
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Spirit Makes Tracks for McCool Hill as Opportunity Roves to Victoria

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
March 31, 2006
As autumn falls toward winter on the southern hemisphere of the Red Planet, the Mars Exploration Rovers are on the move again. Although the twin robot field geologists are roving as quickly as possible to their next major destinations, the pace is slowing down.
At Gusev Crater, Spirit has finished up its study of Home Plate in the Inner Basin and is currently making tracks toward McCool Hill, where the team plans to have the rover spend the winter on north-facing slopes. There, the tilt toward the Sun will help maximize daily energy output by the solar panels. On the other side of the planet, Opportunity completed science investigations at the outcrop Payson, roved away from Erebus crater and is on the trail heading to Victoria crater.
Both Spirit and Opportunity continue to be in good health, despite the fact that, according to the MER team, the rovers are -- in human years – in their 50s or 60s, or in other words, like aging Baby Boomers. They've got the annoying aches and pains to go along with the honor. And with winter coming, their energy levels are starting to wane, in part because the Sun is lower on the horizon and so the rovers' solar arrays are getting less and less sunlight and in part because they have been accumulating dust for quite a while now.
"We haven't had those wonderful cleaning events for a while," pointed out Joy Crisp, MER project scientist, at the Jet Propulsion Laboratory (JPL), where the rovers were designed and built. The dust has been building up on Opportunity since about Sol 640, so more than 130 sols, while Spirit has not had a decent dust-clearing event since about Sol 560, more than 230 sols. Not surprisingly, Spirit, which is only putting out about 350-watt hours of power, is feeling the lack of heat more than Opportunity which is regularly still producing a solid 500 watt-hours a day. "Spirit is at a minimum and that's why we're rushing to get to a northerly tilt," explained Ray Arvidson, rover deputy principal investigator, of Washington University in St. Louis, during an interview earlier today. As low as that energy level is, "it still allows us to do some things during the day," noted Crisp. "It just means that each day we have less time for driving, so it gets harder and harder as we go into the winter."
In addition to lower energy levels, the rovers' physical ailments are adding to the rovers' slower pace. The motor to Spirit's right front wheel is apparently gone for good. "We're pretty sure that's gone and so Spirit is going to have to drag that wheel from now on," reported Crisp. But other than that and the grinder on its rock abrasion tool (RAT), which is worn down, everything else is in good working condition and the rover is holding up extremely well some nine times longer than its "warranty."
Opportunity still has a gimpy wheel that's canted in because the azimuth drive is gone and the azimuth motor on the rover's robotic arm or instrument deployment device (IDD) is still "arthritic." Before the rover left Erebus, however, the MER engineers got the rover to twice successfully stow and unstow the arm by increasing the resistance, so it's still working, at least sometimes. "We haven't had any problems since coming up with that strategy and no other health issues have popped up on Opportunity," said Crisp.
This rover does continue to go into DeepSleep every few nights because of the IDD heater that has been stuck in the "on" position since the rover landed in January 2004 and the temperature is dropping now as fall progresses. That means the mini-thermal emission spectrometer (mini-TES) will be exposed to increasingly colder temperatures than it has been before and there is concern about how long the instrument can continue to operate, especially given that it has already defied all odds.
Despite the mechanical problems, the rovers have proven their resilience again and again and the team is optimistic they can make it through another bitter Martian winter. "We've done it before," said Arvidson. "The vehicles are a little older but other than [those few issues], we're okay." The dead of winter hits in August where the rovers are on Mars. "That's minimum Sun in winter solstice and then it starts coming back, so we have a few hundred sols with low energy conditions with both vehicles," he noted. "And I fully expect we'll be talking in 6 months."
Spirit from Gusev Crater
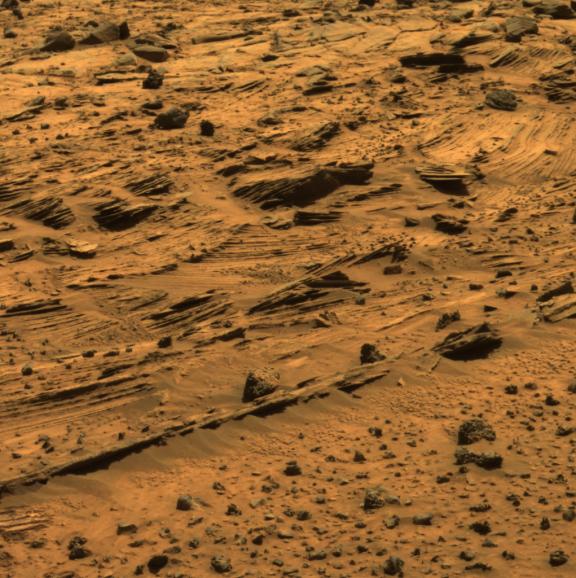
 At the edges of Home Plate
At the edges of Home PlateSpirit took this image on Sol 744 (March 7, 2006) with its panorama camera as it left Home Plate in the Inner Basin and headed for McCool Hill. It shows some of the most complex layering patterns seen so far at this location. "When you look at this image you can really say that Spirit has found some interesting stuff," says Joy Crisp, MER Project Scientist. In fact, the layered nature of these rocks raises new questions. Beyond their chemical properties, which scientists can study using the rover's spectrometers, these rocks record a detailed history of the physical properties that formed them.
Credit: NASA / JPL / Cornell
After completing a drive clockwise around the rim of Home Plate toward the south and east, Spirit roved into March and on to the top of some white outcrops there. After imaging those and checking them out, the rover spent much of the first week of the month studying a rock target called Fuzzy Smith that was laying atop Home Plate, using the microscopic imager (MI), Mössbauer spectrometer, and alpha particle X-ray spectrometer (APXS). "It looks like a loose rock that is blacker and rougher than the material of Home Plate and so we wanted to spend some time checking that out," Crisp said.
On Sol 771 (March 4), Spirit completed an analysis of targets on Fuzzy Smith dubbed Rube Foster and Willie Wells using the Mössbauer spectrometer and 13 filters on the panoramic camera (PanCam). On the following sol, Spirit stowed the robotic arm, took PanCam images of Fuzzy Smith, then drove 27 meters (89 feet) southeast across Home Plate, and spent the next day collecting science.
Spirit drove off of Home Plate on Sol 774 (March 7) and back into the Dugout, a gulley near the southeast edge of the big circular target. As the rover negotiated the journey, it conducted remote scientific studies of outcrops along the side of Home Plate and on Mitcheltree Ridge and collected mid-drive images along the way and post-drive images of surrounding terrain at the end of the drive. The rover also spent some time taking opacity observations of the afternoon dust and measurements of the sky and ground with the mini-TES.
During the second week of March, Spirit was ordered into a communications stand down from its primary communication line with Odyssey. The X-band frequencies that Spirit normally uses for commands were allocated by the Deep Space Network (DSN) to track the Mars Reconnaissance Orbiter (MRO) during its approach to the Red Planet. As MRO was pulling up to the Red Planet on March 10 and maneuvering through the tricky process of orbit insertion, "it needed all the attention it could get," Crisp said. "Nobody wanted to take any risks as MRO was trying to do this delicate MOI. Since the high-gain is the normal way we send up the commands to the rovers, we practiced uplinking commands via UHF beforehand." All went well. MRO slowed successfully into orbit and by Sol 780 Spirit was back on its own frequency. [Opportunity was on an entirely different X-band frequency and was not an issue.]
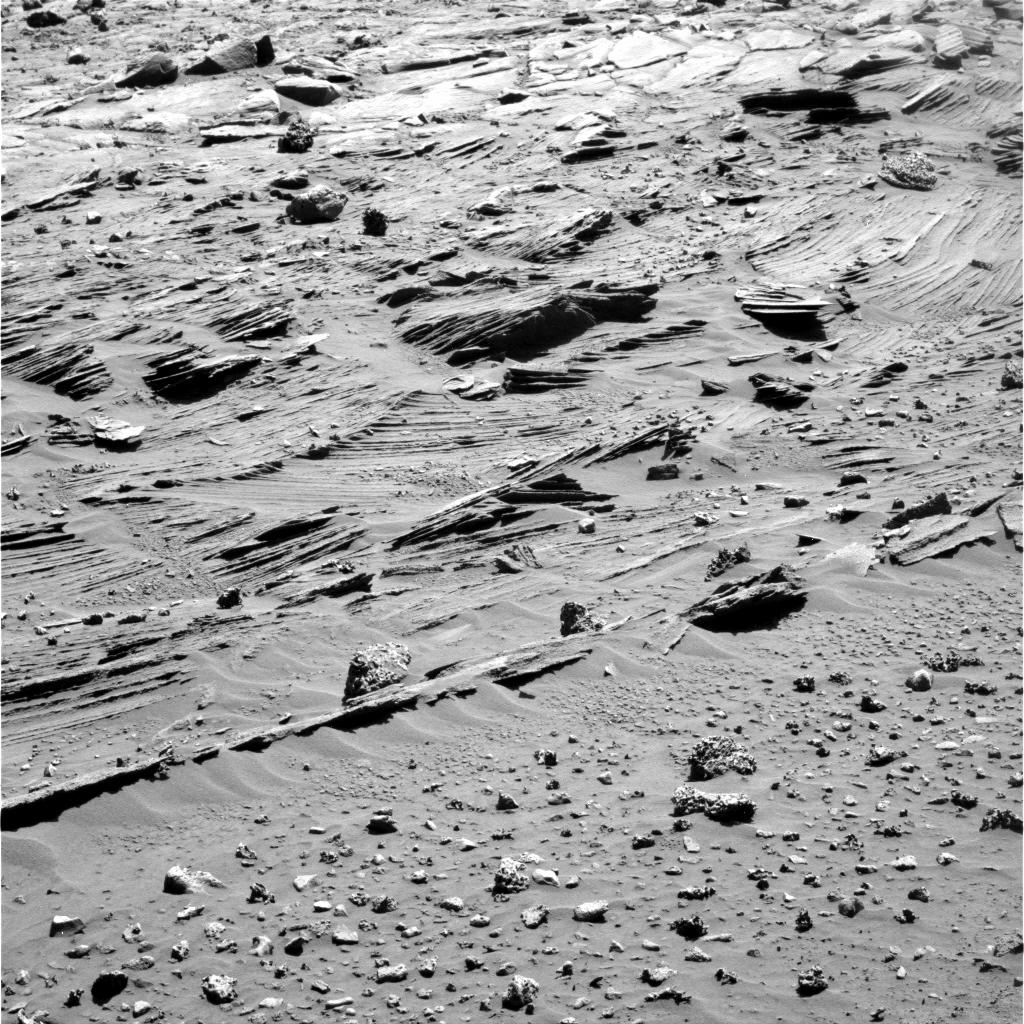
 At the edges of Home Plate
At the edges of Home PlateHere is the same image Spirit took on Sol 744, as above left, in color. In the center of this image, one group of layers slopes downward to the right. The layers above and below this group are more nearly horizontal. Where layers of different orientations intersect, other layers are truncated. This indicates that there were complex patterns of alternating erosion and deposition occurring when these layers were being deposited. Similar patterns can be found in some sedimentary rocks on Earth. Physical relationships among the various layers exposed at Home Plate are crucial evidence in understanding how these Martian rocks formed. The leading hypothesis is that the rocks at Home Plate were formed in the aftermath of a volcanic explosion or impact event. The scientists are now investigating the possibility that wind may also have played a role in redistributing materials after such an event.Credit: NASA / JPL / Cornell
By mid-March, Spirit had roved 103 meters (338 feet) southeast toward McCool Hill. Before driving too close to the next destination, the rover acquired the long-baseline stereo images needed for a mosaic of the hillside -- by taking PanCam images from one site, then driving 8 meters (26 feet) and acquiring the second half of the stereo mosaic. "The images provide measurements of surface features and are allowing us to assess the slopes more carefully and develop a map of where the good slopes will be to have our solar panels in a good position," explained Crisp.
Despite a reduction in solar energy, Spirit had enough energy to get in some morning atmospheric studies and take another series of cloud pictures – dubbed bitty cloud" movies --as it continued to make progress toward McCool Hill. Everything seemed to be going along just fine and then on Sol 779 (March 13) the drive actuator on the right front wheel stalled during a turn to adjust the position of the rover's antennas, bringing the day's drive to an end. The rover had gotten 29 meters (95 feet) closer to McCool, leaving another 120 meters (390 feet) to go. But that, as it would turn out, would be the last of that wheel. After all these months, it finally went.
Back on Earth, on March 15 and 16, MER engineers conducted tests on a testbed at JPL, as well as remotely on Spirit, but they couldn't determine what caused the right front actuator to stop working. Meanwhile, the operations team turned their attentions to conducting testbed experiments to understand the new characteristics of five-wheel driving on Mars and managed in short order to successfully command the rover to drive backward using only 5 wheels and on Sol 784 (March 18), Spirit roved on.
The rover quickly confronted a mound with a modest slope and sticky surface materials and stopped the drive after only 0.85 meters (2.8 feet) because of excessive slip. After a couple of days' analysis, Spirit moved away from the sticky mound with a 4.5-meter (15-foot) drive. After that, its drives were substantially shorter. "It was having a tough time because of the loose nature of the material," said Arvidson.
On Sol 787 (March 21), as Spirit roved away from the sticky mound, Odyssey's on-board fault protection sent it into safe mode. That meant the orbiter was unavailable for three days to relay data from either Spirit or Opportunity to Earth. Neither rover needed any delay, especially Spirit, so once Odyssey was back online, Spirit's flight team held a special Saturday planning session to make up for lost sols.
 More salty soil
More salty soilSpirit took this image Sol 796 (March 30, 2006) with its right front hazard camera while driving eastward from Home Plate toward the northwestern flank of McCool Hill. It shows some of the large amounts of bright soil that the rover has discovered in recent days. In mid-March, the rover's wheels unearthed a small patch of light-toned material dubbed Tyrone, which strongly resembled both Arad and Paso Robles, two patches of light-toned soils discovered earlier in the mission (Paso Robles was found on the Cumberland Ridge on the western slope of Husband Hill in 2005, and Arad was un-Marsed in January of this year on the basin floor just south of Husband Hill. Spirit's instruments confirmed that those soils had a salty chemistry dominated by iron-bearing sulfates. The rover's mini-TES spectrometer is analyzing these most recent discoveries, which seem to indicate that light-toned soil deposits might be widely distributed on the flanks and valley floors of the Columbia Hills region in Gusev Crater on Mars. The salts may record the past presence of water, as they are easily mobilized and concentrated in liquid solution.Credit: NASA / JPL
"The Sun is to our north, appearing over Husband Hill," reminded Arvidson. "The rover cannot tilt the arrays unless it tilts the whole vehicle, so we have to get to a hill that has a slope that has a tilt to the north. We're at almost -15 degrees latitude south and in the dead of winter the Sun will be at 25 north. That is a very, grazing incidence angle of sunlight on the rover during the noontime when we need maximum energy to charge up the battery to do operations."
Spirit is roving southeast of Home Plate and is currently about 120 meters (390 feet) from the base of McCool Hill. The driving is still "very slow," said Crisp. Since losing the right front wheel, the rover had that one good 4.5 meter drive on Sol 787, but since then each drive has only been a few meters or less. It hasn't really gotten very far in the last week. "It is terrain dependent and we're driving on a lot of loose soil, so we have more trouble than if it's hard ground, patches of outcrop where we make better progress.
At this point, the team hasn't decided whether or not Spirit will actually try to hit the slopes of McCool Hill, Arvidson said. "Spirit is on the edge and there's a very strong desire to get the rover tilted north and it may not be climbing McCool Hill. It may just be finding a local hill in an interesting area. It doesn't have to be a huge hill. We have a five-wheel drive vehicle now and that's making it a little bit tough to do slopes and sandy areas, so we're reevaluating the approach to be used for the rest of the mission. It really has to do with the extent to which that wheel dragging makes it more difficult either forward or backward to go onto slopes, particularly sandy slopes."
For now, Arvidson confirmed, it is more efficient to drive the rover backward. "When we did tests in the Mojave Desert, we found that the vehicle loves to climb up sandy areas going backwards, because of the suspension system and the center of gravity."
As it turns out, McCool Hill is, after recently revised calculations, taller than Husband Hill and the tallest of the seven hills in the Columbia Hills, so hiking up McCool could be Spirit's greatest challenge yet. "But I'm not sure the vehicle in its configuration with 5-wheel drive is as good a climber as it was with 6 wheels," said Arvidson. Still, McCool is alluring so the team is assessing the possibilities and will be discussing them next week. "It might be just going to the base of McCool Hill and tilting north," said Arvidson, "and then driving back and forth along the base on the north facing slope."
Opportunity from Meridiani Planum
Opportunity closed out February with successfully stowing and unstowing its arthritic IDD twice, conducting some untargeted remote sensing, including more PanCam images of the outcrop Payson and other targets, as well as mini-TES stares at the sky and ground, and then began March with more of the same. On Sol 748 (March 1), the rover used the PanCam to take a 13-filter image of Payson and specific targets there dubbed Wilderness Track and Maverick Queen. The rover also used the mini-TES on the same targets and relayed data home via Odyssey. Although the rover was in restricted sols, it slowly was traversing its way alongside the outcrop Payson.
From a position about 5 meters (16.4 feet) away from the outcrop, the rover continued the first week of the month conducting targeted remote sensing on Payson, taking PanCam images of targets dubbed Code of the West, Deer Stalker, Twin Sombreros, Thunder Mountain, and Fugitive Trail, all named after Zane Grey novels, informed Arvidson, "in keeping with the southwest theme set with the naming of the Mogollon Rim."
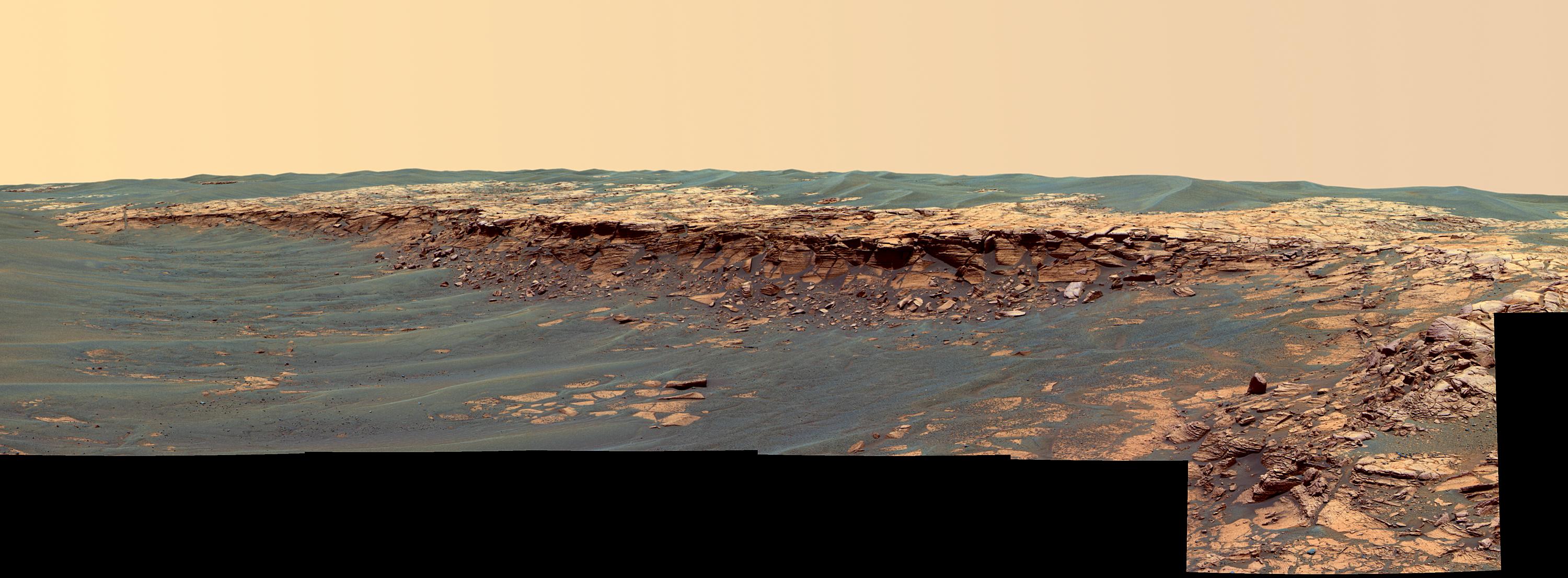 Payson panorama
Payson panoramaOpportunity acquired the images for this false color panorama of the Payson outcrop on the western edge of Erebus crater during Sol 744 (February 26, 2006). From this location at the northern end of the outcrop, layered rocks are visible in the crater wall, which is about 1 meters (3.3 feet) thick. The view also shows rocks disrupted by the crater-forming impact event and subjected to erosion over time. To the left of the outcrop, a flat, thin layer of spherule-rich soils overlies more outcrop materials. After many months of study, and a month or so of being stuck near the rim, the rover left the Erebus area on Sol 759 (March 13)and headed for Victoria crater.
Credit: NASA / JPL/ Cornell
As March marched on, Opportunity continued making its way south along the Payson outcrop, observing the approximately 25-meter (82-foot) length of the outcrop prior to the planned departure from Erebus crater. As it roved along, the rover conducted untargeted remote sensing along the way, as well as took images with the navigation camera and readings with the mini-TES of different objects right in front of the rover. On Sol 751 (March 5), the rover drove a short bump, took mid-drive PanCam images of Payson, then drove about 8 meters (about 26 feet) along one of two distinct "little troughs" they dubbed the Half-Pipe, after the popular Winter Olympics event. "The Half Pipe and Second Half Pipe are little troughs along the edge of Payson outcrop," explained Crisp. As Opportunity drove along the Half-Pipe, it conducted a shoot and scoot – roving and then stopping to collect high-resolution PanCam images of the outcrop, then moving on a short distance to another target and taking more images, and so on.
When Sol 757 (March 11) dawned at Merdiani Planum, Opportunity was perched at an entrance to Second Half-Pipe. There was more rubble and less nicely layered outcrop than at Half-Pipe. "We could see that a dune blocked the exit to the south, so we went in partway and then took some images of the outcrop and then drove back out of it," said Crisp. Before taking off, Opportunity used the PanCam to acquire images of a target called Yuman, then drove roughly 20 meters (66 feet) and acquired standard post-drive imaging plus a PanCam mosaic of target Hokan, and a mini-TES scan of the same target. The next morning the rover collected the second part of the Hokan panorama then drove 17 meters (about 56 feet) back out of the Second Half-Pipe, with a quick stop mid-way to collect a small PanCam mosaic of target Yavapai. At the end of this sol, the rover had completed all planned science at Erebus and was ready to hit the trail to Victoria crater.
Since the rover was operating in restricted sols, the team could plan drives only every other day, so Opportunity got off to a slow start on its trek away from Erebus on Sol 759 (March 13). As the rover moved south of the rim and onto the plains of dunes, troughs, and patches of bedrock outcrop, the MER team took Arvidson's suggestion and took to naming the targets Opportunity sees on the way to Victoria after cattle trails in the southwest. "We have one cow – that's the rover – and we're the drovers," Arvidson explained. "It's an important part of western history and so we've taken the approach of naming the targets after places along the Chisholm Trail and things that cowboys use."
 On the trail to Victoria
On the trail to VictoriaOpportunity took this image on Sol 775 (March 30, 2006) with its right panorama camera on its way to Victoria crater at approximately 12:59 Mars local solar time. It shows the Meridiani plains that lie ahead, a landscape of dunes and patches of outcrop.Credit: NASA / JPL / Cornell
The whole naming of rocks and ripples and dirt may seem silly, but the names serve an important purpose. "Whenever we have a target, we have to name it, otherwise it would be very difficult to relate the targets back to particular features or locations," Arvison offered.
In mid-March, back on its regular scheduled and out of restricted sols, Opportunity roved nearly 180 meters (591 feet) toward Victoria. On Sol 762 (March 16), the rover began the sol in front of a long, flat trough and was able to drive a little more than 53 meters (174 feet) along this path. It spent the next couple of sols taking atmosphere and cloud observations, as well as targeted remote sensing, including PanCam images of Red River Station and Kingfisher, and mini-TES examinations of Rush Springs and Red River Station. It also took images at various times over one days for more "bitty cloud" cloud movies.
For as far as the rover eyes can see, the plains that lie between Opportunity and Victoria crater appear to rolling dunes splotched here and there with patches of outcrop. "That's what we think based on the orbital images," noted Crisp. "We're using Mars Orbital Camera (MOC) images [from Mars Global Surveyor] to look at different paths we could take from where we are to Victoria, different ways we could take, in-between the dunes, to wind our way down there."
On Sol 765 (March 18), Opportunity drove over a small ripple, then down a trough to a patch of outcrop logging 48.5 meters (159 feet). The following sol, the rover drove 34.6 meters (114 feet) down a trough and over a few ripples, and the next sol pushed on over a few small ripples another 44 meters (144 feet). Odyssey went into safe mode before Opportunity's afternoon UHF relay pass on Sol 768 (March 21), so the team didn't know whether the rover had completed the drive on Sol 767; consequently, it planned a 70-minute direct-to-Earth communication session later that day. Mars is getting farther from Earth, and even with a Deep Space Network dish antenna 34 meters (112 feet) in diameter, the slow downlink rate yielded only 6 megabits of data. Still, it was enough however to indicate Opportunity had carried out all its tasks.
As Odyssey continued recovering from safe mode, Opportunity collected two tau readings. Tau is a measure of atmospheric opacity and collecting readings requires very little data volume. It addition, the rover also did a scan of sky and ground with the mini-TES.
Opportunity -- which has kept its IDD stowed since leaving Erebus -- has been roving since last week and is about 200 meters south of the southern edge of Erebus. The plan to only use the IDD if absolutely necessary remains. "What we won't do except under incredibly exceptional circumstances is to deploy the arm," Arvidson confirmed. "Deploying the arm becomes a pretty time consuming process relative to early in the mission, because sometimes we fault out because we don't apply enough current in its weakened state," he elaborated. "We really want to find a target that will provide a scientific bonanza before we stop and do that deployment. As a consequence, the focus is going across the plains and imaging and doing mini-TES of the sky, the ripples and the outcrops, but unless we see something new and exciting the target is clearly Victoria."
"We want to drive, drive, drive and get to Victoria, which still about 2000 meters (2 kilometers or 1.2 miles) away as the rover drives," Arvidson continued. "We're driving anywhere from 40 to 60 meters per sol and as long as the data volume and the energy hold out we'll drive as many sols in a row as we can." The team wants to save the IDD for Victoria where the outcrops are somewhere between 30 and 40 meters thick. "That," he said, "is our Promised Land.
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate