
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Mars Exploration Rovers Update: Spirit Achieves Martian Year Milestone while Opportunity Reveals Harsh Challenges for Past Martian Life

Written by
A.J.S. Rayl
Contributing Editor, The Planetary Society
November 30, 2005
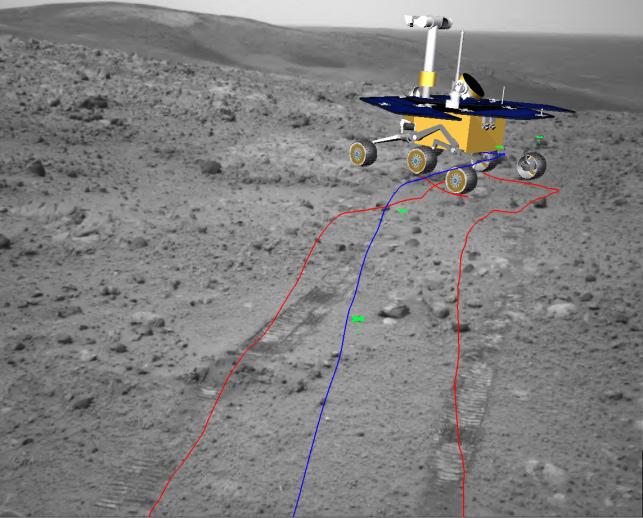 Simulated view of Spirit on the eastern side of Husband Hill
Simulated view of Spirit on the eastern side of Husband HillSpirit took the black-and-white base image in this view with her navigation camera during Sol 658/Nov. 8, 2005, while on the eastern side of Husband Hill. The superimposed colored lines and computer image of the rover indicate the rover's path ahead and the intended position at the end of the drive. Rover-team scientists and engineers use this type of simulated image as a help in planning activities for succeeding sols. Color: True color. Created: 8 November 2005.Credit: NASA/JPL-Caltech
In its orbit around the Sun, the Red Planet has been returning to where it was when the Mars Exploration Rovers first landed back in January 2004, and, as the twin robot field geologists are marking the milestone of their first Martian year -- equivalent to almost two Earth years -- fireworks are flashing all around the planet. Although the cause of the fireworks is actually debris from Halley's comet, through which Mars is currently passing, the timing seems so metaphorically appropriate.
The November work agendas made for a full fall and another productive month for the rovers, and Thanksgiving found the twins working through the entire holiday weekend, unlike their ground team that for the most part ate and relaxed on America's cherished days of indulgence.
Spirit spent November continuing her hike down Husband Hill. On November 21, the rover officially completed her first Martian year. (Opportunity will achieve that milestone at the end of the day December 11.) During her downward trek, Spirit made stops to join forces with the Hubble Space Telescope for a ground-truth experiment, as well as to study selected targets, conduct remote sensing, and take images of the Halley’s comet generated fireworks.
On the other side of the planet, Opportunity continued her drive along the west side of Erebus Crater toward some outcrop rocks and a large outcrop target dubbed Payson, a "particularly tasty-looking promontory" along the Mogollon Rim, as Steve Squyres of Cornell University, principal investigator for the science instruments on Spirit and Opportunity, has described it. Along the way, the rover pushed her odometer past mile 4 and actually drove over the gentle slope that is the rim and into Erebus, where she has since been checking out the outcrop exposures.
With both rovers in restricted sols for nearly half the month and the Thanksgiving holiday claiming the attentions of the ground team for 4 days, their work in November was "steady but measured," Albert Haldemann, rover deputy project scientist at the Jet Propulsion Laboratory (JPL), told The Planetary Society yesterday.
Restricted sols – what Haldemann described as " an inconvenient alignment of Earth time and Mars time" -- occur when the alignment between Earth and Mars is such that the timing of the communications pass with the Mars Odyssey orbiter is too late in the day, meaning that the ground crew cannot get the rover's location and health information after that day's commands were executed and so must wait until the next sol to confirm the rover's status and send up new commands. Therefore, during periods of restricted sols, the work slows down a bit because of those communication realities.
Nevertheless, both Spirit and Opportunity are in good health and are producing ample amounts of power, Haldemann reported. At Meridiani Planum, the local and regional scale dust storm activity that permeated the region has been dissipating and Opportunity experienced a decent gust of wind that cleaned her solar arrays, and Spirit was not as impacted by the storm as she might have been.
"We were hoping to have one more cleaning on each of the rovers to get us to a fully clean state after one Martian year on the surface – but that didn’t quite happen," said Haldemann. Still, no one can complain. The rovers are now at power levels that are just slightly lower than they were shortly after they landed.
"Projecting into the future, that means we're going to have a tougher time in the next Martian winter,” Haldemann noted. For the time being, however, the rovers couldn't seem to be happier, and considering their "warranties" were good for 90 days and about .3 of a mile, perhaps GM should take notice.
Spirit from Gusev Crater
Although Spirit was in restricted sols through Halloween and into the beginning of November, the rover was able to make some progress following the planned traverse paths across ridge lines east of the summit of Husband Hill, eventually maneuvering southward on her journey to the bottom.
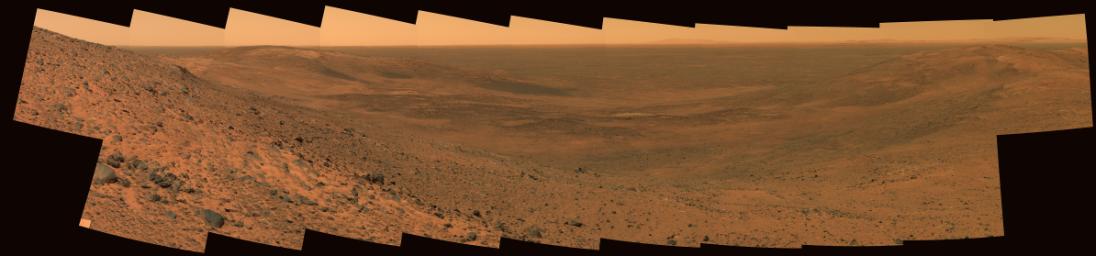 PanCam image of East Basin taken from Husband Hill
PanCam image of East Basin taken from Husband HillSpirit used the panoramic camera to obtain this view of the impact feature called East Basin, which is to the northeast of Husband Hill. The images combined into this mosaic were taken during Sol 653/Nov. 3, 2005, just before the rover descended eastward onto Haskin Ridge. The view is about 150 degrees wide. This is an approximately true-color rendering generated using the camera's various nanometer filters. The dark features on the far side of the basin, just left of center in this view, are basaltic sand deposits emplaced on the lee sides of hills by northwesterly winds. Haskin Ridge is visible along the right margin of the image, capped by a light-toned layer of rock, which Spirit investigated after taking this image. The basaltic plains located east of the Columbia Hills can be seen in the distance beyond East Basin. The rim of Thira crater is just visible on the distant horizon some 15 kilometers (9.3 miles) away. Color: True color. Created: 3 November 2005.Credit: NASA/JPL-Caltech/Cornell
While the rover has been making her way down the hill, she has been coming across a lot of light-toned rocks and outcrops. As November got underway, Spirit completed her close-up study of one of those rocks, dubbed Kansas, using all of the instruments on her instrument deployment device (IDD), including the Mössbauer and alpha particle X-ray spectrometers (APXS), the microscopic imager (MI), and the rock abrasion tool (RAT) on . The grinder is worn out on Spirit's RAT, but the brush still works, so the rover used that on Kansas then reimaged it to get a look inside.
The rover followed that study with some remote sensing of the East Basin and other selected targets, as well as some taking some night sky observations with the mini-thermal emission spectrometer (mini-TES).
Between Sol 655/November 5 and Sol 659/November 9, the rover drove southeast down onto Lower Haskin Ridge, logging a total distance of 126 meters (413 feet). In addition, on Sol 656/November 6, Spirit performed untargeted remote sensing and began observations in coordination with the Hubble Space Telescope that included a sky survey, an atmospheric opacity reading, calibration target readings, and a horizon survey.
"The experiment was basically about ground-truthing," said Haldemann. "With the Mars opposition – when Mars and Earth are as close as they get – we took observations of the sky and the ground during different illuminations because that's the best time for Hubble to look at Mars." [Mars reached opposition to Earth at 08:20 UT on November 7, 2005.] By combining all the data from Spirit and Hubble, scientists will be able to draw a better and more accurate picture of the region.
By November 7, Spirit's restricted sols had ended, the team was able to return to standard planning, and the rover began making some significant drives and measurable progress down Husband Hill, packing in the work as she went. Along the way, the rover took a large panoramic camera (PanCam) mosaic looking back at the East Basin for a long-baseline stereo observation, as well as coordinated science observations with the Hubble Space Telescope.
Spirit also used the PanCam to take pictures of the eastern part of the hill and took some additional images in the direction planners intended the rover to drive. The rover used the APXS and attempted to observe the Odyssey orbiter at night, performed long integrations with the Mössbauer spectrometer, conducted targeted stares with the mini-TES, and even did some atmospheric science.
On November 9/Sol 659, Spirit back-tracked about 8 meters (26 feet) to an intriguing sort of ledge in the hill, which the team dubbed Larry's Bench, where she conducted an extensive campaign with the tools on the IDD. Since arriving in the Columbia Hills in July 2004, the rover has found that the rocks scattered about and in the hills are incredibly diverse and some of the targets at Larry's Bench underscored that.
"We found some bedrock that seems to be pretty extensive that we've been looking and it may turn out to yet another different kind of rock in the Columbia Hills," Haldemann said. "It's a fun puzzle." As confounding as Spirits’ finds may be, they are certainly keeping everyone's interest.
By mid-month, the team was taking advantage of every drive sol, and Spirit averaged about 40 meters (131 feet) per sol. At night, the rover put in time with her PanCam, imaging Halley's fireworks. Over the Thanksgiving holiday, the rover completed a 360-degree panorama of her location, which the team is now calling the Seminole Panorama, and which is still coming down from Odyssey.
Currently, Spirit – which is back in restricted sols for the next week or so -- is about one-third of the way down Husband Hill. "We're figuring out now what our path should be and what the interesting scientific targets are," Haldemann said. "We have just begun to see in the recent panoramas an area on the north end of the Inner Basin, or just south of Husband Hill, that appears as a large, dark path in the overhead views from the Mars Orbital Camera (MOC) onboard Mars Global Surveyor (MGS)," he added. "We think this stuff is dune material and we've just gotten around a corner where we can see over towards it and we're considering whether that should be a target for us."
Opportunity from Meridiani Planum
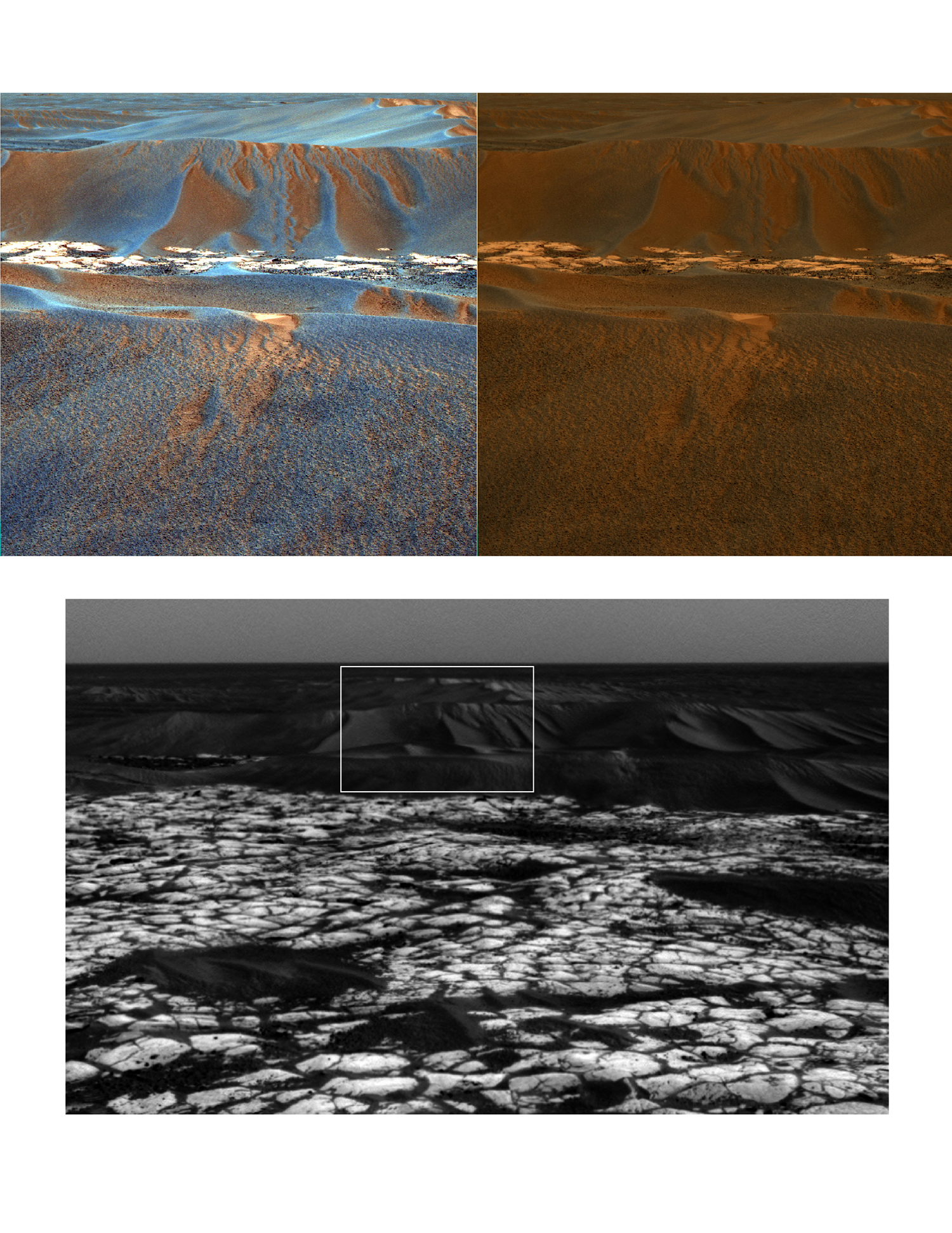 Looking east from Erebus Crater to windblown ripple, Scylla
Looking east from Erebus Crater to windblown ripple, ScyllaOpportunity acquired these images with the panoramic camera on Sol 644/Nov. 15, 2005 (upper two images) and the navigation camera on Sol 645/Nov. 16, 2005 (lower image). The view looks towards the east, covering a large wind-blown ripple called Scylla other nearby ripples and patches of brighter rock strewn with dark cobbles. Panoramic camera bands L4 (601-nanometer wavelength), L5 (535 nanometers), and L6 (482 nanometers) correspond to red, green, and blue bands in the false-color image shown in the upper left. The blue-tinted colors associated with the scours and ripple crests are probably due to the presence of basaltic sands mixed with hematite-rich spherules. Color patterns on the larger ripple flanks are caused by different amounts of reddish dust. The larger ripple flanks have an intricate mixture of erosional scours and secondary ripples extending downward from the main ripple crests, suggesting that these ripples have most recently encountered a period of wind erosion and transport of their outer layers. For comparison, the same panoramic camera image is shown in the upper right, but in this case rendered as an approximately true-color composite. Color: False color. Created: 16 November 2005.Credit: NASA/JPL-Caltech/Cornell
At Meridiani Planum, Opportunity continued her rove around Erebus Crater to the west, toward the area the team calls the Mogollon Rim, and specifically toward Payson, which appears to be the largest patch of rock and exposed cliff.
As Halloween approached, the MER team sent up a 3-day plan. It all started well on Sol 627/October 29 as the rover drove 51 meters (164 feet). To allow as much time as possible for driving on that sol, the rover's usual post-drive imaging from its new location was planned for the following sol. Overnight, Opportunity went into DeepSleep mode to save energy, but the dust storm that had been permeating the Meridiani region for weeks reduced sunshine enough on the morning of Sol 628 that Opportunity did not wake up from DeepSleep early enough for the first scheduled activities of that sol. [The morning after a DeepSleep, the rover wakes up only when the solar panels start putting out a prescribed level of energy.]
It was enough of a "fright" that the rover's onboard software properly put Opportunity into self-protective auto-mode for the day, and the team went into analysis mode which continued on into Sunday. Finally, on Halloween Day, the team uplinked commands to Opportunity to resume her activities, and on the following day, Sol 630/November 1, the rover successfully took pictures showing the terrain surrounding her new position.
Having survived Halloween, Opportunity got back to business, preparing for her next intensive campaign at an outcrop called Olympia, which included a RAT grind on a target called Kalavrita.
On Sol 636/November 7, the rover successfully used her mini-TES for the first time in nearly a month. The crew took extra precautions to allow quick recovery in the case of a reset, which during this past year this instrument has been known to intermittently initiate, but this time the mini-TES operated just fine.
As the month progressed, the dustiness of the atmosphere above Meridiani began to diminish and Opportunity moved onto another target on Olympia dubbed Ziakas, then to a cluster of cobbles, where she began a close-up examination on a cobble called Agrafa. A kindly gust of wind apparently blew by the rover on Sol 638/November 9, cleaning off much of the dust that had accumulated on her solar array. That caused the rover's average solar energy to spike up 720 watt-hours, not much below the power level she had shortly after landing nearly two Earth years ago. By Sol 639, November 10, Opportunity was bounding with new-found energy, but she also went into restricted sols that day and stayed there until Sol 650/November 21, which slowed the rover’s investigative field work some.
Following her study of Agrafa, Opportunity checked out another cobble, Antistasi, which data from the Mössbauer spectrometer and APXS revealed was very basaltic. She also monitored dust and took images of the surrounding outcrops and cobbles with the PanCam.
On Sol 645/November 16, the rover completed PanCam imaging to the east, of a large windblown ripple called Scylla. Then she put her pedal to the metal and roved 22 meters (about 72 feet) southward on an outcrop path around Erebus Crater, a drive that pushed her odometer past the four-mile mark [about 6,438 meters], setting yet another driving record on Mars. Not one to rest on her laurels, the rover continued working that day, using her PanCam to further analyze the outcrops and study terrain for future drives.
During the last couple of weeks, the rover has used her PanCam to check out outcrop targets named for towns in northern Arizona -- Show Low, Sedona, and Winslow, and a cobble target called Snowflake. Since then, Haldemann said, Opportunity has found some more interesting outcrops in a field near where she is currently.
"We’re doing careful mapping of the area now. There's a lot of the light-toned outcrop sulfate rock just exposed in between all the dunes and it's just continuous, so we're mapping that out and identifying some apparent changes in the sedimentary styles that are exposed horizontally. We're hoping we can re-identify these styles in the layers in the vertical face of the Mogollon Rim, which is still just a little too far away to see in detail."
In coming days, Opportunity will carry on as she has been, studying outcrops and roving ever onward to the Mogollon Rim.
Down on Earth, Earth and Planetary Science Letters published yesterday nine lengthy papers written by 60 researchers who analyzed the geology data Opportunity has returned since landing. Totaling nearly 200 pages in the November 30 issue of the journal, the collection -- titled "Sedimentary Geology at Meridiani Planum, Mars" -- is "the most significant set of papers our team has published," said Squyres, who edited the collection with Andrew H. Knoll, of Harvard University.
Together the papers present the most thorough analyses yet of Opportunity's discoveries, discussing the conditions of the region eons ago and comparing it to harsh habitats on Earth, explaining the origin of the round spheres of hematite dubbed "blueberries," and revealing the challenges that life may have faced in the harsh Martian environment.
Just two months after landing, Opportunity discovered evidence of past water in the area of Meridiani Planum that it was roving around, what the MER science team members hypothesized was once was a transient, salty, shallow sea. Those findings led the science team then to conclude that theoretically the area was once habitable.
In this recent batch of papers based on Opportunity's discoveries, scientists further confirmed that the conditions in the Meridiani region of Mars that Opportuntiy has been studying were sometimes wet, but were strongly acidic and oxidizing, conditions that probably posed stiff challenges to life – if life there were to have formed as life on Earth formed.
Scientists analyzed data from stacked sedimentary rock layers 23 feet thick that were exposed inside Endurance Crater, identifying three divisions within the stack. The lowest, oldest portion had the signature of dry sand dunes; the middle portion told of an environment of windblown sheets of sand with all the particles produced in part by previous evaporation of liquid water. The upper portion corresponded to layers Opportunity found earlier inside a smaller crater near its landing site.
They found that the materials in all three divisions were wet both before and after the layers were deposited by either wind or water. Some researchers described chemical evidence that the sand grains deposited in the layers had been altered by water before the layers formed. Other scientists analyzed how acidic water moving through the layers after they were in place caused changes, such as the formation of hematite-rich spherules within the rocks, conducting experimental and theoretical testing that reinforced the interpretation of changes caused by acidic water interacting with the rock layers.
"We made simulated Mars rocks in our laboratory then infused acidic fluids through them," explained researcher Nicholas Tosca from the State University of New York. "Our theoretical model shows the minerals predicted to form when those fluids evaporate bear a remarkable similarity to the minerals identified in the Meridiani outcrop."
The scientists concluded that the stack of layers in Endurance Crater resulted from a changeable environment perhaps 3.5 to 4 billion years ago, an environment that may have looked like salt flats that occasionally held water, surrounded by dunes. The White Sands region in New Mexico bears a similar physical resemblance, and, according to David Fernandez-Remolar of Spain's Centro de Astrobiologia, "[f]or the chemistry and mineralogy of the environment, an acidic river basin named Rio Tinto, in Spain, provides useful similarities."
Many types of microbes live in the Rio Tinto environment, one of the reasons for concluding that ancient Meridiani could have been habitable. However, the organisms at Rio Tinto are descended from populations that live in less acidic and stressful habitats. If Meridiani had any life, it might have had to originate in a different habitat. "Life that had evolved in other places or earlier times on Mars, if any did, might adapt to Meridiani conditions, but the kind of chemical reactions we think were important to giving rise to life on Earth simply could not have happened at Meridiani," said Knoll.
"You need to be very careful when you are talking about the prospect for life on Mars," Knoll said. "We've looked at only a very small parcel of Martian real estate. The geological record Opportunity has examined comes from a relatively short period out of Mars' long history."
Mars scientists generally agree that there is much, much more to know before the jury can come back in on the question of life on Mars – then, now, or in the future. We have but one sample of life – Earth life -- and the evidence of past water at Mars is a powerful allure. Another paper in the collection, titled "An astrobiological perspective on Meridiani Planum," suggests that while "the environmental conditions inferred for Meridiani deposition would have posed a challenge for prebiotic chemical reactions thought to have played a role in the origin of life on Earth [but]. . . Because sulfates and iron oxides can preserve detailed geochemical records of environmental history as well as chemical, textural and microfossil signatures of biological activity, Meridiani Planum is an attractive candidate for Mars sample return."
The last 40 years of Mars exploration has shown that the more scientists learn, the more there is to learn. It will be decades before planetary scientists really understand Mars and its similarities and differences compared to Earth. With the rovers, the data is coming faster than it ever has, and by all indications the rovers have miles to go before they sleep.
Actually, Mars will be in the news a lot in coming days and weeks because of all the rovers’ hard work. In addition to the current Mars issue of Earth and Planetary Science Letters, the two leading science journals Science and Nature have also published a spate of papers on findings from the European Space Agency's Mars Express yesterday. Next week, the American Geophysical Union (AGU) meets in San Francisco and a host of scientists will presenting even more data based on discoveries made by Spirit and Opportunity. "The data is getting out there and is being looked at other Mars scientists who are not members of the MER team but who are keen to see it and come up with their own working hypotheses to offer other ways of explaining what we see in the data,” Haldemann said. “And that's a good thing."
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate