
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


All
All
 Sun
Sun Mercury
Mercury Venus
Venus Earth
Earth Mars
Mars Jupiter
Jupiter Saturn
Saturn Uranus
Uranus Neptune
Neptune Small Bodies
Small BodiesStories, updates, insights, and original analysis from The Planetary Society.

Sharing an eclipse with kids
Here's a simple and safe way to observe solar eclipses that's appropriate for young children, with no eclipse glasses or other special equipment needed.

A Goodbye, But Not Forever, From Emily Lakdawalla
After 19 years, Emily Lakdawalla is leaving The Planetary Society.

Sample Return Roundup
It's a banner year for sample return missions. In 2020, China, Japan, and the United States are all scheduled to have sample return missions in flight, seeking to retrieve material from near-Earth asteroids, the Moon, and eventually Mars.

Every Mars landing attempt as of June 2020
Two maps by The Planetary Society show all the places we've landed or crashed on Mars as of June 2020.

Video Chat From Outer Space With These Custom Wallpapers
Since some services like Zoom allow you to create virtual backgrounds, The Planetary Society offers you the opportunity to take your home office to Mars, or the Moon, or other fun places in space.

Star Trek: Picard Gets the Martian Landscape Right
The visual effects for the new television series Star Trek: Picard show a wonderfully realistic Mars in panoramic views that obviously rely upon NASA and ESA imagery. This article is spoiler-free except for the disclosure of an important event depicted in the opening moments of the show.

The December Solstice 2019 Issue of The Planetary Report Is Out!
Featuring an article by Abigail Fraeman on what the Mars Exploration Rovers Spirit and Opportunity taught us, and one by Javier Gómez-Elvira on the next steps in the search for life on Mars.

Emily Lakdawalla's Recommended Space Books for Kids, 2019
Welcome to my 11th annual list of recommended space books for kids! This year I had more than 80 books to read, and I've winnowed the list to recommend 29. There are books for all ages from 0 to 18 and beyond.

The September Equinox 2019 Issue of The Planetary Report Is Out!
A new issue of The Planetary Report brings you our pride in the success of LightSail 2 and our gratitude to our members for making it happen. Plus Venus science from Akatsuki and Venus Express, and the status of planetary defense.

Where We Are on 1 October 2019
We lost and gained spacecraft at the Moon last quarter. India’s Chandrayaan-2 left Earth orbit for the Moon on 13 August, and its Vikram lander aims at a 7 September touchdown. Lunar Reconnaissance Orbiter just celebrated its tenth launch anniversary. China’s smallsat Longjiang-2 crashed on 31 July, ending its successful mission.

Emily's Recommended Kids' Space Books: Special Apollo 11 Anniversary Edition for July 2019
So many Apollo-related books have come out in the first half of 2019 that I decided to cover them in a special summer book-recommendation blog. I have 5 brand-new Apollo-related books to recommend for kids, and include others I've recommended in past years.

InSight Update: A Couple More Tiny Quakes and Heat Probe Progress
InSight has detected a couple more small Marsquakes, and the team has lifted the housing of the heat probe off the ground, exposing the top of the mole in a surprisingly wide hole.

ESA to Launch Comet Interceptor Mission in 2028
With Comet Interceptor, ESA plans to meet a comet on its first trip into the inner solar system. The mission was selected yesterday after a fast-track proposal process and will be developed on a rapid (for ESA) timeline, with a launch planned for 2028.
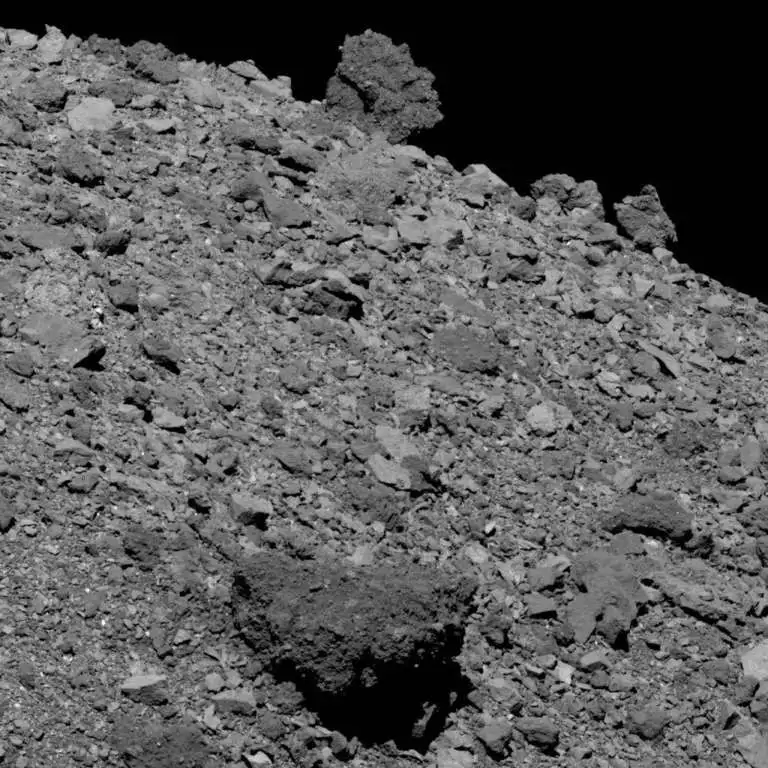
OSIRIS-REx Sets Low-Orbit Record, Enters New Orbital B Mission Phase
Last week, NASA’s OSIRIS-REx asteroid sample-return mission announced that they had achieved an orbit above asteroid Bennu with an altitude of only 680 meters. Now they are surveying for landing sites and have invited the public's help.

Where We Are on 1 July 2019
The last quarter has seen few changes in the roster of planetary exploration spacecraft. SpaceIL’s lunar lander Beresheet is now on the lunar surface. Its descent on 11 April seemed to go nearly perfectly. Unfortunately, a cascade of events shortly before its planned landing caused it to hit the ground too fast, and it did not survive.

The June Solstice 2019 Issue of The Planetary Report Is Out!
Two feature articles bring you the excitement and science of exploring two very different representatives of the solar system's smaller worlds.

ESA Prepares for ExoMars Rover 2020 Launch at Mars and on Earth
Preparations for the ExoMars rover mission are in their final stages. ESA made two announcements today: ExoMars Trace Gas Orbiter is shifting orbit, and they officially opened a new Rover Operations Control Centre (ROCC) in Turin, Italy.

Curiosity Gazes Upon Noctilucent Clouds Over Gale Crater
Wispy clouds of stunning beauty fly over Curiosity every evening.
Lunar Reconnaissance Orbiter Images Beresheet Impact Site
Lunar Reconnaissance Orbiter has successfully imaged the impact site of the Beresheet lander, which made a really good run at performing the first privately funded Moon landing on 11 April, but crashed after the failure of its main engine.

China’s SmallSat Lunar Mission Longjiang-2 to Deorbit on 31 July
According to amateur spacecraft tracker Daniel Estévez, Longjiang-2 will crash into the Moon on 31 July after more than a year in lunar orbit.