
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Updates on Curiosity from Ken Herkenhoff: Embarking for Mount Sharp (sols 326-372)

Written by
Ken Herkenhoff
Mastcam-Z Co-Investigator, USGS Astrogeology Science Center
August 23, 2013
Editor's note: Ken Herkenhoff has been writing very brief blogs about each day he spends on Curiosity operations since the rover landed on Mars more than a year ago. They are posted at the United States Geological Survey Astrogeology Science Center website. They provide a unique and valuable insight into the everyday operations of the mission. He's graciously given me permission to repost them here. But it took me a while to figure out how (and how frequently) I wanted to aggregate and post them. He often writes them the day a sol is planned -- which is before the plans are executed on Mars -- so images are not always available on the day that his posts appear. I'll be posting them in chunks, waiting for appropriate images to arrive first. My favorite place to browse these images is midnightplanets.com. My favorite place to follow the rover's driving progress is curiositylog.com.
Ken is a member of the Curiosity ChemCam and Mastcam/MAHLI/MARDI science teams. In tactical mission operations, he most often works in the capacity of "MAHLI/MARDI uplink lead." As such, he's responsible for planning and validating the observations that MAHLI (the Hand Lens Imager) and MARDI (the Descent Imager, which now points downward at the ground) perform. This planning is performed every weekday; typically one sol is planned each weekday except for Friday, when they produce a three-sol plan. MAHLI and MARDI are not used every day, but as a member of the science team Ken also participates in the Science Operations Working Group or SOWG discussions, where scientists and engineers plan out each sol's activities. Sometimes, Ken is in charge of the Science Operations Working group, working as "SOWG Chair."
We're beginning here on sol 326, right after Curiosity finished work in Yellowknife Bay and embarked on the journey toward Mount Sharp. Images are selected and added by me. Future sets of posts will cover shorter spans of time. I have concatenated all of Ken's earlier posts into a single page here, if you'd like to read them all from the beginning. --ESL
Sol 326: Road Trip (Fri, 05 Jul 2013)
We have started the long traverse to the base of Mt. Sharp (Aeolis Mons), the long-term goal of the mission! It may take a year to get there, depending on how many interesting features we find along the way. The challenge for the science team will be to identify the most important targets along the way, and to study them without delaying drive progress too much. Today we are planning targeted observations, followed by another drive over the weekend.
Sol 329: Twilight Wins (Mon, 08 Jul 2013)
I'm MAHLI/MARDI uplink lead today, planning Sol 329, which includes another drive toward Aeolis Mons ("Mt. Sharp"). We are planning MAHLI and MARDI images after the drive, to document the terrain in the new location. On Sol 318, we took MARDI images at various times of day to determine when to best acquire such images. The images show that images taken in twilight (right after sunset) best show details of the terrain next to the left front wheel. Because dust was deposited on MARDI's lens during landing, the contrast in MARDI images is reduced. During twilight, less light is scattered off the dusty optics.
MAHLI images of the view to the left of the rover can be acquired while the arm is stowed, by simply opening the MAHLI dust cover, taking an image, then closing the dust cover. These images include the horizon as well as terrain closer to the rover, so should be useful in documenting changes as we drive along.
Sol 335: Limited Visibilty (Mon, 15 Jul 2013)
The first few drives toward Mt. Sharp have been limited in length because some of the mobility software has not yet been checked out on the B computer. There are separate Hazcam and Navcam stereo pairs connected to each side of the computer, and the B Navcams behave a bit differently than the A Navcams. The camera pointing changes slightly with temperature, and had to be measured by taking images at various times of day. An improved model for the B Navcams has been loaded onto the rover, so now the software can be tested. Similar tests were required on the A computer early in the mission. In the meantime, drives have been limited to about 40 meters or less, depending on how much terrain is visible in the Navcam images from each location.
Sol 336: One Kilometer! (Tue, 16 Jul 2013)
MSL passed one kilometer total drive odometry during the Sol 335 drive! Hopefully the two kilometer mark will be passed much more quickly, as we are halfway through the nominal mission of one Mars year (669 sols). Like yesterday, I'm MAHLI/MARDI payload uplink lead today, planning images that we have been taking at the end of each drive: A MAHLI image from the stowed position and a MARDI image taken during twilight. These images are examples of the recurring observations that are being planned on drive sols, to document the terrain during the long traverse to Mt. Sharp (Aeolis Mons).
Sol 338: Juggling Priorities (Thu, 18 Jul 2013)
I've been SOWG Chair for the last three days of this week, planning drives every sol. We continue to experiment with various types of observations during and after the drive, to see which give us the most information for the time and data volume required. The team has been discussing the priorities of various observations, so that we can plan accordingly depending on the resources available each sol. The current plans include pre-drive targeted remote sensing, DAN neutron spectroscopy at multiple locations during the drive, and as much post-drive imaging as we can fit into the available downlink volume. The checkout of advanced (autonomous) driving software is going well, and we hope to be able to use it soon to extend the drive distance.
Sol 339: Visual Odometry (Fri, 19 Jul 2013)
I'm SOWG Chair again, planning three sols to get the rover through the weekend. This typically means a long Friday shift, and today is no exception. The 3-sol plan is complex, with lots of science observations and a 100-meter drive. The use of visual odometry (VO) was approved, so this capability is being used to ensure that the rover stays on path and avoids hazards. VO allows the rover to measure its progress by taking images of the terrain during the drive. In addition, the rover is currently on a relative topographic high, so visibility of the terrain ahead is better than usual. So while we are unlikely to be able to drive 100 meters every sol, it's nice to be able to plan such a long drive today.
Sol 345: Steady Progress (Thu, 25 Jul 2013)
We were happy to see that the long drive planned for last weekend went well, but don't expect to drive so far every sol until more software capabilities are checked out and cleared for use. I'm MAHLI/MARDI uplink lead today, planning single images after each drive that are becoming standard practice. Images and ChemCam measurements of nearby targets are also being planned as we make steady progress toward Aeolis Mons.
Sol 346 - 348: A Bit Hazy (Fri, 26 Jul 2013)
The Sol 345 drive went well, totaling 60 meters. We've received some nice (although a bit hazy) images of the traverse goal at the base of Aeolis Mons. We still have a long way to go, but are making good progress. I'm MAHLI/MARDI uplink lead again, planning 3 sols to get the rover through the weekend. As usual, we'll be taking MAHLI and MARDI images after the next drive, planned for Sol 347.
Sol 349: Two Rovers (Wed, 31 Jul 2013)
Curiosity continues to drive at every opportunity, typically 70 meters each. Planning these longer drives leaves less time for science observations, but the trade is worthwhile because more interesting geology lies ahead.
Meanwhile, Opportunity (launched over 10 years ago) has paused at a rock that shows interesting textures in close-up images. The Rock Abrasion Tool was used to grind into this rock to provide a fresh surface for APXS (elemental chemistry) measurements.
Sol 350: Multiprocessing (Thu, 01 Aug 2013)
The latest drive covered over 80 meters, and we are planning another drive on the second sol of the 3-sol weekend plan. In addition, more of the Cumberland drill sample will be dropped into SAM on the first sol, for analysis overnight. This is the first time arm activities and a drive have been included in the same plan--we are hoping it is not so ambitious that the tactical team will be working late into the night! I'm MAHLI/MARDI uplink lead today, planning the post-drive images that are routinely acquired to document the terrain along the long traverse to Aeolis Mons.
Sol 355: Ripple (Mon, 05 Aug 2013)
MSL landed on Mars one Earth year ago tonight, so there were cheers and applause during the SOWG meeting today. There are some nice products on the MSL web page celebrating the first of (hopefully) many anniversaries to come. Today the tactical operations team is planning targeted remote sensing and another drive. During the drive, the rover will pause to take images of its tracks after crossing a windblown ripple.
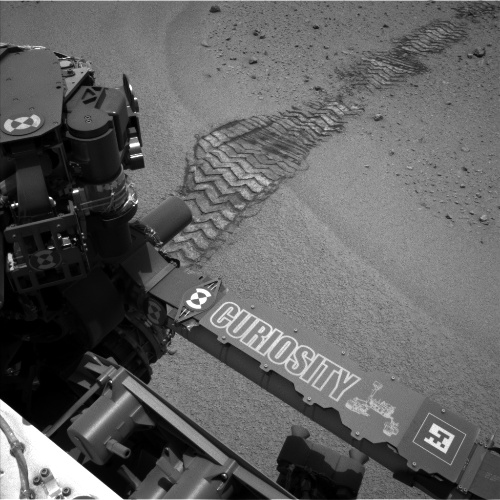
Tracks in the ripple following the sol 356 drive
NASA / JPL
Sol 356: First Earth Year! (Tue, 06 Aug 2013)
The MSL team is celebrating the first Earth year of operations on the surface of Mars, at JPL, on NASA TV, and at participating institutions around the world. In addition, the New York Times launched their Curiosity Tracker, which makes it easy to review previous results of the mission and keep up to date on the latest activities. Planning is "restricted" this week because Mars and Earth are out of sync, with today's plan for Sol 357 including some untargeted remote sensing. ChemCam and Mastcam will make observations of the ground near the rover, and we'll see what we get.
Sol 359: Simple Plan (Thu, 08 Aug 2013)
The Sol 356 drive went well, so another drive was planned for Sol 358. We are still "restricted," as the post-drive data will not arrive until 10 PM PDT tonight. So the Sol 359 plan includes only untargeted observations. The plan is therefore pretty simple, which is making for an easy SOWG Chair shift for me today.
Sol 360: Touch and Go (Fri, 09 Aug 2013)
My SOWG Chair shift today was especially busy, as we planned MSL's first "touch and go." The plan is to deploy the arm on Sol 360 for MAHLI and APXS observations of a rock right in front of the rover, then the arm will be stowed for another drive on Sol 361. We are also planning to observe a transit of Mars' larger satellite Phobos in front of the Sun early on Sol 363. The team has worked very hard to fit all of this good stuff into the plan today. If all goes well this weekend, we should be able to plan similarly complex arm+drive sols in the near future.
Sol 369: Revving Up (20 August 2013)
After taking a week off from MSL tactical planning, I was back on shift as MAHLI/MARDI uplink lead yesterday, planning Sol 369. We are no longer restricted by the offset between Earth and Mars time, so we can plan drives every sol this week. After each drive, we continue to take MAHLI and MARDI images to document the changing terrain near the rover. However, the rover did not drive last weekend to allow SAM to make another measurement of the Cumberland drill sample; the SAM data have not all been received yet.
Sol 371: Squeezing in Observations (21 August 2013)
The Sol 370 drive went well, and the rover stopped near an interesting outcrop. So we're planning as many observations as we can squeeze in before the next drive. Because we can see farther ahead of us than usual, the rover planners are planning to drive 100 meters or more. To allow this longer drive, some of the pre-drive science observations had to be deleted. In addition, we don't have time for the post-drive MAHLI stowed image. While removing these observations is frustrating, we all agree that driving has top priority.
Sol 372: Record Drive! (22 August 2013)
The Sol 371 drive set a new MSL distance record for a single sol, 110 meters. The Sol 372 drive will be shorter, but includes the first test of autonomous navigation ("AutoNav") on the "B" computer. After the Sol 200 anomaly, when the rover swapped to the B computer, problems with the terrain meshes generated using the B Navcams were noted and additional camera calibration data acquired. These data have been analyzed and show that the pointing of the B Navcams (mounted below the A Navcams) varies slightly with temperature. The results have been modeled and used to update the flight software. Accounting for the thermal dependence of the B Navcam pointing has been particularly complex for the AutoNav software, which is now ready for flight testing. The Sol 372 AutoNav checkout is complicated by the desire to set up the rover for potential arm contact science observations this weekend.
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate