
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Curiosity update, sols 2027-2092: Return to drilling at Duluth, sciencing the dust storm
Written by
Emily Lakdawalla
June 29, 2018
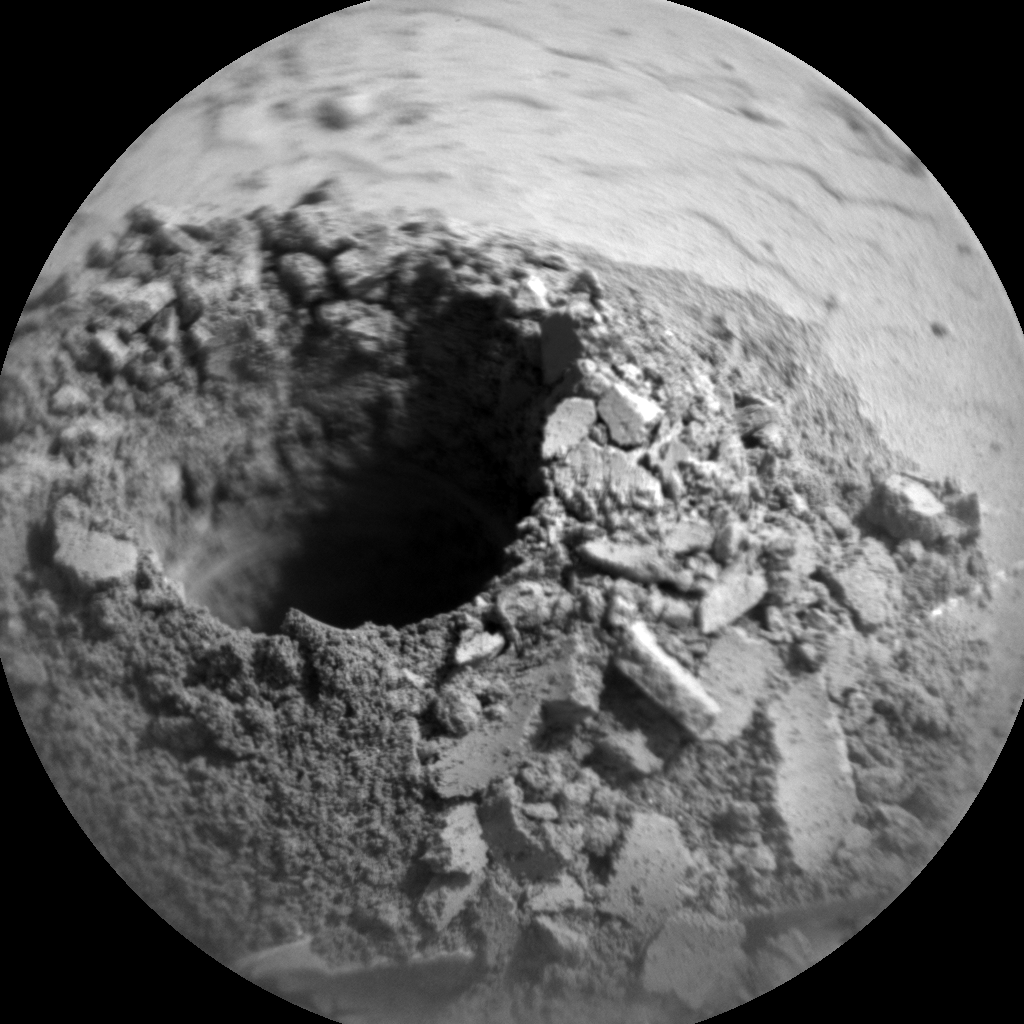
What a difference a few weeks can make! Suddenly, Curiosity is back to full field site operations, the kind it last enjoyed at the beginning of its traverse south from Murray buttes. A total of 562 sols elapsed between the previous successful drill at Sebina (sol 1495) and the newest drill site, Duluth (sol 2057). The rover successfully delivered sample to both laboratory instruments, CheMin and SAM, using its new feed-extended sample transfer (FEST) technique, took a self-portrait, and drove away on sol 2084. In all, it spent 30 days at Duluth -- not bad, and likely to get much faster as long as nothing else breaks (knock wood). The team now plans as many as three more drill stops in the near future, up on top of Vera Rubin ridge.

It's been a long time since I opened this Photoshop file to add in a new drill hole image!

The other main theme for this update is the global dust storm of Mars year 34. The storm began on the opposite side of Mars from Curiosity, and was first mentioned in a mission update during planning for sol 2074. Unlike poor solar-powered Opportunity, Curiosity doesn't suffer any direct threat from a dust storm. There are some minor inconveniences, but any inconvenience is more than offset by the excitement of getting to study a global dust storm from the inside of it. Still, the whole Curiosity team is pulling for Opportunity to get through this. (Many team members, of course, serve both missions. I wonder if it feels good to use one rover to science the heck out of a storm that's delivered a blow to the other one.)
Before the dust storm came in, Curiosity did have the chance to take some fun animations of Phobos crossing the Sun, as it does for a few sols close to every equinox.
Longtime readers will recall the problem with Curiosity's drill that has kept it inactive since the last drill attempt at Precipice on sol 1536. I explained the plans for returning the drill to function last year. They needed to develop and deploy two new techniques: feed-extended drilling (FED), in which the rover uses arm motion rather than the stalled drill feed to advance the drill into rock, and feed-extended sample transfer (FEST), in which the rover rotates the drill backward to drop sample into the laboratory instruments.
To make things even more complicated, the drill feed failure at Precipice happened when they were testing a different new drill technique, rotary-only drilling. Rotary-only drilling was intended to reduce wear on the drill percussion mechanism, which has experienced intermittent short circuits. So when they first attempted feed-extended drilling, at Lake Orcadie on sols 1977 and 1984, they were also using rotary-only drilling. And it didn't work. It was difficult to be certain why, but based on comparisons of drill performance on Mars and on Earth, they thought the reason it didn't work was because Lake Orcadie was harder than previously encountered rocks, and Curiosity really needed to use percussion to get the drill to sink into the rock. It would make sense, given that Vera Rubin Ridge is, well, a ridge, more resistant to erosion.
So they planned to change two things for the next attempt. They'd try feed-extended drilling with percussion, and they'd return to the rocks at the base of the ridge, which were (they thought) likely to be softer. Those two changes turned frustration into success. Now we have to hope that the addition of percussion capability will give Curiosity the power it needs to drill into, and sample, rocks farther up the ridge.
Also notable: by drilling at Duluth, Curiosity has now successfully drilled all mapped subunits of the Murray formation below Vera Rubin ridge. The specific layer Curiosity drilled into at Duluth is called the Blunts Point member of the Murray formation. The ridge is still Murray formation. The future drill sites will be into layers the scientists have named the Pettegrove Point member (lower ridge) and the Jura member (upper ridge).

The team had developed rotary-only drilling in response to the shorts in the percussion mechanism, seeking to reduce use of percussion. But it didn't work to drill into a rock as hard as at Lake Orcadie. So they developed a new algorithm that allows the rover to respond in real time to the conditions encountered at a drill site. Project scientist Ashwin Vasavada explained the decision tree to me.
The drill begins in rotary-only mode. The rover has sensors that enable it to measure the rate at which the drill is penetrating the rock. If the drill's downward motion fails to reach a threshold rate, then the rover will turn on percussion, beginning at the lowest level of 1 (out of 6 levels). When preparing to drill, engineers on Earth can tune how high a percussion level the rover is permitted to use.
The Duluth drill hole went to completion very quickly. They commanded the rover to drill to a depth of 50 millimeters, using a maximum percussion level of 5 out of 6 levels. The maximum possible drill depth is 65 millimeters; the more conservative number was a way to minimize the use of percussion and still generate enough sample for delivery to the laboratory instruments and produce a dump pile for later examination. Ashwin told me it actually went to 55 millimeters, with mostly rotary-only drilling, and the maximum percussion level went up only to 2 out of 6 before it reached the desired depth. As far as drilling went, it was a "total success." However: "It's not over 'til we get a diffractogram from CheMin."
Taking a look at the drill tailings pile after the rover removed the drill, I wondered if some of the chunks were actual chunks of rock or just compressed tailings. Ashwin said the team had the same question but after they analyzed the images, they believed it was all powder (a conclusion that was later verified as they worked with the collected sample).
When the drill feed was working, they'd use a mechanism on the turret to sieve and portion out tiny amounts of powder to CheMin and then SAM. CheMin usually receives one portion, SAM a triple portion. In Earth testing, they developed a plan for rotating the drill backwards and using a tiny amount of drill percussion to encourage small amounts of sample to come back out the drill. But Earth rocks aren't Mars rocks and Earth gravity is three times Mars gravity, so they needed to test how much sample really came out of the drill in feed-extended sample transfer before committing to trying a real delivery.
They test-delivered three portions to the ground on sol 2059. Ideally, they would have done before-and-after investigations of the drop site with the MAHLI camera on the end of the arm. Unfortunately, as long as there is sample powder located in the chamber above the drill, the rover can't use MAHLI or APXS without risking spilling the sample. They assessed the drop-off spots with Mastcam, and it looked like they were all displaced from the spot they'd expected the sample portions to fall, possibly because of wind. There was also less powder than expected, but not grossly less.
They decided to proceed to drop sample to CheMin on sol 2061. For reasons unknown, that sample dropoff didn't get enough sample into CheMin, which was disappointing. Maybe the wind blew it away? They tried delivering a sample to the workspace another time, this time placing the drill a little closer to the ground. They also tried delivering a sample to the back of one of the SAM inlet covers. In both cases, there was a tighter pile. In the case of SAM, there was no offset of the position of the pile from its expected position. Maybe the wind guard around the SAM inlet helped. (CheMin also has a wind guard, but the wind guards all have openings, and CheMin's might just happen to be facing in the upwind direction, though it's hard to know for sure because the wind sensors don't work anymore.)
The engineers worked to figure out how close they could safely get the drill to the CheMin inlet. They'd been working with a higher distance that would be safe regardless of rover orientation; they tuned their estimates of the rover arm position based on the actual position and orientation of the rover at Duluth. They commanded another delivery attempt to CheMin on sol 2068. It worked.
"That was the real one-and-a-half-year victory right there," Ashwin told me. Three days later, they got a triple portion to SAM. Another victory.

When drilling, CheMin always accepts a sample. SAM usually accepts one sample, but not always. After checking out the sample, SAM may decide to run a second experiment. With the old way of drilling and delivering sample, this was no problem, but with feed-extended sample transfer, the rover can deliver fewer samples before running out. That's because the reverse-auger method using the drill is only capable of delivering as much powder as is still in the drill stem after drilling is done.
Based on Earth testing, they generally expect to acquire 10 to 15 deliverable portions using the new technique. They had already used 12 portions (3 for the drop tests, 1 for the attempted CheMin delivery, 2 more for drop tests, 6 more for successful CheMin and SAM deliveries). The engineers examined all the data for the Duluth drill site and decided that there would likely be sufficient deliverable sample remaining to send one more triple portion into SAM.
However, after all that, the SAM team decided one sample was enough, and the rover was ready for cleanup. The engineers dropped a single portion on the observation tray bolted to the front of the rover for examination. Then they did a "portion to exhaustion" test, dropping to the workspace in front of the rover, to see how they'd done on their estimate of deliverable sample portions. The answer: three portions had remained, for a total of 15 portions -- exactly what they estimated. These engineers are good.

It's historic that the observation tray got used on sol 2078. The last time Curiosity tried to use it with an actual drilled sample was way back at Yellowknife Bay, on sol 289. The team found that the observation tray wasn't useful because the vibration of the CHIMRA sample portion device used to deliver portions to the tray vibrated the whole rover enough that dropped sample just walked right off the tray. Now that they aren't using CHIMRA vibration to deliver sample portions, dropped samples stay on the tray. A teeny flash of a silver lining sighted as the cloud of the drill problems clears!
Curiosity drove away from Duluth on sol 2086 under skies that had suddenly gotten quite dark with dust. What does the dust storm mean for Curiosity? Mostly, science. Ashwin told me that the environmental science team put together a dust storm science plan (meaning, a set of desired observations) that could be used whenever it seemed a storm was gathering. That plan has been triggered twice before, but in both cases the storms petered out. This time, the storm developed, and the meteorologists have been having a field day. The plan includes desired sets of observations, at what times of day, at what frequency, and so on; mostly, it's designed to keep the enthusiastic science team from taking more data than is necessary to understand the phenomenon.
The effects of the dust storm on the nuclear-powered rover are, as I mentioned, very minor. Temperatures stay much warmer at night, but are much cooler during the day, than is typical. And exposure times for images need to be much longer. Fortunately the rover cameras have autoexposure capability, so they will keep the shutters open as long as needed to get enough light to see by, but the team does have to have enough time margin in the plan to give the cameras long enough to finish shooting their photos, or there may be a fault that stops science.
The sky is opaque enough over Curiosity that there aren't cast shadows anymore -- it's like an overcast day. Painters and photographers on Earth know that this kind of shadowless light is wonderful for pulling rich colors out of a landscape, as long as it's not too dark of course. Mars, too, is looking more colorful, but of course red rather than gray or blue as our overcast days are. I need to rein myself in from getting too wild in my interpretation of these dusty-sky images, because it's likely my human eyes would respond to this diffuse red light differently from the Mastcams. I'll leave you with that thought, wondering what Curiosity's environs would look like to you, if you were there.

And now, the collected blog updates from the mission team, compiled from the JPL website.
Sol 2027-28 update by Scott Guzewich: A Change of Season (20 Apr 2018)
This was a week of transition for Curiosity's environmental science team. The cloudy season on Mars has ended as we've seen a marked decrease in water ice cloud activity in our Navcam sky movies over the last several weeks and we're moving quickly into the dusty season on Mars. We will now be drastically reducing the frequency in which we search for clouds and instead focus our attention on dust devils and storms. The atmosphere is beginning to get dustier, as seen by the hazy look of the northern rim in Gale Crater in this image. Indeed, we began preplanning our annual campaign to study a potential global dust storm, if and when such a storm develops this year. The dusty season on Mars, roughly the second half of the martian year, runs from the end of May until February next year, and we'll be monitoring closely for the signs that a global dust storm (the last of which occurred way back in 2008!) is developing.
But today on Mars, routine business continued as we performed a "touch-and-go" plan with MAHLI images of rock targets "Hawick", "Kemnay", and "Buchan", before driving toward our next destination. On the second sol of the plan, we planned two movies to look for dust devils and two more Mastcam image sequences to monitor the (increasing) amount of dust in the atmosphere as we move toward southern spring equinox.
Sol 2029-2031 update by Abigail Fraeman: Booking it Through Biwabik (20 Apr 2018)
Curiosity drove a whopping ~85 m to the northwest in the sol 2027 plan. Besides being long, this drive was remarkable because it marked a shift in Curiosity's strategic campaign: we have officially finished our initial reconnaissance of Vera Rubin Ridge, and we are beginning our journey down off the ridge, heading north into an area where we would like to test the rover's drill. The guidance from the team is now "drive, drive, drive!," while still doing as much opportunistic science as we can along the way of course.
With the sol 2027 drive, we have also officially entered the Biwabik Quad. You may recall we flirted with the boundary of this quad back on sol 2004-2007 and 2009-2012. Biwabik is a city in the United States in northern Minnesota that is connected with the Mesabi Range. This range contains a vast iron deposit, so we felt it was a perfect choice for the hematite-rich area we are currently exploring. (Hematite is an iron-rich mineral). Entering a new quad means we have a fresh set of target names to choose from, which added some fun to our morning planning. One of the names we chose, "Babbitt," is named after a city of ~1,500 residents about 30 miles away from Biwabik. Our Flagstaff-based team members also liked this name because it was reminiscent of the famous Babbitt Brothers who made a name for themselves as cattle ranchers in Flagstaff Arizona in the early 1900s.
We planned 3-sols today. In the first sol, we will have a morning remote sensing block with ChemCam observations of rock targets "Ely," Babbitt, and "Hibbing." These observations will be accompanied by Mastcam documentation images. We will also take a Mastcam mosaic and some multispectral frames of a nearby crater, and we have named this feature "Taconite." The remote sensing block will be followed by MAHLI and APXS observations of Babbitt. In the second sol of the plan, we will take a morning dust devil movie and use MAHLI to look at our wheels and document any punctures that may have formed over the last few hundred meters of driving. This will be followed by short drive along our strategic route with post-drive imaging activities that will set us up for a touch and go on Monday. The third sol of the plan is all about monitoring the Martian environment. We will take an overnight measurement with APXS to understand the Argon abundance in the atmosphere (it varies seasonally), and spend the morning taking a zenith movie, horizon movie, crater rim extinction imaging, and tau measurement. We will also use the ChemCam instrument in passive mode to take a spectrum on the atmosphere around noon. It will be a fun and busy weekend on Mars!
Sol 2032-2033 update by Abigail Fraeman: The Rocks vs. Stone Cold Aluminum Wheels (23 Apr 2018)
Curiosity drove a little over 16 m to the west this weekend. The rover is currently skirting around the southern edge of a small, blocky impact crater on its way north off the Vera Rubin Ridge. One of the activities we did this weekend was use MAHLI to take images of the rover wheels. We do this activity, dubbed Full MAHLI Wheel Imaging (or FMWI in NASA acronym speak), every few hundred meters to track damage to Curiosity's wheels caused by the terrain. It's important for us to take this observation in order to estimate how much farther the rover will be able to drive before the wheels become inoperable, and also to understand if the sharp edges of the broken wheels risk damaging the nearby cables. So far, we estimate we're in pretty great shape for our plans to drive a lot farther up Mt. Sharp!
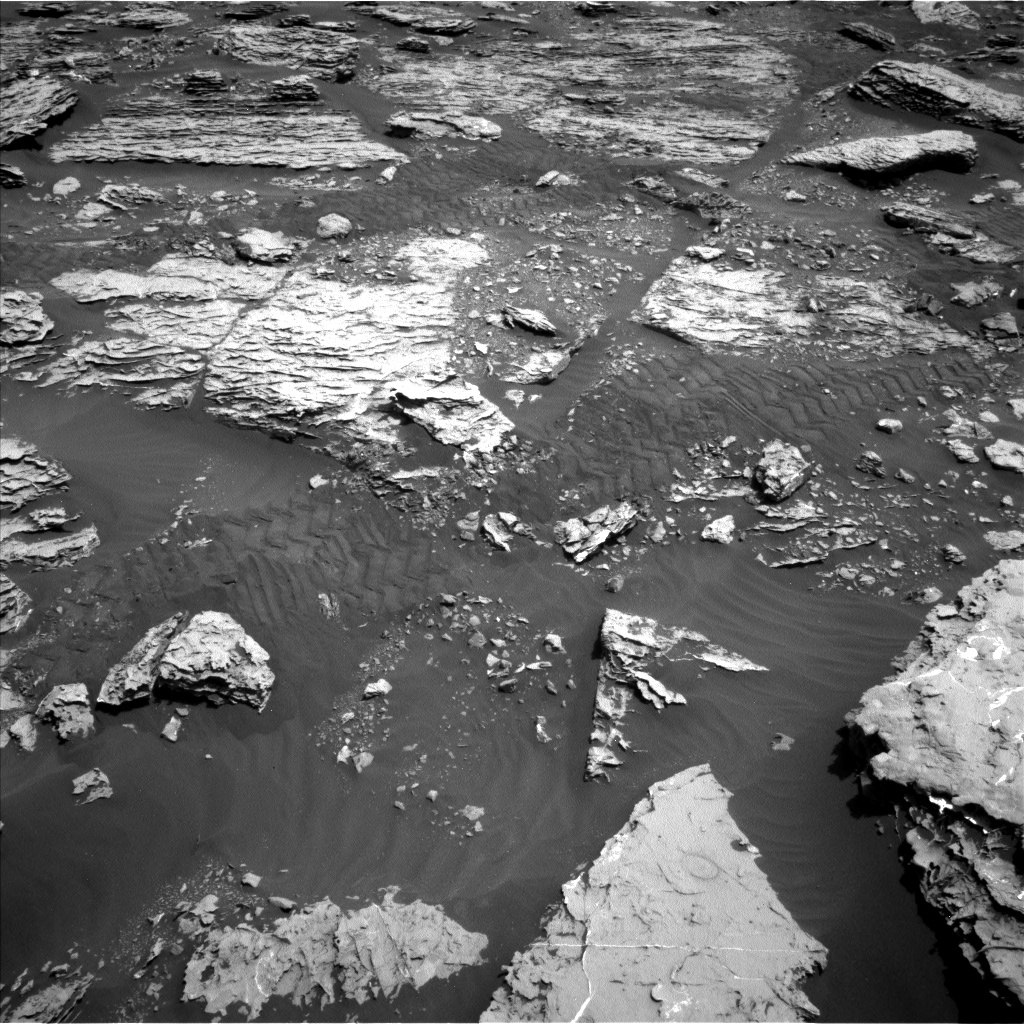
For the last few years, we've been actively working to mitigate wheel damage in several ways. JPL engineers developed some smart driving algorithms called "traction control" that reduce forces on Curiosity's wheels as the rover climb over rocks. Geologists like myself also help by planning drive paths over terrain that is safer for the wheels. We do this on a sol-to-sol basis in tactically staffed roles known as Surface Properties Scientist (SPS), which is what I did today. Strategically, we also work with the orbital datasets to predict what the terrain ahead will look like, and we use these predictions to choose long-term paths that will be easiest on the wheels without sacrificing science. If you look closely at the rover pathfrom the last few sols in the orbital data, you may notice we've been driving along terrain that looks darker and bluer in this false color image compared to the nearby bright, tan rocks. This path corresponds to terrain that is filled with pebbles and hard-packed sand, and we think it's a little nicer for the wheels than the bright bedrock, which can sometimes have sharp edges. The geologic term for these sharp edged rocks is ventifacts, and they are formed by wind erosion over millions of years. While they probably won't hurt the wheels too much, we'd prefer to avoid them when possible.
Today we planned two sols. We'll start the first sol with MAHLI and APXS observations of a bedrock target named "Pokegama." The contact science is followed by some time for remote sensing, which includes a Mastcam mosaic of the nearby crater named "Taconite," and a single image of interesting looking rocks named "Winton," and "Cuyuna." We'll also have ChemCam LIBS and Mastcam documentation images of Pokegama and "Kenora." After the science block we'll have a short drive followed by post-drive imaging and a ChemCam AEGIS observation. In the second sol of the plan, we'll take a Navcam dust devil movie and second AEGIS observation.
Sols 2034-2035 update by Mark Salvatore: Descending Vera Rubin Ridge (25 Apr 2018)
Curiosity is continuing her march to the north and west, descending through the stratigraphic layers exposed in Vera Rubin Ridge and working her way back towards the unit known as the Blunts Point member, just below the ridge. Curiosity will continue her investigation of each of these stratigraphic layers, filling in all of the details necessary to interpret the geologic history of this region.
Until then, the science team is keeping Curiosity busy with additional measurements to better interpret the local and regional geology. In today's two-sol plan, Curiosity will begin with a 1 hour and 40 minute science block dedicated to studying the exposed rocky material in front of the rover. The science block kicks off with ChemCam measurements of surface chemistry using the onboard laser and spectrometers. The targets include "Mesabi," a textured rock towards the left-front wheel, then "Wakemup Bay," which appears to be in-place bedrock, and finally "Midway," a long and narrow rock in front of the rover that has potentially been broken apart by the small impact crater (named "Taconite crater"), to the north of Curiosity. ChemCam's high resolution camera will then be used to image a rock on the western rim of Taconite crater (named "Logan") at very high resolution to see if it shows any interesting features associated with the impact cratering process itself. Mastcam will then be used to image the surrounding area, including all of the ChemCam targets that were analyzed. In addition, a multispectral image suite will be obtained of Taconite crater's nearby ejecta field, as a way to determine whether the composition of the ejecta blocks are at all variable, which may indicate that the subsurface geologic units differ in composition from those closer to the surface. Stay tuned!
Following this science block, Curiosity has a ~48 meter drive planned to the northwest, which would result in another 10 meters or so of decreased elevation as we near the Blunts Point member. Standard post-drive imaging activities will then occur, obtaining images of the landscape surrounding the rover for both scientific and engineering purposes, as well as a MARDI image of the terrain immediately below the rover's belly.
The next sol, Curiosity will use her automated targeting capabilities to retrieve chemistry measurements of a nearby bedrock target. Following a nap and a quick chat with one of the Mars orbiters, Curiosity will then have one additional science block that is dedicated to environmental monitoring, including measuring the atmospheric dust concentration and searching for dust devils. This will then bring us to Friday, when the science team will plan for a weekend of activities and a drive that will have Curiosity once again head downhill.
At this location in Gale crater, the team is naming targets after locations in northeastern Minnesota. The names chosen today are perfect to use while we're still on Vera Rubin Ridge, as the Mesabi Range is part of Minnesota's Iron Range, a series of Precambrian (i.e., old!) sedimentary units that are enriched in iron. These areas were heavily mined in the early 1900s, and were an important part of Minnesota's economy at this time. Currently, this area is still being mined for low-grade iron ore known as "taconite" (hence Taconite crater!), a sedimentary rock with significant amounts of iron and other mineral phases. Kudos to today's science team for the relevant names!
Sols 2036-2037 update by Michelle Minitti: Down the ridge she comes (27 Apr 2018)
Curiosity continues to pick her way downhill off the "Vera Rubin Ridge" and onto the Murray formation rocks below. This weekend's plan only covers two sols, to give Earth planning time and Mars time a chance to realign so that the science team is not up in the middle of the night commanding the rover. The two sols, however, are still chock full of activities. The rover is positioned on a rock-strewn sandy slope, and the science team thought the scattered rocks of the workspace would be better interrogated with Mastcam and ChemCam than MAHLI and APXS. ChemCam targeted "Virginia," a tan bedrock slab with small nodules, "Shannon Lake," a red bedrock slab, and "Eveleth," a block with distinctive layers. One of the advantages of driving backward is that rocks the rover has driven over end up in view of the remote sensing instruments. Mastcam acquired multispectral data from a rock broken by the rover wheels, the target "Britt," and an expanse of crossbedded ! outcrop, "Aurora," to the left of the rover. Mastcam completed imaging of the "Taconite" crater structure, which the rover has been skirting around the last several sols, with a large mosaic, and captured a single image of a well-preserved scarp in the sand amongst the rocks dubbed "Kinney."
While MAHLI did not see any action over rock targets today, she will image the REMS UV sensor, positioned on the rover deck. Such MAHLI images keep track of dust accumulation, supporting the observations of the sky made by the sensor. The sky itself will get attention from Mastcam and Navcam, with observations of dust in the atmosphere and dust devils at midday, and observations of dust in the atmosphere and clouds in the early morning.
After a ~50 m drive, Curiosity ought to be positioned within sight of two prominent vertical outcrop faces farther east along the Vera Rubin Ridge. These are high interest targets for imaging for next week, as the team hopes they provide further insight into the structure and formation of the ridge itself. After the drive, CheMin will conduct an empty cell analysis, a move in preparation for what the team hopes is acquisition and delivery of a new drilled sample in the not-too-distant future.
Sol 2038 update by Rachel Kronyak: Enjoying the views (30 Apr 2018)
A successful drive in the weekend plan set Curiosity up nicely for a full sol of contact and remote science. The main priority during planning today was to image the outcrop we've called "Red Cliff," a beautiful vertical cliff face seen in the mid-field of the Navcam image above.
We'll use both the ChemCam RMI and Mastcam to image Red Cliff, which will give us a really nice, well-rounded dataset in order to fully characterize the features and sedimentary structures present in the outcrop. Aside from imaging, we'll assess some local bedrock targets. With ChemCam LIBS, we'll analyze targets "Paulsen Lake," "Negaunee," and "Nashwauk." With MAHLI and APXS, we'll perform additional analyses on Nashwauk. Finally, we'll do some standard ENV activities, including REMS, DAN, and a tau measurement. During a tau observation, we use Mastcam to measure the optical depth of the atmosphere. This is particularly useful for understanding the scattering properties of the molecules and particles that are present in the martian atmosphere. Happy Mars Monday!
Sol 2039 update by Rachel Kronyak: All eyes on "Red Cliff" (1 May 2018)
Following some fantastic preliminary imaging from yestersol, today's plan (Sol 2039) is dedicated to additional imaging of "Red Cliff" before continuing to drive toward a location where we think we are likely to drill. We have a short science block to start the day, during which we'll use Mastcam to take some context imaging of our surroundings and upcoming terrain. We'll then use the ChemCam RMI to extend our coverage of Red Cliff, similar to the black and white image above. These RMI images give us a really great opportunity to study small-scale stratigraphic details in rocks that are pretty far away from the rover.
Following our science block, we'll perform a drive and take our standard sequence of post-drive images to set us up for tomorrow. We'll take a dust devil movie with Navcam as well as a post-drive AEGIS observation to collect some preliminary geochemical information at our next location. We also have standard REMS and DAN activities to round out another great day on Mars!
Sol 2040 update by Ryan Anderson: Go West, Young Rover (3 May 2018)
Our drive from Sol 2039 was successful, and the plan for sol 2040 is to continue driving to the west. Before we do that, ChemCam will analyze the bedrock target "Prairie Lake" and the loose rock "Gowan". Mastcam will take a single image to document both targets, as well as an image of the autonomously-selected target observed after the sol 2039 drive. Mastcam also has a 9-frame mosaic of an interesting crack in the soil near the rover. The targeted science block will wrap up with a Navcam movie to watch for clouds over Mt. Sharp.
After the drive, in addition to our normal post-drive imaging, Mastcam will observe the sun and the crater rim to measure the amount of dust in the atmosphere. ChemCam will do another autonomously-selected observation and we'll wrap up the day with a MARDI image of the ground under our wheels.
Sol 2041 update by Michelle Minitti: mmmmmm….science (3 May 2018)
Curiosity continued her journey off of the "Vera Rubin Ridge," driving west along the ridge flank toward a passable route down to the bedrock north of the ridge. Her stop today may have been brief, but it was ehhhhhhxcellent. ChemCam will acquire ten spot rasters across "Homer Lake," a finely-layered bedrock block, and "Barto Lake," white sulfate vein material pasted to the side of the Homer Lake block. After ChemCam shoots Homer Lake and Barto Lake, Mastcam will collect multispectral data from both targets, giving Mastcam a view of the areas cleared of dust by the laser and providing complementary data to the ChemCam analyses. Mastcam will feel at home imaging "Terrace Point," a set of bedrock blocks with distinctive surface textures. Navcam will search for dust devils both before and after the drive.
The MAHLI and APXS teams did not have a cow about the lack of contact science in the plan, as the 25 m drive is aimed at a nice expanse of bedrock for the upcoming weekend plan. If the drive does not go as planned? D'oh!
Sol 2045 update by Abigail Fraeman: Purple Coleraine, Purple Coleraine (7 May 2018)
The drive planned on sol 2045 will take Curiosity off of Vera Rubin Ridge and back into the broken-up rocks that comprise the Blunt's Point member of the Murray formation. But don't panic Vera Rubin Ridge fans, we plan to climb back onto the ridge and head to points beyond after we get a chance to test the drill down in Blunt's Point.
We are planning to start the sol 2045 plan with a remote sensing science block that has several ChemCam observations and associated Mastcam documentation images. The targets are "Blackhoof," a vein with potential darker inclusions, and "Bovey," a red-hued rock in the work area. Also, since we're currently using names from Prince's home state of Minnesota, why not two purple ones: "Coleraine", a purple-hued rock in the work area and "Soudan," a specular purple rock next to Coleraine.
Sol 2046 update by Mark Salvatore: The best laid plans... (8 May 2018)
As Curiosity continues to descend the Vera Rubin Ridge, the science team is doing their best to characterize, for a second time, all of the structural, chemical, and spectral variations originally seen as we climbed up the ridge. Yesterday's drive brought Curiosity from the "Pettegrove Point" member of the VRR into the "Blunts Point" member, which is just below the ridge itself. So, the team was planning to spend a full day at this location to perform remote science investigations, to brush off a rock surface, to analyze the surface's chemistry with the APXS instrument, and to take some high-resolution oblique images to characterize the layering observed in the sides of the rocks. When the team woke up this morning and first saw the workspace in front of the rover, everyone was happy and eager to get to work!
However, a stroke of bad luck prevented the science team from performing most of these analyses. About half-way through planning this work, the science team got news that the rover was not only sitting at a rather steep angle (~17 degrees relative to horizontal), but that one of the wheels was also propped up on a loose rock. In order to play it safe and to minimize any risk that the rover would lose its balance when the arm was extended to perform many of these analyses, the rover planners and the science team decided to forego any arm activities and, instead, plan only a short science investigation and to "bump" to a nearby rock to try again tomorrow for a full surface characterization. While these decisions are momentarily disappointing, they are relatively frequent and necessary to ensure that Curiosity will be able to perform her job many years into the future. We certainly don't want to take any unnecessary risks!
So, instead of the plethora of science activities originally planned for the day, Curiosity will instead only make a handful of measurements before pivoting and driving a few meters away to the next location for tomorrow's attempt at surface science. Today, Curiosity will use the ChemCam instrument's laser-induced breakdown spectrometer to measure "Grand Lake," a block of the Blunts Point member that appears to have the typical properties seen earlier in the mission, as well as "Mud Lake," which is a piece of bedrock broken by Curiosity's wheels that revealed a bright brick-red color on its inside (the sunken rock in the middle of the following Hazcam image, wedged between the raised rocks: https://go.nasa.gov/2KLEawF). Mastcam will follow up with documentation images as well as a multispectral image of Mud Lake to see what sort of spectral and mineralogical variations are the cause of the bright red coloration. Curiosity will also perform several environmental monitoring measurements, including a search for dust devils and an atmospheric opacity observation. Following her short drive, Curiosity will then perform standard post-drive imaging in order to get ready for tomorrow's day of surface analyses.
Sol 2047 update by Scott Guzewich: Bump Take 2 (9 May 2018)
In Curiosity-speak, a "bump" is a short drive the rover performs to better position itself for a particular science investigation (often contact science with the rover's arm). Yestersol's plan intended to include such a bump to reach a suitable target for contact science, but unfortunately the drive did not execute. Today's planning aimed to recover this drive and reach a target for contact science in the next plan. You can see from this Hazcam image that the ground is full of bedrock plates and tilted rocks, one of which Curiosity is standing on, which prevented contact science at the current location. The image also shows the northern edge of the Vera Rubin Ridge (from the upper left corner of the image extending horizontally across the upper portion of the frame). Curiosity will continue to head northward away from the ridge (toward the right side of the image) to find a target suitable for drilling.
Today's science plan was necessarily limited and will include post-drive imaging, a dust devil movie, and routine REMS and DAN environmental monitoring.
Sol 2048 update by Ken Herkenhoff: Successful Bump (10 May 2018)
Today is the third and final day that I'm serving as SOWG Chair this week at JPL, and I was happy to see that the bump we originally planned for Sol 2046 completed successfully on Sol 2047, placing the rover in a good position for contact science on a couple of bright blocks in front of the rover. So we're planning to brush two targets on the larger block, named "Bilbert" and "Giants Range," before MAHLI images them and APXS measures their chemistry at night. Before the arm activities, ChemCam will shoot its laser at Giants Range and targets "Vermillion" and "Lac La Croix" on nearby blocks. Because the stowed arm partly blocks our view of the part of the arm workspace closest to the rover, we'll acquire a Navcam stereo pair and a single Left Mastcam color image of that area after the arm is deployed. These images will be useful in planning more contact science this weekend.
Sols 2049-2051 update by Lauren Edgar: Onward and northward (11 May 2018)
Curiosity is currently investigating the Blunts Point member of the Murray formation, and searching for a suitable location to drill in the near future. I was the SOWG Chair today, and we put together a busy weekend plan focused on wrapping up contact science at our current location and driving further north into the Blunts point member.
The plan starts with a ChemCam water adsorption experiment to look for seasonal variations in hydrogen in the soil at different times of day. On the first sol we also planned some juicy contact science: a MAHLI "dogs eye" image looking edge-on at the "Culver" target (seen in the above Mastcam image) to assess the relationship between veins and bedding, followed by DRT, MAHLI, and APXS on typical bedrock at the "Floodwood" target, and additional MAHLI and APXS on the "Carleton" target to look for variations in chemistry. Just as Curiosity wraps up the overnight APXS integration on "Floodwood," we'll put her back to work with another early morning ChemCam water adsorption observation. Around midday on the second sol we'll take several Mastcam multispectral images to document the Sols 2048-2049 DRT targets, along with a ChemCam passive sky observation and documentation images of the ChemCam targets. We'll also acquire ChemCam LIBS on the target "Mountain Iron" to assess the composition of dark nodules. The third sol is focused on a ~10 m drive to the north and post-drive imaging to prepare for contact science or bumping to a drill location next week. We were a bit tight on data volume in this plan due to some small downlink volumes lately, but hopefully by keeping our data appetite in check we'll be in good shape for the exciting activities coming up soon!
Sol 2052 update by Scott Guzewich: We've Been Here Before (14 May 2018)
We expected to start planning today examining a new location within arm's reach (or a very short drive's reach) of a possible location for our next drilling attempt, but instead found images like this. Rather than driving almost 11 meters, Curiosity only drove about 1/2 meter before stopping. So, we found ourselves looking at images of previous wheel tracks and contact science targets rather than a new location.
The priority for today was therefore to recover that drive, which left plenty of time for some additional targeted and untargeted science. This included ChemCam LIBS rasters of "Brownell" and "Mahtowa", additional Mastcam images of "Munger" and "Itasca", and a Navcam dust devil movie. Following the drive, Curiosity will conduct a ChemCam AEGIS activity and a longer version of a Navcam dust devil movie. We often schedule dust devil movies closer to midday, when dust devils are more common, but it's important to also observe at other times of day to understand their frequency and patterns.
Sol 2053 update by Rachel Kronyak: Bump to "Duluth" (15 May 2018)
A successful drive on Sol 2052 brought Curiosity within bumping distance of what will likely be our next intended drill target. The science team named this target "Duluth." Duluth is a beautifully exposed Murray formation block visible in the Navcam image above. From our current location, we have a really nice vantage point of both the top and sides of the Duluth block. Analyzing blocks that have this kind of 3-D expression gives us a great opportunity to assess the full architecture of the rock.
Today we planned Sol 2053, which includes a science block prior to our bump. In the science block, we'll acquire several ChemCam LIBS rasters on targets "Pine Mountain" and "Windigo," both of which are located on the Duluth block. We'll also take some Mastcam images of Duluth to document the ChemCam observations and to provide some additional context on the vertically exposed sides of the block.
ENV has a couple of observations in the plan as well, including DAN measurements and a dust devil survey with Navcam. After our bump, we'll take some post-drive images to set up for an exciting drilling campaign over the next several sols!
Planning Sol 2054 update by Abigail Fraeman: Duluth at our feet... er, wheels (16 May 2018)
Our sol 2054 plan was limited by a small morning downlink. Occasionally, the flight paths of the Mars orbiters over Gale Crater don't have favorable geometries for relays with Curiosity, and this means our data downlink passes are smaller than average. Today we received only 1.6 MB (Megabytes) of data at the start of our planning day. This was just enough to tell us the drive executed successfully and the rover was healthy, but not enough to include any new images from our current spot. We did get another (also small) downlink several hours into planning, which gave us the first view of our drill target smack in the middle of our workspace - a rock we are calling "Duluth."
Since we didn't have images available at the start of the planning day to choose science targets, we will spend most of sol 2054 completing "untargeted" activities. We will collect data from the ChemCam calibration target, take pictures of the sky with MAHLI (sky flats), snap a photo of the rover deck with Mastcam, and squeeze in one LIBS target that will be chosen autonomously by the rover using the AEGIS software. We will also make observations to characterize our environment and the dust in the atmosphere, including a Mastcam tau observation and images of the crater rim, and Navcam images of the sky and horizon.
We will also image Mars' moon Phobos passing in front of the sun around 8:30 in morning of sol 2055, before we handover to the new plan. We've taken Phobos transit images several times before (i.e. https://mars.nasa.gov/resources/4805/phobos-transit-viewed-by-opportunity-on-sol-3078/), and these data help us better constrain the orbit of this small, potato shaped moon.
Sol 2055 update by Roger Wiens: Drill Site Perspectives from a Duluth Native (18 May 2018)
I was excited to learn earlier this week that my native city was chosen as the name of the latest drill site on Mars! The name was selected by geologists on the mission to recognize the Duluth Complex, one of the largest intrusions of gabbro on Earth, along the north shore of Lake Superior. But, as the team likes one-word names, we are just calling the drill site "Duluth." The name was almost changed yesterday when it was realized that "Duluth" was already used for a ChemCam target on Sol 292. Normally we don't use names more than once, but the team decided an exception was warranted.
Duluth, my birth city, was at one time the busiest port in the United States in terms of gross tonnage, surpassing even New York for a while. It is still considered the largest freshwater port in the world even though it is one of the farthest inland, at 3770 km from the Atlantic Ocean. Duluth has one of the coolest climates in the US due to its proximity to the world's largest and one of the deepest freshwater lakes. The drill target "Duluth" on Mars was also once near the shore of a large freshwater lake. Its climate is also relatively cool, so the name is apropos.
The Curiosity rover is commencing its drill sequence with a full suite of contact science characterizations today. It will start with a touch of the target by the arm just off to the side of the planned drill site (documented by Hazcam and Navcam), then an APXS observation and then MAHLI observations of the "Duluth" target at 25 cm. After that there will be a pre-load drill test, which will be documented by the imagers. MAHLI will image the site at 35 cm along with imaging the location where the arm did its touch. The Dust Removal Tool (DRT) will brush the target, after which Mastcam will inspect the brush and the brushed surface, and MAHLI will document the brushed target at 25, 5, and 1-2 cm distances. The 5 cm distance will support a stereo pair of images. APXS will be placed for an overnight observation of the target. Navcam and Hazcam will document most of the arm instrument positions over the course of the day. Mastcam will take a Phobos transit video near sunset. RAD, REMS, and DAN will monitor the environment in the background. If all goes well, the uplink team will work on the drilling commands tomorrow.
Sols 2056-2058 update by Michelle Minitti: Poised (21 May 2018)
This weekend, Curiosity will attempt to sink the drill into the complexly-layered "Duluth" block. Before that, she will gather more data from the "Blunts Point" member rocks in front of and around us. The Duluth target, neatly cleared of dust by the DRT in yesterday's plan, will be observed by ChemCam's passive mode and Mastcam's multispectral mode to gauge what iron mineralogy was hiding beneath the target's thin veneer of dust. ChemCam will shoot three targets to learn more about the chemistry of the layers within the Duluth block and similar blocks around it. Within the Duluth block, ChemCam will target "Chisholm," the delicate layer curling up above the top of the Duluth block, and "Aitkin," another layer jutting out from the side of the block. The "Buhl" target sits off to the rover's right and represents another example of the Blunts Point member for ChemCam to sample. Mastcam will then image two large blocks dubbed "Kabetogama" to learn more about the intricate layering of the Blunts Point member. Before drilling, Curiosity will also give the sky some attention. Images and movies acquired in the early morning will measure dust and look for clouds, while images and movies at mid-day will measure dust and look for dust devils. REMS and RAD will gather data regularly as the weekend progresses.
The second sol is the centerpiece of the plan, when we attempt to sink the drill into the Duluth block. Before drilling, MAHLI will capture "before" images of the drill target, and MAHLI and Mastcam will image the areas where different portions of a drill sample could be dumped both before and after sample delivery to SAM and CheMin. Then, drilling commences. Once the drill hole is created, ChemCam will image the hole with its RMI to set up for shooting the laser down the drill hole in subsequent sols, and Mastcam and Navcam will image the post-drill workspace.
The engineers have worked incredibly hard to invent a new way to use the drill, as highlighted in this recent story. Their ability to work around the problem from afar and give us another chance at drilling is very much in the spirit of NASA's engineers designing fixes to the systems of Apollo 13 as the spacecraft hurtled, crippled, to the Moon. Although the stakes are different for MSL, the ingenuity is the same. The science team has been wondering what minerals might be responsible for the layers, veins and nodules in the Blunts Point rocks. A successful drill will mark the first step in answering that mystery. Suffice it to say, the whole MSL team - scientists and engineers - will be waiting with bated breath for the data that reveal if the drilling was successful. Success will feel very much like *finally* getting to open that shiny birthday present after a long, enticing wait!
Good luck, Curiosity!
Sol 2059-2060 update by Mark Salvatore: Characterizing a Successful Drill! (23 May 2018)
This past weekend, Curiosity successfully drilled into the "Duluth" rock target, generating a beautiful pile of drill tailings! This is a very exciting time for us on the rover team, who have been waiting for quite a while to successfully drill into a target and to ingest samples into the rover's analytical instruments. Before we are able to use all of our instruments, however, we must first characterize the nature of the materials that were collected during the drill activities. So, on Monday, the science team planned for the characterization of three small portions of the collected sample that were to be dropped onto the surface in front of us so that we could image these materials at high resolution. While these efforts were not primarily driven by science (the rover engineers were more interested in the nature of the sample and whether there would be any difficulties in delivering the sample to Curiosity's instruments), the science team didn't dare miss an opportunity to make some cool measurements of the new materials in front of us!
First up in Monday's plan was multispectral imaging of the drill target and some regular visible imaging of a small patch of sand ripples named "Esko." The drill target observation was requested to help determine how the interior of the Duluth target differs from its surface, while the imaging of Esko was used to see if there is any motion of the Esko ripples over time. ChemCam was then used to passively image the drill hole, and then to actively characterize the chemistry of the drill hole and drill tailings using its laser instrument. Mastcam and ChemCam imaging capabilities were also used to acquire high-resolution images of the small test portions throughout the plan. The next day's science plan had two Mastcam observations - one of the small portions and one of the Esko ripples - both of which were designed to identify whether the wind had modified these surfaces at all. Environmental measurements were also made on the second day to search for both cloud motion and dust devils.
We're all very excited to continue on with drill activities and to make some long awaited measurements. Stay tuned for more updates as the week progresses!
{kind=link}
{kind=link}
{kind=link}
Sols 2061-2062 update by Lauren Edgar: Time to feed CheMin (23 May 2018)
After successfully drilling the "Duluth" target on Sol 2057 (as seen in the above Mastcam image), the science team is eager to find out what it's made of. As SOWG Chair today, it was exciting to plan the drop-off of material to CheMin and overnight CheMin analysis. Hopefully we'll get some good data about the mineralogy of this sample!
In addition to the CheMin activities, the team planned another ChemCam observation of the "Duluth" drill hole, and nearby bedrock and vein targets named "Prosit" and "Grand Marais." On Monday we delivered three portions of the drill material to a nearby rock surface, and in today's plan we're monitoring those piles to see if any of the fines are moving in the wind. We'll also check for changes in a sandy ripple named "Esko." Both change detection observations will be repeated on the second sol, along with a Mastcam mosaic to provide more context for this drill location. The environmental theme group also planned a couple of Navcam dust devil observations, a Mastcam tau, and a Mastcam crater rim extinction activity to monitor dust in the atmosphere.
Looking forward to finding out what this rock is made of!
Sol 2063-2066 update by Ken Herkenhoff: Sample drop-off testing (25 May 2018)
Some of the Duluth drill sample was dropped into CheMin on Sol 2061, but not enough for a proper mineralogical analysis. So the top priority for today's plan is to again test the new drop-off procedure. Since the drill feed mechanism became unreliable over a year ago, drill samples can no longer be sieved and processed in CHIMRA, as they were earlier in the mission. Instead, portions of the sample must be dropped from the tip of the drill directly into the analytical instruments. This new Feed-Extended Sample Transfer (FEST) procedure will be repeated on Sol 2064, over bedrock and over the closed SAM inlet cover. Mastcam images will be taken both before and after the drop-off in both locations, to allow the size of the sample portion to be estimated. The results of these tests will be used to inform future drop-off planning.
We're planning 4 sols today so that the tactical operations team can take a day off for the Memorial Day holiday. More change detection observations are scattered throughout the plan, with Right Mastcam images of dark sand ripples at "Noodle Lake" and the Duluth drill tailings on Sol 2063 at 11:00, 15:00 and 17:00, on Sol 2064 at 7:00 and noon, and on Sol 2065 at 7:00, ~11:00, noon, and 15:00. The goal of these observations is to constrain the frequency of wind gusts that are strong enough to move loose material. The Rover Planners also requested multiple Right Mastcam images of the sample drop-off location on nearby bedrock for the same purpose; these are scheduled in the afternoons of Sols 2063, 2065, and 2066. ChemCam will also be busy this weekend, measuring the chemistry of a bumpy bedrock target named "Brule Mountain" and layered bedrock targets "Devil Track" and "Devilfish Tower" on Sol 2063. The latter two targets will be captured in a single Right Mastcam image soon afterward. On Sol 2064, ChemCam will observe some pebbles dubbed "Paupores" and Right Mastcam will acquire a single image covering both Brule Mountain and Paupores. Early on Sol 2065, Mastcam and Navcam will measure the amount of dust in the atmosphere, and Navcam will search for clouds. Later that morning, Right Mastcam will take a picture of a nearby bedrock block dubbed "Deerwood." In the afternoon, Mastcam will image the Sun and sky to measure the scattering properties and size distribution of dust in the atmosphere over Gale Crater, with supporting Navcam imaging.
Sol 2067 update by Claire Newman: 'Tis the Season to be Dusty. (30 May 2018)
The previous plan included some tests of the sample delivery system, including delivery of a single portion to the closed cover of the SAM inlet. The imaging showed a small amount made it, but not as much as we'd hoped. So the team decided to postpone CheMin sample delivery until tomorrow's plan, leaving us even more time for science activities in today's single sol plan for Sol 2067.
The environmental theme group seized the opportunity to take a long 'dust devil search' movie pointed roughly to the northwest, where we currently have a beautiful view back down the slope of Aeolis Mons toward the Bagnold Dunes, and all the way across Gale Crater's floor to the northwest rim (as shown in this Navcam image from Sol 2060). We've just moved past southern spring equinox, which means we're now in the half of the Mars year when global dust storms are observed to begin. However, the increased surface heating as we head for the warmest time of year should also produce a peak in convective activity and hence in dust-filled vortices known as dust devils. We've already seen a lot this Mars year in our location higher up the slope, so we're hoping for a bumper crop in spring and summer! The ENV theme group also added a long 360° dust devil survey and cloud movie as well as the usual REMS and DAN activities.
On the geology side, following our haul of change detection images over the weekend, we continued to look for surface changes on the Duluth drill tailings and on target "Noodle Lake" that has loose material sitting on the bedrock. The purpose of these experiments is to help us figure out the wind direction and its relative strength at this location, which may help to explain some of the sampling issues (e.g. if the sample is being blown away as it drops). ChemCam also made measurements on "Sawtooth Bluff," a gray, thin alteration layer raised above the bedrock surface, repeating measurements made previously on the nearby "Grand Marais" target, and on "Gary," a raised ridge feature, as well as taking two long-distance RMI images of the "Red Cliff" target as part of an engineering test.
Sols 2068-2069 update by Claire Newman: Triple delivery for CheMin (31 May 2018)
We're looking forward to analyzing some great drill samples from the "Duluth" rock target in Curiosity's Chemistry and Mineralogy instrument, CheMin. However, previous tests on Mars and the first delivery attempt to CheMin raised a concern that less material than expected may be making it in. To increase the chances of a successful CheMin analysis this time around, three portions will be delivered in Sol 2068 instead of the usual single portion, and from a smaller height than before.
In addition to the CheMin triple delivery, the geology theme group planned some passive imaging of target "Bassett" by ChemCam. This is exposed Murray formation bedrock, so the purpose is to compare its chemical composition with other Murray targets and get a sense of their variability. Also included were Mastcam stereo images of targets "Anderson Lake," "Bob Lake," "Toohey Lake," and "Bass Lake" to better understand the bedding geometry. The GEO theme group also included more Mastcam change detection images of the Duluth drill tailings and "Noodle Lake" target, to monitor how rapidly and in what direction the Martian wind is moving loose material on the surface.
The environmental theme group planned two early morning Navcam cloud movies on Sol 2069 less than an hour after sunrise. The cooler early morning is now the best time to see clouds, as we move well past the 'cloudy' season and into the warmer half of the year. These movies were followed by Mastcam images of the sky and crater rim, which respectively allow us to measure the opacity of the atmospheric column above the rover and the line-of-sight extinction across the crater horizontally. The air can be pretty dusty inside the crater, reducing visibility, even when no storms are raging, as shown in this Mastcam crater rim image from Sol 2065. The ENV theme group also took another long Navcam dust devil movie, this time looking more to the northeast, as well as a shorter movie looking to the northwest and another Navcam dust devil survey, with the two movies covered nicely by two hours of extended REMS meteorological measurements. Such overlap is ideal, because rapid pressure drops measured with REMS - which indicate a convective vortex (dusty or not!) passing nearby - can then be correlated with any dust devils we spot in the movies. This tells us something about how intense vortex activity has to be to raise dust and make vortices visible as dust devils. And on the rare occasions when we can connect a REMS pressure drop to a specific dust devil, we can use this to learn more about the dust devil's size and speed.
Sol 2070 - 2072 update by Abigail Fraeman: A very, Very, VERY good day on Mars (4 Jun 2018)
Every single day that the Curiosity team gets to go into work and operate a one-ton rover on the surface of Mars is a good day. But last Friday was not just your typical good day -- it was a very, very, very good day. In my personal opinion, it was probably one of the top five most excellent planning days we've had on the mission to date. Early Friday morning we learned that the Feed Extended Sample Transfer (FEST) drop-off of the "Duluth" drill sample to CheMin worked. This means we had enough rock powder in the instrument to measure its mineralogy.
Most importantly, now that we've demonstrated this critical step on Mars, the team can officially say that Curiosity's drilling and sample transfer capabilities have been restored. This represents a huge accomplishment for the tireless engineers who've worked over a year to learn to operate the vehicle in a way it was never designed to work. It's also an extremely exciting time for the science team, as we are eager to learn the key information CheMin and SAM will provide and further unravel the history of Gale Crater. The scientists and engineers at JPL celebrated this accomplishment with a joyous afternoon cookie break.
We will continue our Duluth drill sample analysis activities in the sol 2070-2072 plan. Since we now know we have successfully delivered to CheMin, SAM is up next. Our main activity for the weekend plan was a preconditioning of SAM and the sample dropoff using the FEST technique. We also squeezed in some remote sensing science of our local area. On sol 2070 we planned to acquire ChemCam LIBS observations of targets named "Little Marais" and "Bartlett," and a Mastcam change detection image of an area where we dropped a previous portion of the drill sample on the ground. We also planned to take a Mastcam tau (dust monitoring) observation on sol 2070, followed up with a Navcam dust devil movie, dust devil survey, and suprahorizon and zenith movies on sol 2071.
Sol 2072 update by Abigail Fraeman: The Great Martian Bake Off (5 Jun 2018)
We received confirmation that the "Duluth" drill sample was delivered to SAM this weekend, so we're ready to run our evolved gas analysis (EGA) tosol! An EGA basically involves baking the powdered rock sample in a several hundred degree oven, and then measuring the amount and composition of gases that are liberated. Since running the oven requires so much power, we didn't have the resources to do a whole lot of additional activities in the sol 2072 plan. We did manage to fit in two science blocks that include a ChemCam observation of the target "Bartlett" (we missed acquiring this in the weekend, so will try again), a Navcam dust devil movie, a tau (atmospheric dust) observation, a Mastcam change detection image of the drill taillings pile, and Mastcam 360 degree mosaic to provide color context for the drill sample location.
Sol 2073 update by Ken Herkenhoff: Another CheMin Analysis (5 Jun 2018)
The focus of MSL operations continues to be on the analysis of the Duluth drill sample. The latest SAM EGA was scheduled for the evening of Sol 2072, so the results of that analysis have not been received yet. Both SAM and CheMin analyses require significant power, and can therefore not typically be scheduled on the same day. So today it's CheMin's turn to analyze the the Duluth sample again, to improve the statistics of the X-ray diffraction measurements. The uplink team was also able to squeeze in a few daytime observations before the overnight CheMin analysis: Right Mastcam images of Noodle Lake, the Duluth drill tailings, and the portion drop area to look for changes due to winds, Mastcam images of the Sun to measure dust opacity, and a Navcam zenith movie to look for clouds. These observations should be helpful in determining the frequency, strength, and direction of winds near the surface and high above the rover. Such information will be very useful if the science team decides to drop another sample portion into either CheMin or SAM using the new sample transfer technique, as high winds can disperse the portion before it makes it into the instruments.
Sol 2074 update by Scott Guzewich: And the Crowd Went Wild (6 Jun 2018)
Today we received the happy news that the SAM instrument received enough sample to conduct its "evolved gas" analysis of the powdered rock from our "Duluth" drill hole! This will allow the team to study the composition of "Duluth" and search for clues about the habitability of Gale Crater billions of years ago. It also fully validates the new sample drop off routines that were created to work with our new "feed-extended drilling" technique.
After a busy several sols where Curiosity's onboard laboratories got back in action, the plan today was relatively quiet with ChemCam LIBS analysis of rock targets "Little Marais" and "Independence", and some housekeeping activities from SAM following its investigations two sols ago.
The environmental science theme group is monitoring a growing large dust storm on the other side of Mars. To help keep tabs on if and when this storm begins to impact Gale Crater, we added two observations with Mastcam to monitor the amount of dust in the atmosphere and a short Navcam dust devil survey. We expect that even if the storm dissipates before becoming a global dust storm, that the amount of dust in Gale will increase over the next several days and this view of the crater's rim will become far hazier.
Sol 2075 update by Rachel Kronyak: It's a SAMple party! (7 Jun 2018)
Today, Sol 2075, was a fairly straightforward day of planning, as most of the plan will be devoted to carrying out a methane experiment with our SAM instrument to analyze an atmospheric sample. On the plus side, we were able to squeeze in about 45 minutes of additional science block time, which was split between our Environmental (ENV) and Geologic (GEO) theme groups. ENV will perform several atmospheric monitoring activities to assess dust opacity with Navcam and Mastcam, including a few line-of-sight images and a tau measurement. ENV will also take a series of images with Navcam to look for dust devils as well as a deck monitoring image with Mastcam.
GEO planned a ChemCam LIBS observation on the nodular target "Little Marais," which is seen in the RMI image above. We analyzed Little Marais on Sol 2074 and are carrying out an additional LIBS observation in today's plan to help us further characterize the chemistry of this interesting feature. ChemCam will also take an RMI image of the Duluth drill hole, which will help us plan additional drill hole targeting over the weekend.
Sol 2076-2078 update by Rachel Kronyak: Dust on the horizon (8 Jun 2018)
Today we planned a weekend's worth of activities for Curiosity. For our weekend plan, we have two main priorities: perform another analysis with CheMin on our Duluth drill sample and continue our campaign of dust storm monitoring.
Earlier in the week, our environmental science theme group (ENV) expert Scott Guzewich gave a nice summary of the dust storm developing on the other side of Mars. In response, the ENV group planned a suite of activities to monitor how the amount of dust in the atmosphere will change over the next few sols. To measure dust in the atmosphere, we'll first point Mastcam towards the sun and take a tau measurement, which lets us determine the optical depth vertically. Then we'll take a Mastcam image of the crater rim to determine line-of-sight extinction, which is directly related to the amount of dust present. ENV will also take a few movies with Navcam to assess clouds, wind direction, and to look for dust devils.
Overnight on Sol 2076-2077, we'll perform our third CheMin analysis on the Duluth drill sample. Our geology theme group (GEO) planned some additional activities later in the day on Sol 2077 to support our assessment of the Duluth drill hole, including a ChemCam LIBS raster of the drill hole and several change detection Mastcam images. Whenever Curiosity is parked at a location for more than a few sols, we commonly take a series of these change detection images to systematically look for material that has moved. We'll also do a LIBS observation on the nearby rock target "Isanti" and perform a routine check-up on the Mastcam instrument with a sky column observation.
Sol 2079 update by Michelle Minitti: Quick change artist (11 Jun 2018)
Over the weekend, an error cropped up during a regular test of the high gain antenna actuators, leaving the antenna unavailable for uplink of today's plan, but otherwise healthy. The team instead will use Mars Reconnaissance Orbiter (MRO) to uplink a brief suite of activities to the rover, including the commands to recover the high gain antenna for use tomorrow. The MRO uplink window is hours later than our usual HGA uplink window, so with less time in the plan, we had to postpone our drill-related activities until tomorrow's plan. We did get confirmation that we are ready for the next step of drill-related activities: dumping the "Duluth" sample for analysis by APXS, MAHLI, ChemCam and Mastcam. For today, the high-priority activities that were included in the plan focused on monitoring the changing conditions associated with the ever-growing dust storm on Mars. Mastcam will measure the dust load in the atmosphere, and image two areas, "Noodle Lake" and a spot where a test Duluth sample portion was dropped, to look for wind-induced changes. Regular REMS measurements will give us the data we need for weather reports as the storm builds.
Sol 2080 update by Roger Wiens: Communication Back to Normal (12 Jun 2018)
On Earth we have multiple means of communication-cell phone, text messages, land line, e-mail, and good old snail mail. On Mars the rover basically has three-a UHF antenna that communicates with satellites orbiting Mars, a low-gain antenna (LGA) that does not need to be pointed but only handles a low data flow, and a high-gain antenna (HGA) that requires accurate knowledge of Earth's position to receive or send commands directly. The two antennae on the left side of the rover are shown in the image above, taken early in the mission. The LGA is the pointy object near the left, and the HGA is the paddle-shaped object near the center of the image. The UHF antenna (not shown) is a can-shaped object on the back right side of the rover. Over the weekend the HGA was left unavailable to receive commands due to an error during a test, so the team had to do the next best thing yestersol, skipping most of the normal plan in order to reset the HGA-a bit like someone on Earth having to resort to a text message on an intermittent cell connection when an hours-long conversation was desired. As of today, it looks like Curiosity is back on track with normal communications.
Just to continue the discussion, on the downlink side, thanks to the combination of the HGA, orbiting satellites, and the Deep Space Network on Earth, we have received an average of about 60 megabytes of data each day from Curiosity over the last several years. We take that data link for granted when all is working well!
Back on the ground, Curiosity is resuming its drill-related activities with the plan to dump the tailings that are remaining in the drill. The sample dump is scheduled to take place in the early afternoon. Afterwards, the dump pile will be observed by Mastcam and MAHLI, and APXS will do an overnight integration on the pile. These analyses allow the rover team to determine the chemical composition of the drill material for comparison with the mineral composition obtained by CheMin. Having both chemical and mineral compositions helps us understand the origin of the rock and the conditions prevailing at the time of its formation much better than one data set by itself. Also happening during the day: ChemCam will shoot a couple of unrelated targets, "Robinson Lake" (nearby pebbles) and "Tofte" (a vein), both of which will also be observed by Mastcam. Imagers will also perform observations looking for dust devils and day-to-day changes in the nearby surface, as well as viewing the sky and the crater rim to characterize the increasing haze due to the dust storm. Observations of the environment by REMS, RAD, and DAN will continue.
Sol 2081 update by Roger Wiens: "Just a Bunch of Dirt" (13 Jun 2018)
The final several sols of Curiosity's drill activities at "Duluth" are devoted mostly to imaging and to analysis of the pile of drill tailings that are dumped on the ground after the delivery to the instruments.
Some people think dirt is uninteresting. Shortly after the Curiosity rover landed in 2012 I was asked to give a special talk to a very distinguished group of people. The slides had to be prepared a couple of weeks in advance and were sent from my director's office to be reviewed by handlers in the state where I was to give the talk. Those first days of the mission were breathtaking, and my presentation included the video of the landing, taken from the MARDI camera, mounted on belly of the rover, as it descended. In that scene, the dust gets kicked up by the sky crane's rocket engines as the rover nears the ground, and eventually the picture becomes rather dark as the rover's shadow covers the ground, but the first precious glimpse of a few pebbles can be made out, signaling a safe landing on an exciting new terrain!
I was in the middle of operations a couple of days after submitting the presentation when I noticed that I had just missed multiple phone calls. It turns out that the handler didn't like some parts of my presentation. Word was passed on to administrators at my institution: "You have to get rid of that video--it just shows a bunch of dirt!" I got on the phone and calmly explained that the offending sequence was in fact the very first Mars-landing video. My manager nearly fell off his chair laughing when he learned what it was. The person who didn't like the landing video probably would have equally disliked (or mistaken) a video of the first Moon landing, which also set down on "just a bunch of dirt."
Tosol Curiosity's "bunch of dirt" is the dump pile consisting of drill tailings as seen in the MAHLI image above (roughly 16.3 by 12.2 cm in dimensions), and the tailings bunched around the drill hole itself. The rover starts its science activities with Mastcam and ChemCam passive multispectral observations of the dump pile, and Mastcam and ChemCam active interrogation of target "Elbow Creek" (a vein). The arm then moves MAHLI into position to get 25 and 5 cm close-ups of the drill hole and the surrounding tailings. In the evening MAHLI gets turned on again to do nighttime imaging of the CheMin inlet on the deck of the rover, and then it goes back to the surface for nighttime imaging of the drill hole. After that, APXS is placed in position on the dump pile for an overnight integration. In between these activities the rover will continue observing the dust and surroundings: Mastcam continues a change-detection series of daily observations of the nearby surface, as well as looking at the observation tray and getting a view out to the crater rim. RAD, DAN, and REMS continue their daily investigations, as usual.
Sol 2082 update by Ken Herkenhoff: A New MAHLI selfie (14 Jun 2018)
The investigation of the Duluth drill hole is going well, and is expected to continue on Sol 2082. First, MAHLI will take a picture of the drill tailings to look for an imprint of the APXS contact sensor, then will acquire another rover "selfie." The major dust storm that caused the solar-powered Opportunity rover, on the other side of Mars, to shut down has somewhat darkened the skies over Gale Crater, but is not expected to seriously affect MSL operations. Still, there is great interest in the environmental effects of the dust storm, so the Sol 2082 plan includes more Navcam and Mastcam observations of atmospheric dust and Right Mastcam images intended to detect changes due to winds. ChemCam will also measure the elemental chemistry of the material in the sample dump pile, if the wind hasn't blown the pile away by then! Finally, MAHLI will take images of the calibration targets on the front of the rover to monitor camera performance.
Sols 2083-2085 update by Christopher Edwards: 30 Sols and Done (18 Jun 2018)
The last time Curiosity drove anywhere was 30 martian days ago. A lot has happened in these past 30 sols. The rover got its groove back and successfully carried out a feed extended percussion drill activity and delivered drilled rock powder samples to the analytical instruments internal to the rover. These two instruments are the CheMin X-Ray Diffractometer and the SAM mass spectrometer/gas chromatograph/tunable laser spectrometer suite, which have been without fresh samples to analyze for months. Of course over the time while the drill was inoperable, Curiosity still carried out some fantastic scientific investigations examining the nature of the Vera Rubin Ridge. With its newly resurrected drilling capabilities, Curiosity will do one last pass over the Vera Rubin Ridge units, now that the rest of the instrument suite onboard can have access to this and future drill samples.
After completing the last little bit of drill related activities designed to characterize the sampling site in detail, Curiosity will hit the road on the second sol of this three sol plan. However, the rover won't be driving very far due to the rough terrain, only around 13 meters. We'll carry out the usual suite of imaging at this site following the drive to make sure we can acquire the needed data to support contact science in the next plan. In the coming months, Curiosity will end its stint on the Vera Rubin Ridge and continue up Mt. Sharp.
Sol 2086 update by Scott Guzewich: Dusty Skies (20 Jun 2018)
The dust storm that is challenging Opportunity closed in on Gale Crater over the weekend with a substantial increase in dust levels. The storm is no threat to nuclear-powered Curiosity and provides an amazing chance for new science. This is the first chance to take surface meteorological measurements from inside such a large dust storm. Two sols ago, this was the murky view from Navcam looking behind the rover and the amount of dust increased even more as of yestersol.
Today's plan features a wide range of observations to study the storm as part of our "dust storm campaign" including a Navcam dust devil survey, suprahorizon movie, and a zenith movie. We're also testing how quickly the amount of dust varies by doing a pair of Navcam line-of-sight dust measurements 15 minutes apart and two Mastcam "tau" measurements 1 hour and 30 minutes apart. Lastly, we scheduled a Mastcam "sky survey" to understand the properties of the dust particles themselves by way of how they scatter sunlight.
Aside from storm-related activities, the GEO working group targeted some remote-sensing observations of "Young Lake" and "Bass Lake" with ChemCam and Mastcam and then we'll drive away from this location.
Sol 2087 update by Michelle Minitti: Slippery slope (19 Jun 2018)
Curiosity pulled away from the "Duluth" site yesterday, but given the blocky nature of the "Blunts Point" member and the sand in between those blocks, she did not get far. The drive stopped after only ~8 m, so the rover planners will give it another try today, slightly rejiggering the drive planned yesterday to move among the rocks on the slope back up to the top of the "Vera Rubin Ridge." The rover was left perched a bit awkwardly on a loose rock and some sand, so contact science was not possible before the drive. Instead, we shot "Ambridge" with ChemCam, a rock broken by the wheels on our drive down to Duluth. We previously acquired a Mastcam multispectral observation on Ambridge from our Duluth parking position; the new ChemCam data will complement the Mastcam data nicely. After the drive, ChemCam will shoot a target autonomously-selected by the AEGIS system. We dedicated a lot of time in the plan to imaging the sky to keep tabs on the ever-changing conditions wrought on us by the current dust storm. In the morning, mid-afternoon and late afternoon, Mastcam will acquire images to measure atmospheric opacity, looking for changes over just a few hours. Navcam will acquire an image to measure atmospheric opacity, and a movie looking for dust devils. Regular REMS and RAD, and both DAN passive and post-drive DAN active measurements round out the activities for the sol.
Sols 2088-2089 update by Mark Salvatore: A Dusty Day on Mars (20 Jun 2018)
Over the past week or so, Curiosity has experienced increasingly dusty conditions in Gale crater. Unlike her older cousin Opportunity on the other side of the planet, Curiosity is not solar powered and, therefore, doesn't suffer from the same power issues resulting from the darkening skies that Opportunity does. That allows Curiosity to play more of an active role in monitoring this dust storm from the ground and collecting important information to help scientists understand the evolution of such a weather phenomenon.
After an unexpectedly short drive on Sol 2086 due to some "slippery" ground conditions, we again had a very short drive in the Sol 2087 plan due to additional wheel slippage. In fact, Curiosity only recorded a drive of 17 millimeters, or about half an inch! Needless to say, the landscape today looks pretty similar to the landscape we saw yesterday...
The science team did a great job in taking advantage of this familiar landscape by planning several new measurements. ChemCam will use its LIBS capabilities to analyze targets named "Beaver Bay," "Moose Mountain," and "Breakwater," while Mastcam and Navcam will dedicate their efforts primarily towards documenting these ChemCam targets and making environmental observations. The plan is to then drive away from this location heading south back up the Vera Rubin Ridge. Following the drive, we will make some additional environmental measurements and acquire our standard post-drive observations in preparation for our next day of planning on Friday.
One really cool observation that will be made in today's science plan is a ChemCam LIBS observation of... well... THIN AIR! The idea is to target the ChemCam laser into the dusty martian air. By observing the amount of dispersion of the laser pulse, the team will be able to make some really cool observations and estimations of atmospheric dust abundances. This is equivalent to shining a laser pointer into the sky during a foggy day, or in a dusty classroom. It's a new tool available to Curiosity thanks to some really ingenious planning by the scientists and engineers, and today is the first day that we will make this observation, so stay tuned!
Like overcast days here on Earth, there are very few shadows currently observed in Gale crater when the sun is overhead. The red martian dust in the atmosphere is scattering nearly all observed sunlight, creating dim and diffuse conditions. Check out the differences between these Mastcam images of the Duluth drill hole on Sol 2078 and Sol 2084. It's clear that the amount of color contrast has decreased significantly as the air has become redder and sunlight is scattered more and more. We'll continue to monitor the amount of atmospheric scattering as the dust storm evolves over the next few weeks. Stay tuned!
Sols 2090-2092 update by Ryan Anderson: Watch the Skies (26 Jun 2018)
Despite the global dust storm (more correctly known as a "planet encircling dust event") darkening the skies, our nuclear-powered rover continues to do good science. The sol 2090 plan begins with the first of several Navcam observations of the dusty atmosphere over the weekend, followed by ChemCam observations of the targets "Caribou Lake," "Simar,"and "Arlberg". ChemCam also will image the target "Young Lake" again. Mastcam will take individual pictures of the ChemCam targets on Arlberg and Caribou Lake, plus small stereo mosaics of Simar and "Hawk Ridge" to help measure the orientation of the veins and layers seen there. Mastcam will then make some observations of the sun and the distant crater rim to measure the dust in the atmosphere and MARDI will take an image of the ground underneath the rover. Later in the afternoon on sol 2090, Mastcam will take some images of MAHLI to make sure it isn't getting too dusty. APXS will then make two measurements: one on "Hunter Lake" and another on Caribou Lake.
On Sol 2091, we start first thing in the morning with Mastcam and Navcam atmospheric measurements of dust and searches for clouds. Later in the morning, we'll repeat some of the dust observations and Mastcam will take pictures of "Clappers," Hunter Lake, and Caribou Lake.
On Sol 2092 SAM will make a measurement of the atmospheric composition, and then Navcam will measure the dust in the atmosphere before we drive. The drive should go about 28 meters, heading back up the slope toward the top of Vera Rubin Ridge. After the drive, Mastcam will make another round of atmospheric dust measurements plus normal post-drive imaging, including a documentation image of the ground near the rover. MARDI will also take a documentation image.
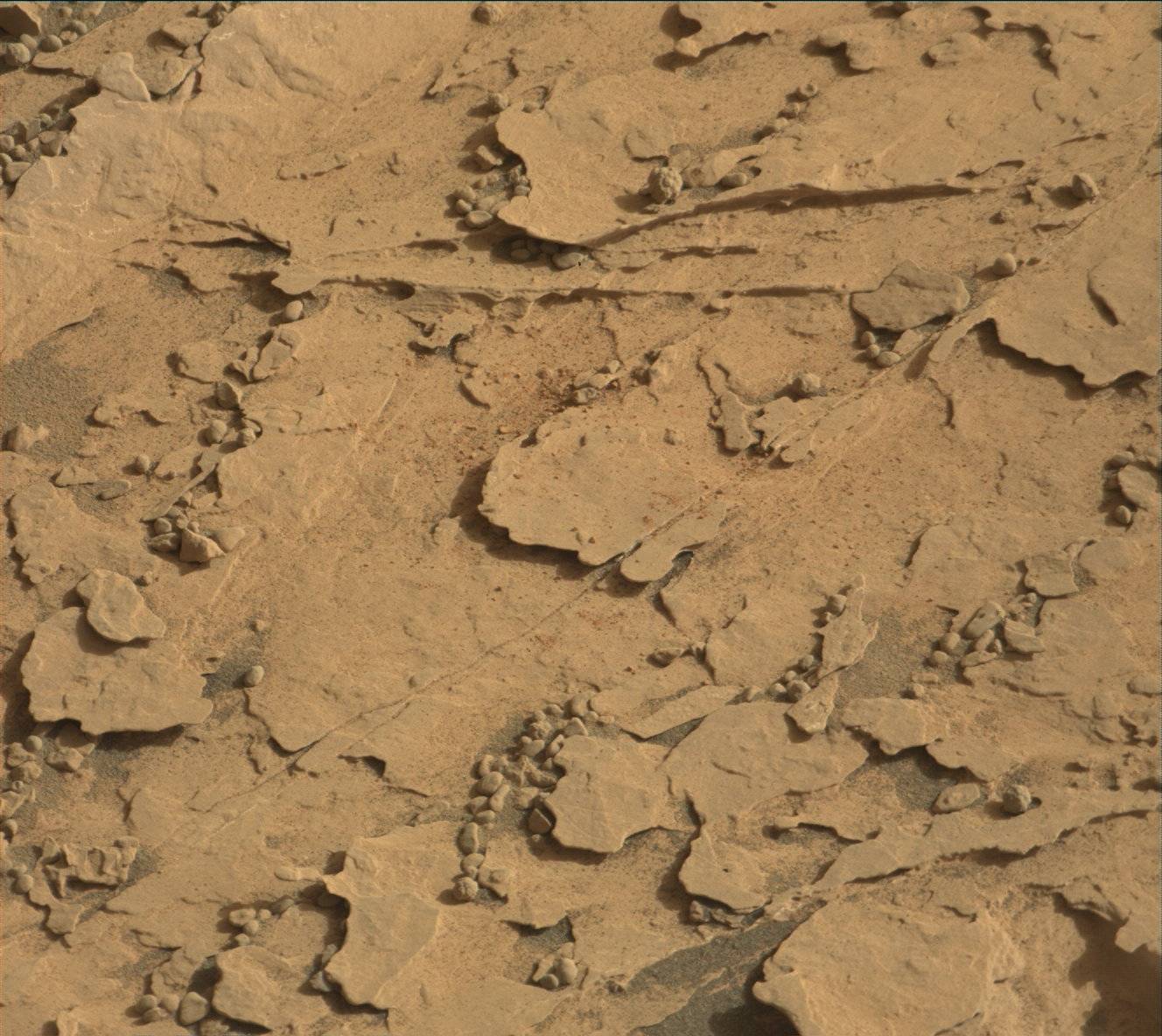{kind=link}
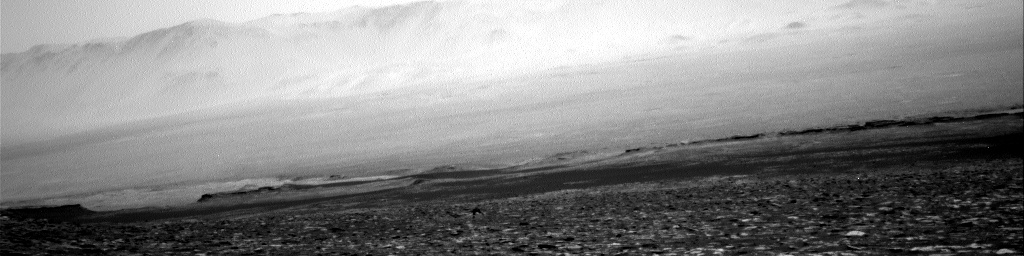{kind=link}
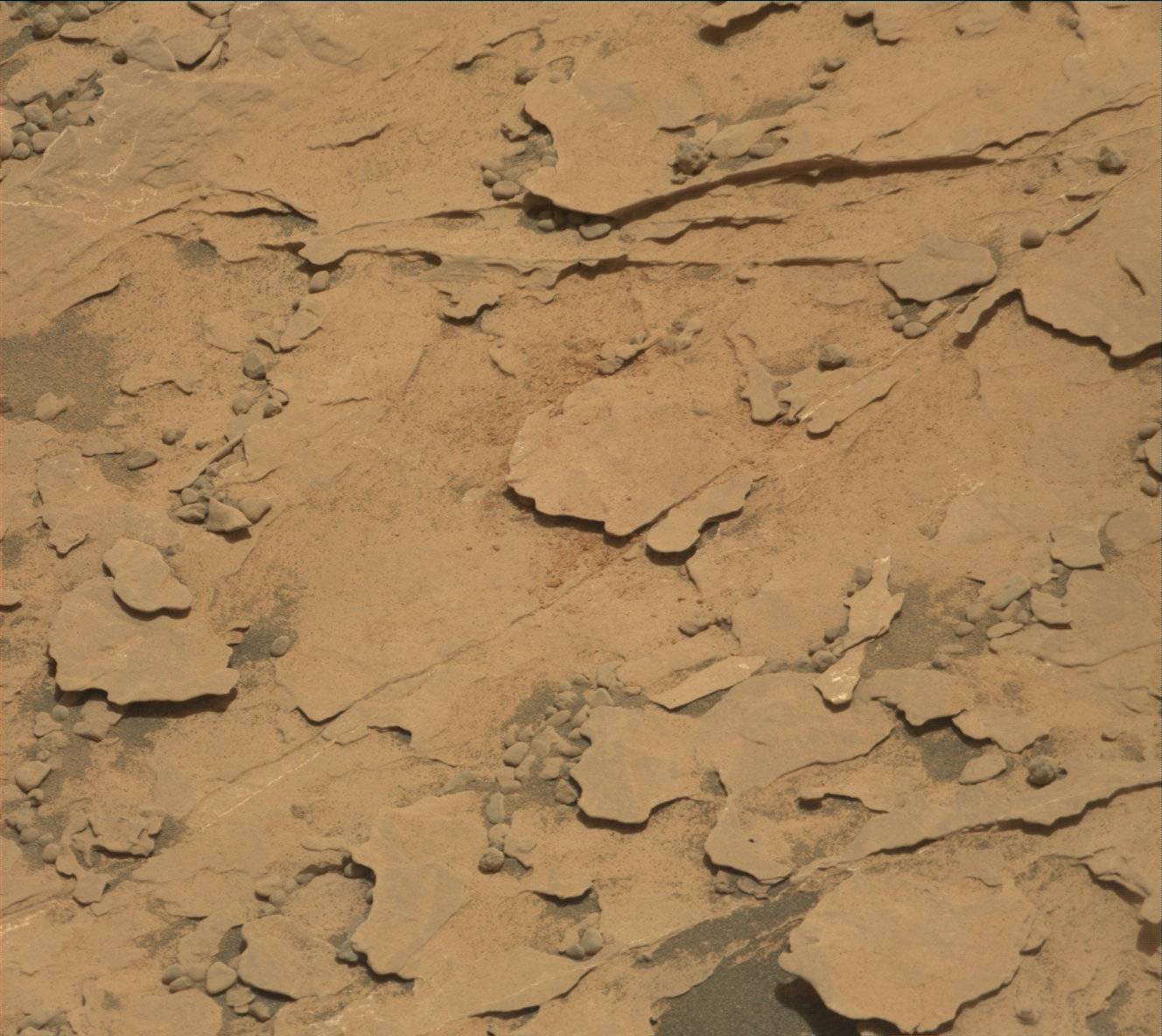{kind=link}
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate