
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Ices, Oceans, and Fire: Monday afternoon: Posters
Written by
Emily Lakdawalla
August 15, 2007
After John Spencer's excellent talk the conference attendees adjourned to a poster session and reception (PDF format). Poster sessions are a lot like Science Fairs; a researcher prepares a large poster summarizing his or her work, then stands in front of it as people walk by and examine it. Typically, people are too lazy or too weary to read all the text on the posters, so they walk up to the presenters and ask to have the work explained.
The first poster I aimed for caught my eye because this was sitting on the floor below it.
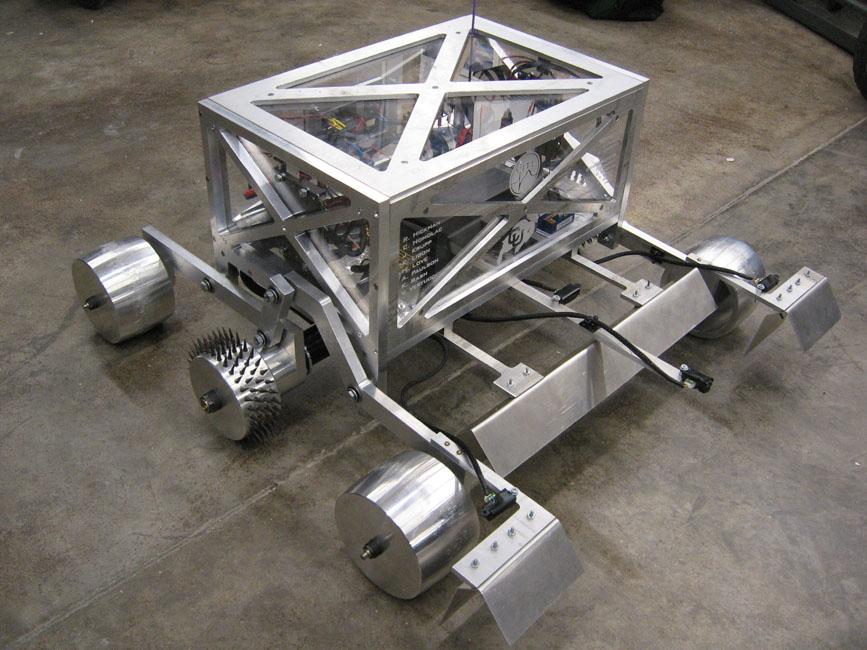
VITL team, University of Colorado
The Vehicle for Icy Terrain Locomotion

VITL team, University of Colorado
VITL driving wheel
The center wheels on VITL are each studded with 120 individually machined tempered steel spikes.The presenter, recent graduate Chris Homolac, told me that to test the mobility system, they needed an Earth analog with the hardness of ice on Europa, with slopes equivalent to 20-degree slopes found there -- but, if you correct for the different gravity between Earth and Europa, a 2.5-degree slope suffices. And ice on Europa is so cold as to be as hard as concrete is on Earth. Where did they find concrete and 2.5-degree slopes? In the University of Colorado parking garage, of course. The rover has a top speed of 0.6 centimeters per second (71 feet per hour), and successfully negotiated those slopes. Homolac also divulged that the spikes have drawn blood from every member of the team. Here's the project website if you want to see more.

NASA / JPL / Space Science Institute
Iapetus in false color
This view was produced from three captured through ultraviolet, green, and infrared filters on October 17, 2004. An intriguing line of white peaks sticks up above the brownish dark terrain. The full resolution image has been enlarged by a factor of two to show detail. The crescent is cut off on the right because Iapetus was nearly out of the field of view when Cassini took the picture.- As they approach Iapetus, they will capture a huge color mosaic of Saturn and its larger moons and rings. Then they will turn just about 180 degrees and take a picture of Iapetus. Saturn on one side, Iapetus on the other -- neat.
- During approach, Iapetus will be seen as a crescent (illuminated at a very high phase angle). This makes imaging hard. Tilmann has tried to sequence in some Saturnshine observations, but these don't work too well in Iapetus' dark terrain. Also, the long exposures that make Saturnshine work are hard to do with the spacecraft aiming dead-on for the planet -- small amounts of spacecraft wobble will blur the pictures. So he's mostly doing the Saturnshine observations on the bright poles, and is trying to take multiple shorter-exposure shots of the same target that might hopefully be summed to produce Saturnshine pictures in darker areas.
- At closest approach, it's hard to know where the image footprints are going to land, but he is trying a few very cool imaging sequences, including one targeted at Iapetus' limb, right on the equator. With any luck, those images will show Iapetus' mountains rising along the limb as Cassini skims over the moon.
Protect Our Shared Future
You help us defend humanity and prevent asteroid impacts. Donate now to become a Planetary Defender!
Donate