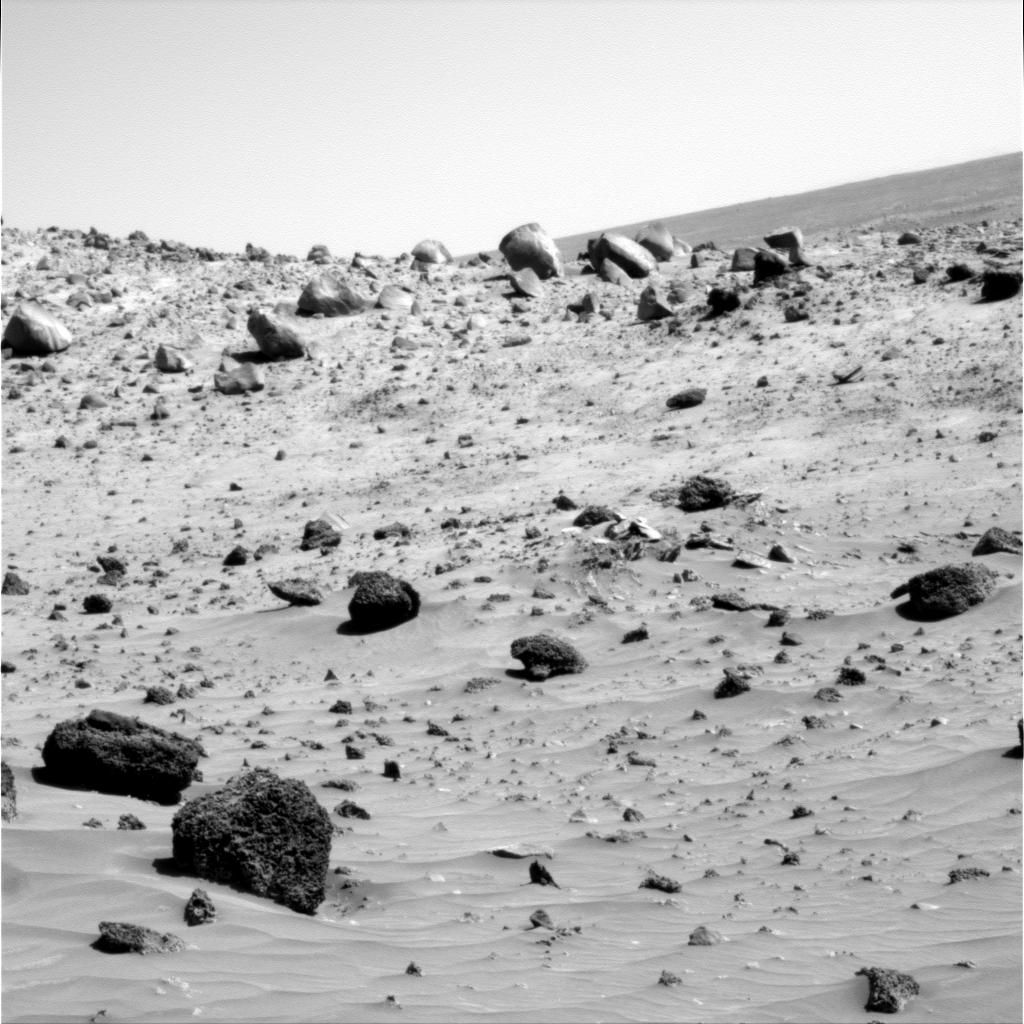
Looking back on Husband Hill
A field of Martian sand ripples separates Spirit from the slopes of Husband Hill it climbed last year. Looking back to the north on Sol 813 (April 17, 2006), Spirit acquired this late afternoon view of Husband Hill with the PanCam when the Sun was low in the sky. Because of the low-angle lighting, images like this provide excellent views of subtle textures in the topography near and far. The 150-meter (500 foot) wide field of curving sand ripples named El Dorado lies at the base. By collecting photos like this at different times of day, scientists can distinguish surface properties such as color and reflectivity and roughness, and by separating these components they can map more details of the terrain and even provide new clues about the geologic history of Gusev Crater.
Credit: NASA / JPL / Cornell
Even before leaving Husband Hill last year, Spirit was on a tight schedule because of the need to get to a north-facing slope for winter. With its arrival at Low Ridge, that changed. Since energy is an issue and the rover will probably be spending the entire season -- the next 7 months or so -- on this north-facing slope where it can absorb as much of the Sun's energy as possible, Spirit has the luxury really studying and examining the soils, bedrock, and atmosphere up-close and over time.
During the past 4 weeks, Spirit continued collecting the full-color, high-resolution, 360-degree McMurdo panorama -- what will be the king daddy of panoramas, a mosaic to be comprised of 27 columns of images. In addition, the rover examined several targets in the immediate area. "Concurrent with that, we've been doing a lot of atmospheric monitoring and deep thermal inertia measurements of rocks and soils over successive periods of time to infer their thermal physical properties," noted Callas.
During the first week of May, Spirit continued its studies of two soil targets dubbed Progress and Halley, using most of the instruments on its instrument deployment device (IDD) or robotic arm, in addition to acquiring images for columns 6 and 7 of the McMurdo pan, and making mini-TES observations of more distant targets.
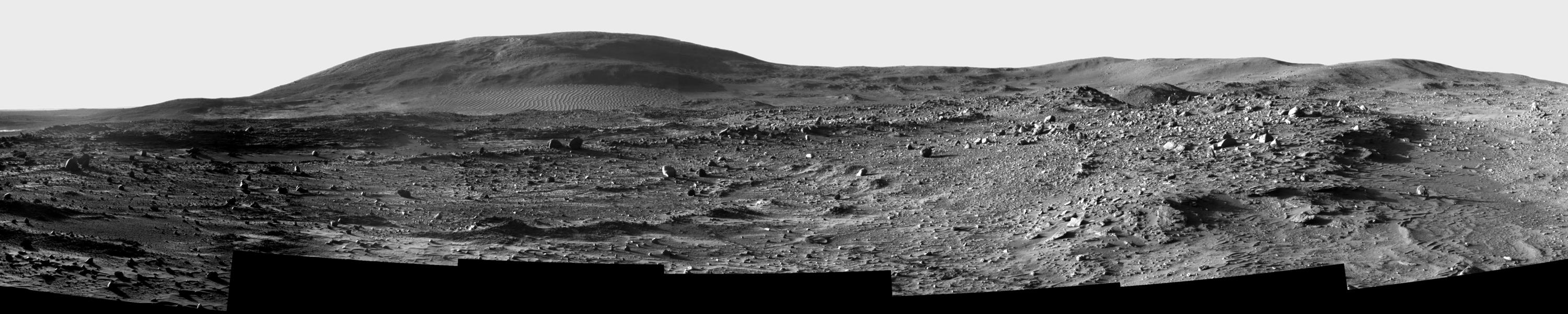
 The view from Low Ridge
The view from Low RidgeSpirit acquired this image of its surroundings from Low Ridge, its winter home, with the PanCam on Sol 853 (May 28, 2006) at approximately 12:34:50 Mars local solar time.
Credit: NASA / JPL / Cornell
On Sol 830 (May 4, 2006) Spirit positioned its rock abrasion tool (RAT) and brushed the loose topsoil of Progress for the first time, embarking on the first interplanetary layer-by-layer soil analysis on Mars. This progressive brushing soil experiment involves a multi-step process of removing the Mössbauer spectrometer from the target, flipping the wrist joint at the end of the robotic arm to put it in a better position for exchanging tools, re-touching the target with the Mössbauer spectrometer to confirm precise placement, and exchanging tools from the Mössbauer spectrometer to the RAT.
In the first phase of the experiment, Spirit removed a layer of soil about 1 millimeter thick (the thickness of a dime). During brushing, the rover took a movie of the procedure with the right lens of the hazard-avoidance camera, and then after the brushing acquired a microscopic imager (MI) picture of the freshly exposed surface, as well as a color image using all 13 filters of the panoramic camera (PanCam).
The rover also began a five-month, remote, photometric study of seasonal changes in surface properties of soil exposed in the rover's tracks in the Inner Basin leading to Low Ridge.
Since the Mars Reconnaissance Orbiter (MRO), which arrived at Mars on March 10 of this year, has been and still is in the aerobraking phase of its mission (using friction from the Martian atmosphere to refine its orbit), high-frequency X-band communications directly between Spirit and Earth have not always been available. So on Sol 830 (May 4, 2006), the Mars Odyssey orbiter began transmitting communications to Spirit at UHF frequencies.
By the second week of May, the rover turned its attentions briefly to the soil target Halley, checking it out with the Mössbauer spectrometer, and acquiring panel 11 of the planned 27-panel McMurdo pan, in addition to conducting the now routine remote sensing observations of rocks, outcrops, and other targets in the near distance with the mini-TES.
"We're banging out a lot of mini-TES," said Squyres. "Since we've got very little energy and the rover can only be awake for a short time each day, and because the surface is just really cold and we want to make the observations when the rocks are the warmest, the trick this time of year with mini-TES is to concentrate the observations in the late part of the day," Squyres pointed out. "The [observations] tend to be brief, because that's a tough time for the rover to be awake from an energy perspective, but the mini-TES is working fine and we're getting lots of data."
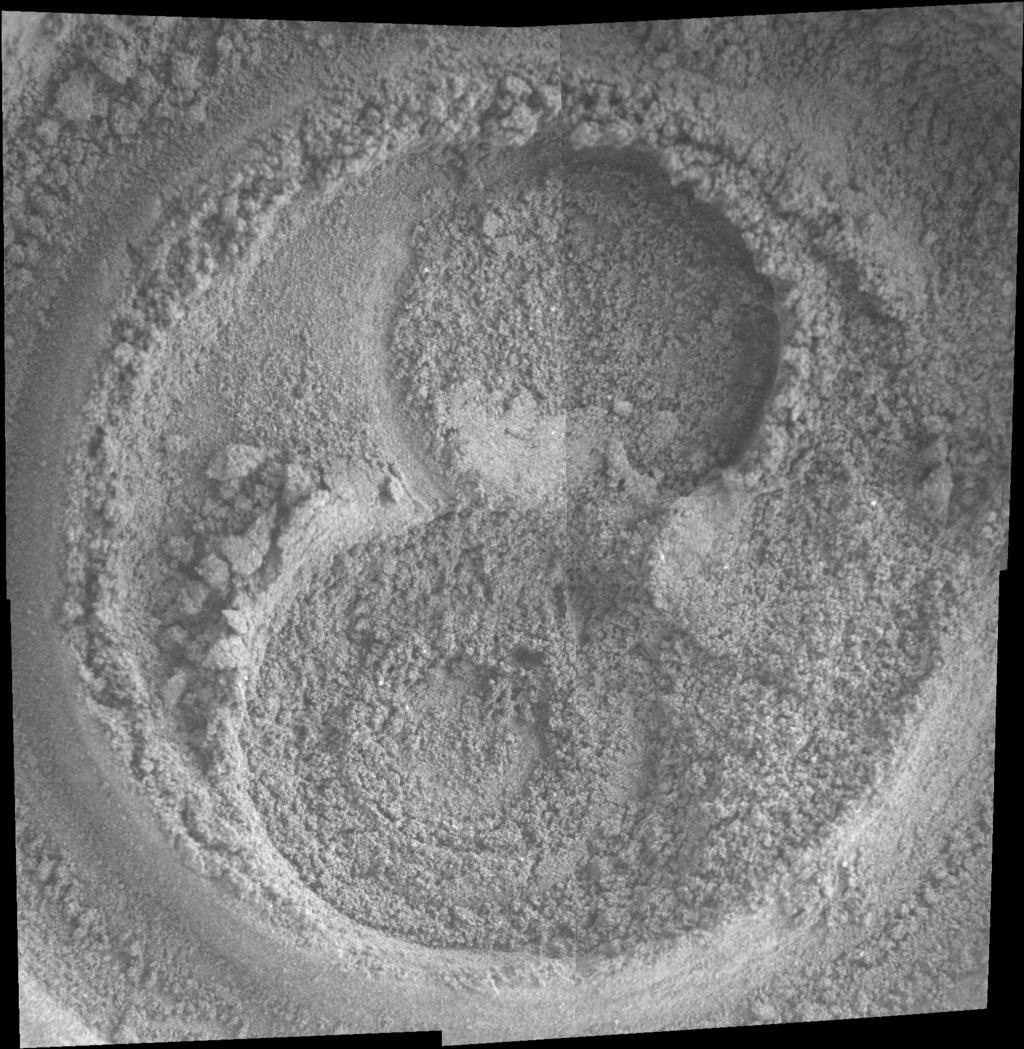 Brushing Progress
Brushing ProgressAfter exposing interiors of 5 times more rock targets than its design goal of 3 rocks, the grinding teeth have worn away on Spirit's rock abrasion tool (RAT), but the tool still has useful wire bristles for brushing targets. In this image, a figure-eight-like imprint in the Martian soil marks the spot where this rover examined subsurface deposits on the target Progress. This view is a mosaic of exposures that Spirit took with its MI during Sol 830 (May 4, 2006), the first day of the progressive brushing soil experiment, a multi-step process of carefully brushing away fine layers of soil, then using the Mössbauer and alpha particle X-ray spectrometers, microscopic imager, and PanCam to examine the exposed surfaces during the long Martian winter. The experiment is ongoing. Credit: NASA / JPL / Cornell / USGS
On Sol 842 (May 16, 2006), Spirit completed the first phase of the progressive brushing soil analysis experiment after collecting a mosaic of images of Progress with the MI and examining the brushed spot with the MI, Mössbauer, and APXS. Before commanding the rover to brush away a second layer, however, the MER planners performed a test to better characterize the position of the RAT above the soil. Since the IDD performed as expected in that test, removal of the second layer was scheduled for Sol 845 (May 20, 2006).
As the month progressed, the rover collected additional columns of the McMurdo pan and completed more targeted studies with the mini-TES, including remote analysis of two targets known as Allan Hills and Dome Fuji. With 5 of 7 opportunities to transmit signals to Mars at higher-frequency X-band wavelengths needed for higher-priority communications with MRO, engineers continued sending commands to Spirit via the UHF link on the Odyssey orbiter.
By the end of the Memorial Day weekend, Spirit had completed 15 of the 27 columns for the mighty McMurdo pan, was continuing its study of Progress after brushing away another 6 millimeters (a quarter of an inch) of soil to reveal a second layer, dubbed Progress 2. The next round of scientific measurements included a 49.5-hour study of Progress 2 divided over three sols, using the Mössbauer spectrometer. Spirit's total mileage remains at 6,876.18 meters (4.27 miles).
Opportunity from Meridiani Planum
At Meridiani Planum, Opportunity spent most of May continuing its journey south to Victoria crater, driving down troughs and over ripples on a Martian field dotted with patches of outcrop. After each drive, the rover stopped, imaged its surroundings, conducted some mini-TES observations of targets, or the sky and atmosphere. The trail the rover is blazing over this Martian landscape has been challenging, but Opportunity made impressive progress, averaging 100 meters a week, until Sol 833 (May 29, 2006) when it suddenly found itself stuck in the crest of dune.
 Opportunity route map to Sol 833
Opportunity route map to Sol 833A map of Opportunity's travels from Sol 543 to Sol 833 (May 29, 2006), the day it got stuck in the crest of a dune on the way to Victoria crater. As of Sol 833, the rover had traversed roughly half the distance from Erebus crater to Victoria crater, where it hopes to find the best stratigraphy or layered rock exposures yet.Credit: NASA / JPL / MSSS / Eduardo Tesheiner
While the MER team is working to extract Opportunity, the eyes of the science team remain for the most part on the prize of Victoria. At 800 meters in diameter, Victoria is 6 times the size of Endurance crater and will be the largest crater this rover has visited. Through its stratigraphy, Victoria will take Opportunity and the MER team farther back in Martian time, and, no doubt, uncover more about the water story there. Beyond that, 2 years ago, no one really believed the rover could possibly make it to such a distant locale and now it is so close.
Despite the Memorial Day misfortune, Opportunity had a productive month. After cruising past Sol 800 (April 24), the rover stopped for a 3-sol examination of an outcrop dubbed Brookville, which included microscopic imaging, a brushing, 16 total hours of integrated data gathering with the Mössbauer spectrometer, and an overnight integration with the APXS. After that assignment and checking out a target called Great Bend with the mini-TES, the rover hit the road for a three-sol drive. With the 30-minute drive on Sol 807 (May 1, 2006), the rover was estimated to be 1,279 meters (less than eight-tenths of a mile) from Victoria – and was finally, barely, able to see its rim.
Opportunity observed the surroundings from its new position with the navigation camera and the PanCam, then settled in for the night. The rest of the month the rover would follow a similar agenda of driving, stopping, imaging, observing, then driving on again as planned.
Although the rover has been regularly going into DeepSleep -- where all systems are shut down to ameliorate a power drain caused by one of the heaters in the IDD that is stuck in the 'on' position – which causes the rover instruments to experience increasingly colder temperatures, the mini-TES is still functioning well. Designed to survive temperatures only as low as -40 degree Fahrenheit for 90 days, the instrument has been operating beyond its scope for more than 2 years, and without the benefit of heat overnight could cease to operate any day, as principal investigator Philip Christensen, of Arizona State University (ASU), has previously noted in these Updates. Despite all the odds against it and the fact that it had been intermittently not working last year, the mini-TES, like the rover, is showing a resilience beyond all expectation.
As the second week of May got underway, Opportunity was examining the crest of a ripple during one of its stops, which included a stereo look at a target there called Pecos River with the MI. The rover subsequently used its mini-TES to check out a target called Horsehead, as well as sky targets. With the PanCam, it took images of Horsehead and another target called Chadbourne with all 13 of the camera's filters, and also monitored the dust on the magnets, camera mast, and in the atmosphere.
Roving into the middle of the month, Opportunity was within about 1,100 meters (two-thirds of a mile) of Victoria crater. Sol 816 (May 11, 2006) was deemed atmospheric-science day, so after driving 1.5 hours for 38.12 meters (125 feet) and taking post-drive images, Opportunity conducted a sky and ground observation with the mini-TES during the Odyssey link-up. After the Odyssey pass, the rover took a pre-sunset image with the PanCam. The next morning, it roved on.
 Opportunity digs another rest
Opportunity digs another restThis image, which Opportunity took with its right rear hazard camera on Sol 833 at approximately 12:29 Mars local solar time, reveals that the rover had gotten stuck in the dune on which it was repositioning itself for another long drive down a trough to the south and Victoria crater. It also explained why the rover came to a sudden stop over the Memorial Day weekend. This image is of the rear wheels – the rover had been driving backward when the misfortune occurred.
Credit: NASA / JPL / Arizona State University
By Sol 818 (May 13, 2006), Opportunity was investigating a rock target called Cheyenne, using the MI to examine the target, then the RAT's wire bristles to brush it. After the brushing, the rover used its APXS to collect data about its composition. The rover also took images with the PanCam for a mosaic view from the location reached by Sol 817's drive. The following day, Opportunity took a post-brush microscopic, stereo image for the mosaic of Cheyenne, evaluated that target's mineral composition with the Mössbauer spectrometer, and also took a PanCam image of Pueblo, an area of layered outcrop.
During the ensuing days in mid-May, Opportunity further examined Cheyenne with its Mössbauer spectrometer and imaged it with the PanCam, observed the sky and ground with the mini-TES, used the navigation camera to check for clouds, and of course drove.
In addition to its Meridiani work agenda, Opportunity took part this month in 2 communications demonstrations with Odyssey, using the UHF relay between the rover and orbiter. The point of the exercises was to aid in the planning for communications during the Phoenix Mars Lander mission, slated to launch in August 2007 and land in May 2008. The first demonstration was on Sol 812 (May 7, 2006), and the second on Sol 822 (May 17, 2006). Both were successful.
As the month progressed, so did Opportunity. The rover drove both forward and backward, using both blind driving (following a route chosen by rover planners) and autonomous navigation. To help the rover ease its way into the Martian winter season, rover planners started to home in on energy-rich "lily pads" -- regions with a northerly tilt -- at the end of each drive. By getting the rover to a position where it can tilt its solar arrays to the north, the MER planners can maximize the amount of Sun on Opportunity's takes in.
 From the back, err front looking back
From the back, err front looking backOpportunity took this image with its left front hazard camera shortly after getting stuck in a dune on Sol 833, at approximately 12:30 Mars local solar time. This image show the rover's front wheel, which are actually rearward facing because the rover.
Credit: NASA / JPL / Arizona State University
On the science discovery front, "[t]here haven't been any really big surprises," said Squyres. "That's sort of a good thing because we haven't really had to slow down and stop for anything. We're seeing bedrock and rippled bed forms that are very much in line with what we've seen previously, which means we don't have to linger anywhere. It's been kind of nice that there haven't been a lot of temptations to stop, because we think the really exciting science is ahead of us at Victoria. Since we're seeing stuff that we're already pretty familiar with, we've simply been trying to make as good time as possible, and we had been doing extremely well, better than 100 meters a week typically."
During the last week and a half of May, Opportunity executed both a robotic arm campaign, using used its MI, APXS, and Mössbauer spectrometer on a soil target Alamogordo Creek, and made two more drives toward Victoria Crater, among other things. Then, while Americans celebrated Memorial Day and the beginning of summer, Opportunity was braving the winter chill and getting ready to hit the road again. Instead it roved into trouble.
On Sol 833 (May 29, 2006), the rover was scheduled to drive for about 24 meters (79 feet), but excessive slipping caused Opportunity to terminate the command and as a result the rover only made 1.5 meters (5 feet) of forward progress. It was obvious what happened when the first pictures arrived at JPL in the wee hours of the morning Monday. The flight team directed Opportunity yesterday to take more images. Preliminary assessment, however, indicated that Opportunity's wheels are not buried as deeply as when it became embedded in Purgatory Dune on Sol 446. At the same time, neither troughs nor ripples there were considered wheel-embedding hazards. This dune, Squyres said, is not really all that similar to Purgatory, but the experience of being stuck is familiar in that it was a surprise. "It's a somewhat different geometry," he said. "And we're still trying to work out what it was about this one that got us."
 For comparison: Opportunity in Purgatory
For comparison: Opportunity in PurgatoryThis image was captured by Opportunity's left forward Hazcam on Sol 461 (May 11, 2005), two weeks after becoming deeply mired in the now-legendary spot known as Purgatory Dune.
Credit: NASA / JPL
"We're taking some documentary images of the rover, its wheels, and the tracks we created to make sure we understand the current state of the situation," added Callas. "Then, based on the review of that data, we'll make the decision as to how to proceed with getting her out of the situation she's in. Right now, it looks like it's within our experience base. We think applying the approach of just backing out is the right approach, but we will have to wait and review the data."
It's not all bad, said Squyres. In other words, it could have been worse. "The good news is that this [drive] terminated exactly the way it was supposed to." After the Purgtory Dune incident, which kept the rover at a standstill for more than a month, the team instituted slip checks in their drive sequences to help prevent any similar situations from happening again. "Unlike the situation at Purgatory where we just drove to the end of the drive blindly digging deeper and deeper, in this case, we had a slip-check built into the sequence, and the slip-check executed, saw extensive slip, and terminated the drive," he explained. "That's the reason we're not buried nearly as deeply as at Purgatory. The slip-check did it's job."
Although the team and Opportunity had been conducting slip-checks whenever the rover attempted something potentially hazardous, like crossing a ripple crest, they had not, as a matter of course, been conducting the slip checks as the rover was driving down the troughs. "Slip checking takes a long time to do, so when you are doing it, you don't make as much progress each day and so, since we have been able to drive safely down the middle of troughs without having to do slip checking we hadn't been doing it," Callas explained. "But here we never even got started down the trough, because the problem happened right where we were situated."
On the previous successful drive, Opportunity, as it turns out, actually parked on a slight incline to be able to tilt the solar arrays toward the Sun. "While we were in that incline, we did a series of turn in places, and a small arc, and then another turn in place, and that's probably where we got into trouble," Callas offered. "We were essentially on a ripple crest trying to do some maneuvers and not slip checking at that point." All of this maneuvering was to position the rover to have a straight shot down the middle of the trough. "What we probably should have done in hindsight is back down off the ripple before we did the turn in place to set up for driving down the middle of the trough," Callas said.
A look at the images reveals the dilemma. Since the rover had been driving backwards, the rear wheels are dug in about half way, but because the rover terminated the drive when it detected excessive slipping, the front wheels are barely dug in. "We are feeling confidant about getting out, but our focus for right now is a successful extraction from this feature," Squyres reiterated. To that end, the team has been scrutinizing all the data to figure out the most expeditious way out for the rover.
Even if the data are consistent with proceeding with the strategy of backing out, it may not happen in one move, Callas said. Nevertheless, there seems to be little worry about getting the rover out and on its way to Victoria soon. There is, however, acknowledgement of lessons to be learned. The team will be looking at the data "to fully understand why this happened and just to carefully assess the way we're doing slip checks," said Squyres.
"Driving on Mars is tricky business," Squyres reminded. "The problem is you've got to find balance. If you take it an ultra conservative approach to driving -- if the way you drive is one where you never, ever get stuck because you're doing slip-checks every couple meters, you'll probably never get to Victoria crater. On the other end of the spectrum, if you are foolhardy and reckless, you are going to get stuck frequently and while we know how to get unstuck, it takes time. We're trying to find the right balance. The driving has been good this month and now we've had this temporary setback. But we hope to reverse this situation rather expeditiously and be on our way."
As of this morning, Opportunity was 925 meters (about a half mile) from rim of Victoria as the crow flies. Despite the fact that the rover is driving into the dead of winter, it's location closer to the equator makes for less concern among the teams members, because the Martian winter won't be as threatening in Meridiani. "The projections that we've done suggest that the rover will be able to continue to be mobile throughout the coldest, darkest parts of winter," said Squyres. "We think even in the depth of winter we could still get an hour of driving every day if we needed or wanted it," added Callas.
There is still no official estimated time of arrival for Victoria crater. Squyres maintains his policy of making no predictions: "We'll get there when we get there," he said yesterday. But if Opportunity does maneuver off the dune soon and can return to averaging 100 meters a week progress, the rover could be pulling up to Victoria's rim by late July or early August. Opportunity's mileage as of Sol 833 (May 29) was around 7,975 meters (about 4.9 miles).
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate